实验报告
实验名称:积分分离PID控制算法
课程名称:计算机控制系统
姓名:蓝娜
学号:12062115
班级:电气2班
指导老师:陈雪亭
日期:20##年11月11日
实验背景:在数字控制系统中,积分控制分量的引入主要是为了消除静差,提高系统的精度。但在过程启动、停车或大幅度改变设定值时,由于产生较大的偏差,加上系统本身的惯性和滞后,在积分作用下,计算得到的控制量将超出执行机构可能的最大动作范围对应的极限控制量,结果产生系统输出的较大超调,甚至引起系统长时间的振荡,这对大多数的生产过程是不允许的,由此引进积分分离PID算法,既保持了积分作用,又可减少超调量,使系统的控制性能得到较大的改善。
实验基本思想:在偏差e(k)较大时,暂时取消积分作用;当偏差e(k)小于某个阈值时,才将积分作用投入。
1)根据实际需要,设定一个阈值ε>0。
2)当|e(k)|>ε,即偏差较大时,采用PD控制,可避免大的超调,又使系统有较快的响应。
3)当|e(k)|<=ε,即偏差较小时,采用PID控制或PI控制,可保证系统的控制精度。
积分分离形式:u(k)=Kp{e(k)+ }
}
式中β=1(|e(k)<=ε|) 或β=0 (|e(k)|>ε)
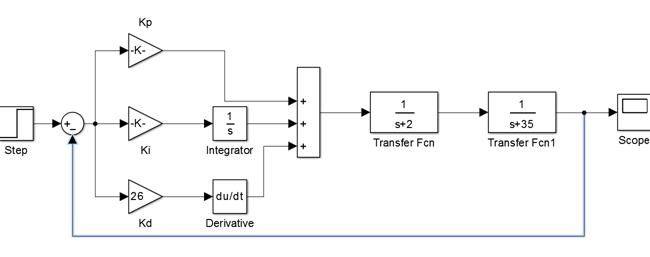
实验目的:利用Simulink设计数字PID控制器,加入模块Switch,通过调整阈值实现积分分离,并通过Simulink仿真与标准PID控制进行比较。
实验线路图:
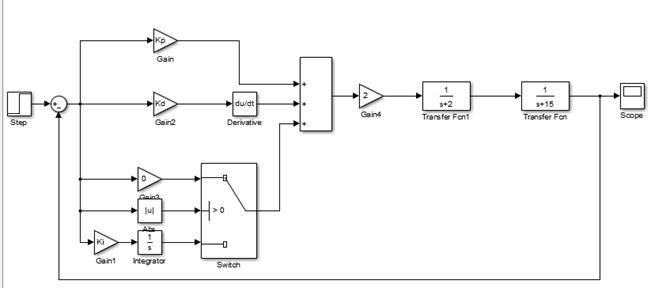
普通PID控制线路:上次实验得到较好系统性能的整定后的参数为Kp=600,Ki=450,Kd=26。此次实验会在上次实验的基础上作进一步的改进,引入积分分离。
http://blog.sina.com.cn/s/blog_6a04c83201018gu9.html
实验结果:
(1)当Ki、Kd为0,Kp=1时得到的响应曲线如下:
(2)当Kp逐渐增大,Ki、Kd=0时,得到图像如下:

