实习报告
报 告 人:XXX
学 号:xxxxx
指导老师:胥 明
实习时间:201x.8.19—201x.8.30
实习地点:江苏东大工程检测技术有限公司
为了进一步学会运用力学专业的知识,提高实践操作技能,短学期开学,我们班就在胥明老师的指导下,在江苏东大工程检测技术有限公司开始了为期两周的工程检测实习。结合我们力学专业三年来所学习过的专业知识以及江苏东大工程检测技术有限公司经常开展的检测项目,我们主要进行了梁板式橡胶支座抗压弹性模量、预应力钢绞线拉伸、板式橡胶支座抗剪弹性模量、钢结构高强螺栓、下水道环刚度、预应力钢绞线松弛等检测项目。此外,我们还在胥老师的带领下参观了其他检测试验和结构试验室。
对于钢绞线的力学性能的测试,主要分为钢绞线的拉伸和应力松弛。在钢绞线的拉伸试验中,由于对于实验者的操作经验要求很高,我们没有动手操作的能力,而是观看了试验室老师们的实验过程。首先是对试件进行安装,特别需要注意的是对标距的控制以及对试件端部的夹紧,并要保证夹具的三块不同部分在同一平面内,否则会严重影响实验结果。本次试验后,我们对所采集到的数据进行了处理,并画出了趋势线,这样更加直观的反应出试件的抗拉弹性模量和规定非比例延伸率以及屈服强度。


在钢绞线的松弛试验中,我们仔细的记录了每隔一分钟钢绞线受力的特性,并利用excel表格分析推测了1000h后钢绞线的应力松弛率。本次试验温度对检测结果的影响很大,因此,要想成功做出试验结果必须使温度保持在一个定值。

应力松弛试验装置
对高强螺栓的抗扭系数的测定,这个试验完全由我们自行完成。试验的关键在于高强螺栓的安装,将其夹在夹具上时必须将六角螺栓的六个边与夹具边贴合,否则在加扭矩的时候,会把螺栓夹坏。记录最大扭力、当前轴力和扭矩系数后,可以通过分析数据的算术平均值跟标准差来判断本次试验的结果。这次试验由于完全是由试验者控制施加扭矩的,对于轴力的把握准确度不太够,所得到的数据误差有些大,但是试验结果基本符合实际参数。在以后的试验中,还应掌握更多技巧,以得到更精准的结果。
对橡胶支座的力学性能的测试,主要包括抗压弹性模量和抗剪弹性模量的测量。这两组试验的关键是位移计的安装,由于本组试验产生的位移非常小,通过位移计可以准确记录位移的大小。利用拉伸装置来实现对剪切模量的测量,即先对试样施加相应的压力,通过摩擦力的作用形成固定端,然后通过钢板与橡胶支座的作用产生剪力,记录位移,处理数据后得到剪切模量。