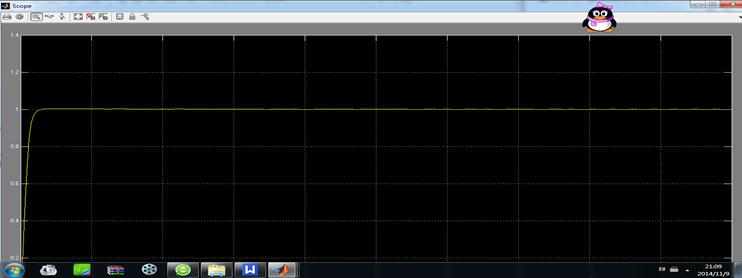
(2)由上图像得,只改变比例系数Kp,超调量变大,且稳定性能也不高。当加入积分环节并适当调节Kp与Ki时,得到如下图像:
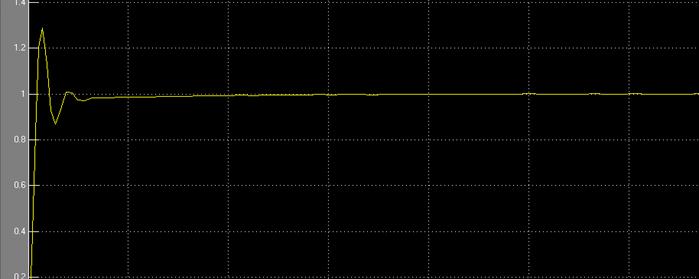
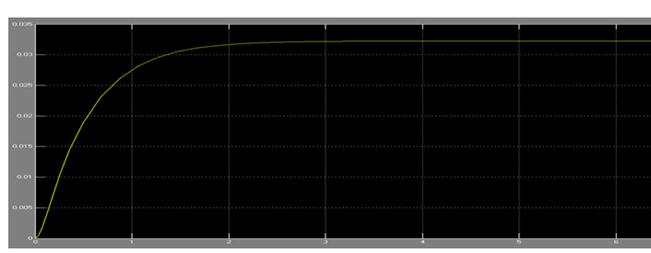
(4)由上图得,加入积分环节后,稳定性提高了,但超调量加大了。这时加入微分环节,构成PID控制系统,当适当调节Kp、Ki、Kd后,得到了一条良好的响应曲线,如下:
总结:通过Simulink仿真观察响应曲线,最终调节的Kp、Ki、Kd分别为600,450,26时得到如上响应曲线。从该曲线知整定参数后的系统稳定性好,超调小(几乎没有)。由此可知,PID系数不可过小,因为这会使计算机控制输出也较小,从而使系统量化误差变大,甚至有时控制器根本无输出而形成死区。通过这次实践了解了积分分离PID的工作原理,通过改变参数,得到不同的实验效果。
第二篇:数字PID调节器算法的研究实验报告
实验四 数字 PID 调节器算法的研究
一、实验目的
1.学习并熟悉常规的数字PID 控制算法的原理;
2.学习并熟悉积分分离PID 控制算法的原理;
3.掌握具有数字PID 调节器控制系统的实验和调节器参数的整定方法。
二、实验设备
1.THTJ-1 型计算机控制技术实验箱
2.THVLW-1 型USB 数据采集卡一块(含37 芯通信线、USB 电缆线各1 根)
3.PC 机1 台(含上位机软件“THTJ-1”)
三、实验内容
1.利用本实验平台,设计并构成一个用于混合仿真实验的计算机闭环实时控制系统;
2.采用常规的PI 和PID 调节器,构成计算机闭环系统,并对调节器的参数进行整定, 使之具有满意的动态性能;
3.对系统采用积分分离PID 控制,并整定调节器的参数。
四、实验原理
在工业过程控制中,应用最广泛的控制器是 PID 控制器,它是按偏差的比例(P)、积分(I)、微分(D)组合而成的控制规律。而数字PID 控制器则是由模拟PID 控制规律直接变换所得。
在 PID 控制规律中,引入积分的目的是为了消除静差,提高控制精度,但系统中引入了积分,往往使之产生过大的超调量,这对某些生产过程是不允许的。因此在工业生产中常用改进的PID 算法,如积分分离PID 算法,其思想是当被控量与设定值偏差较大时取消积分控制;当控制量接近给定值时才将积分作用投入,以消除静差,提高控制精度。这样,既保持了积分的作用,又减小了超调量。
五、实验步骤
1、实验接线
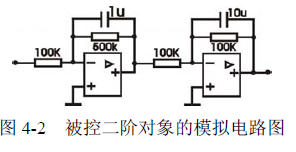
1.1 按图4-1 和图4-2 连接一个二阶被控对象闭环控制系统的电路;
1.2 该电路的输出与数据采集卡的输入端AD1 相连,电路的输入与数据采集卡的输出端DA1 相连;
1.3 待检查电路接线无误后,打开实验平台的电源总开关,并将锁零单元的锁零按钮处于“不锁零”状态。
2、脚本程序运行
2.1 启动计算机,在桌面双击图标THTJ-1,运行实验软件;
2.2 顺序点击虚拟示波器界面上的“开始采集”按钮和工具栏上的脚本编程器按钮;
2.3 在脚本编辑器窗口的文件菜单下点击“打开”按钮,并在“计算机控制算法VBS\ 计算机控制技术基础算法\数字PID 调器算法”文件夹下选中“位置式PID”脚本程序并打开,阅读、理解该程序,然后点击脚本编辑器窗口的调试菜单下“步长设置”,将脚本算法的运行步长设为100ms;
2.4 点击脚本编辑器窗口的调试菜单下“启动”;用虚拟示波器观察图4-2 输出端的响应曲线;
2.5 点击脚本编辑器的调试菜单下“停止”,利用扩充响应曲线法(参考本实验附录4)整定PID控制器的P、I、D及系统采样时间Ts等参数,然后再运行。在整定过程中注意观察参数的变化对系统动态性能的影响;
2.6 参考步骤2.4、2.4和2.5,用同样的方法分别运行增量式PID和积分分离PID脚本程序,并整定PID控制器的P、I、D及系统采样时间Ts等参数,然后观察参数的变化对系统动态性能的影响。另外在积分分离PID程序运行过程中,注意不同的分离阈值tem对系统动态性能的影响;
2.7 实验结束后,关闭脚本编辑器窗口,退出实验软件。
五、实验原理
1.被控对象的模拟与计算机闭环控制系统的构成

图中信号的离散化通过数据采集卡的采样开关来实现。
被控对象的传递函数为:

它的模拟电路图如下图所示
2.常规PID控制算法
常规PID控制位置式算法为

对应的Z传递函数为

其增量形式为

3.积分分离PID控制算法
系统中引入的积分分离算法时,积分分离PID算法要设置分离阈E0:
当 │e(kT)│≤│E0│时,采用PID控制,以保持系统的控制精度。
当 │e(kT)│>│E0│时,采用PD控制,可使δp减小。积分分离PID控制算法为:

式中Ke称为逻辑系数:
当 │e(k)│≤│E0│时, Ke=1
当│e(k)│>│E0│时, Ke=0
对应的控制方框图为

图中信号的离散化是由数据采集卡的采样开关来实现。
4.数字PID控制器的参数整定
在模拟控制系统中,参数整定的方法较多,常用的实验整定法有:临界比例度法、阶跃响应曲线法、试