橡胶支座的抗剪弹性模量测试
对下水道环刚度的测试,关键在于准确的测出管道的物理参数,在安装试件的时候要特别注意需将测力计的顶端与水管的最高点重合,否则会影响试验精度。
最后我们还参观了东大的结构试验室,对于梁的贴片技术有了新的了解,知道了对结构通过碳纤维布进行加固的技术,还知道了不同试样的试验方法,如剪力墙的强度变形试验通过比例缩放后,由相似原理来进行模拟等。
很快我们为期两周的实习试验就结束了,在这次实习过程中,我们学会了很多操作技能,知道了怎样通过查阅国家标准来了解现价段行业规范对测量方法的制定,也进一步提高了采集数据和处理数据的能力,同时接触到了更多的excel强大的数据处理功能,这为我们今后的毕业设计和工作都提供了宝贵的经验。
这次试验采用分组形式,本组成员是XX,XXX,XXX,XX。每次试验前,我们小组成员会提前准备好上课所用的标准,有时还会对试验中可能出现的问题进行提前商讨,将不会的内容做好记录并在试验时与胥老师探讨。这使我们每一个人都参与到了试验中,一定程度上锻炼了自己的自学能力和团队合作能力。在今后的学习中我们应珍惜每一次试验机会,让自己得到充分的锻炼。
第二篇:检测技术实验报告 东南大学
 东南大学自动化学院
东南大学自动化学院
实 验 报 告
课程名称: 检 测 技 术
第 2 次实验
实验名称:
院(系): 专 业:
姓 名: 学 号:
实验室: 实验组别:
同组人员: 实验时间:年 11 月 23 日
评定成绩: 审阅教师:
实验十二 电涡流传感器位移实验
一、基本原理
通过交变电流的线圈产生交变磁场,当金属体处在交变磁场时,根据电磁感应原理,金属体内产生电流,该电流在金属体内自行闭合,并呈旋涡状,故称为涡流。涡流的大小与金属导体的电阻率、导磁率、厚度、线圈激磁电流频率及线圈与金属体表面的距离x等参数有关。电涡流的产生必然要消耗一部分磁场能量,从而改变激磁线线圈阻抗,涡流传感器就是基于这种涡流效应制成的。电涡流工作在非接触状态(线圈与金属体表面不接触),当线圈与金属体表面的距离x以外的所有参数一定时可以进行位移测量。
二、实验器材
主机箱、电涡流传感器实验模板、电涡流传感器、测微头、被测体(铁圆片)。
三、实验步骤
1、观察传感器结构,这是一个平绕线圈。根据图安装测微头、被测体、电涡流传感器并接线。
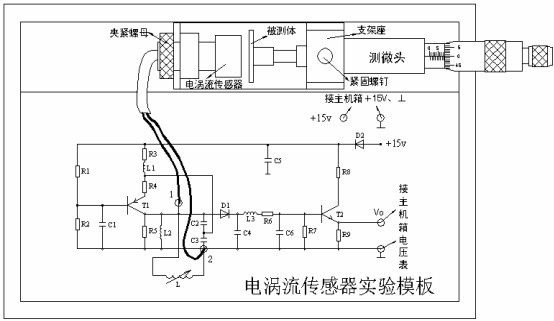
2、调节测微头使被测体与传感器端部接触,将电压表显示选择开关切换到20V 档,检查接线无误后开启主机箱电源开关,记下电压表读数,然后每隔0.1mm 读一个数,直到输出几乎不变为止。将数据列入表。
表 电涡流传感器位移X 与输出电压数据

续表


3、画出V-X 曲线,根据曲线找出线性区域及进行正、负位移测量时的最佳工作点(即曲线线性段的中点)。试计算测量范围为1mm与3 mm时的灵敏度和线性度(可以用端基法或其它拟合直线)。实验完毕,关闭电源。
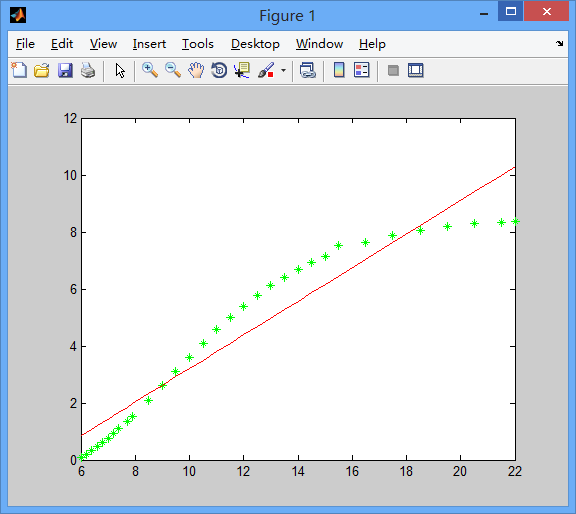
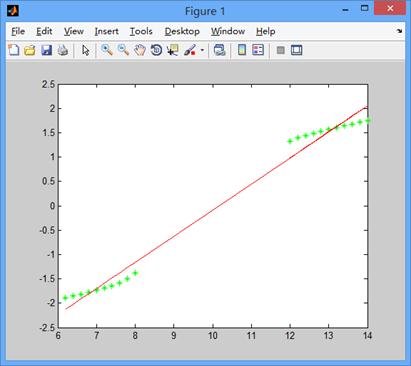
变化部分的拟合曲线为:
V=0.590*X-2.692
单位转换之后
V=590*X-2692
由图可知最佳工作点为 8mm
根据拟合曲线知灵敏度为 590 mV/mm
由端基法的拟合直线线性度的公式为:
 可知:
可知:

由曲线拟合易知测量范围为1mm时最大偏差
所以有

由于测量时的失误,仅能算出测量范围为1.5mm时最大偏差
所以有

四、思考题
1、电涡流传感器的量程与哪些因素有关,如果需要测量±5mm的量程应如何设计传感器?
一般来说金属导体的电阻率c,厚度t,线圈的励磁电流角频率ω以及线圈与金属块之间的距离x等参数会影响传感器的量程。
2、用电涡流传感器进行非接触位移测量时,如何根据量程使用选用传感器。
可以通过贴金属片等方式进行测量
实验十五直流激励时线性霍尔传感器的位移特性实验
一、基本原理
根据霍尔效应,霍尔电势UH=KH·IB,当霍尔元件处在梯度磁场中运动时,它的电势会
发生变化,利用这一性质可以进行位移测量。
二、实验器材
主机箱、霍尔传感器实验模板、霍尔传感器、测微头。
三、实验步骤
1、按图示意图接线(实验模板的输出Vo1 接主机箱电压表的Vin),将主机箱上的电压表量程(显示选择)开关打到2v档。

2、检查接线无误后,开启电源,调节测微头使霍尔片处在两磁钢的中间位置,再调节Rw1 使数显表指示为零。
3、向某个方向调节测微头2mm位移,记录电压表读数作为实验起始点;再反方向调节测微头,每增加0.2mm 记下一个读数(建议做4mm位移),将读数填入表中
起始位置为5mm处,先右移到7mm处,然后依次左移到3mm处

续表:

作出V-X 曲线,计算不同测量范围时的灵敏度和非线性误差。
实验完毕,关闭电源。
拟合曲线为:
V=0.5367*X-5.456
单位归一之后:
V=536.7*X-5456
根据拟合曲线知灵敏度为 
对于非线性误差,由拟合曲线知,最大偏差为:
所以:
四、思考题
本实验中霍尔元件位移的线性度实际上反映的是什么量的变化?
由霍尔传感器的工作原理U=KIB知,霍尔元件实际感应的是所在位置的磁场强度B的大小。实验中,霍尔元件的线性实际上反映了空间磁场的线性分布,揭示了元件测量处磁场的线性分布。
实验十六交流激励时霍尔式传感器的位移实验
一、基本原理
交流激励时霍尔式传感器与直流激励一样,基本工作原理相同,不同之处是测量电路。
二、实验器材
主机箱、测微头、霍尔传感器、霍尔传感器实验模板、移相器/相敏检波器/低通滤波器模板、双线示波器。
三、实验步骤
1、实验模板接线见图(注意:暂时不要将主机箱中的音频振荡器Lv接入实验模板)

2、首先检查接线无误后,合上主机箱总电源开关。调节主机箱音频振动器的频率和幅度旋钮,用示波器、频率表监测Lv输出频率为1KHz、峰峰值为4V的信号。关闭主机箱电源,将Lv输出信号作为传感器的激励电压接入图的实验模板中。(注意:Lv电压峰峰值为4V,幅值过大会烧坏传感器)
3、合上主机箱电源,调节测微头使霍尔传感器的霍尔片处于两磁钢中点。先用示波器观察使霍尔元件不等位电势为最小,然后观察数显表显示,调节电位器Rw1、Rw2 使显示为零。
4、调节测微头使霍尔传感器产生一个较大位移,利用示波器观察相敏检波器输出,旋转移相器单元电位器Rw 和相敏检波器单元电位器Rw,使示波器显示全波整流波形,并观察数显表显示值。直至数显表显示为零,此点作为测量原点。然后旋动测微头,每转动0.2mm,记下读数,填入表中
起始位置为5mm处,先右移到7mm处,然后依次左移到3mm处

5、根据表作出V~X 曲线,计算不同量程时的非线性误差。实验完毕,关闭电源。
拟合曲线为: 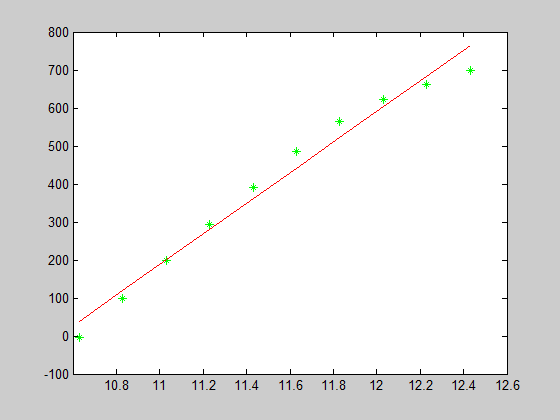

根据拟合曲线知灵敏度为 
对于非线性误差,由拟合曲线知,最大偏差为:
所以: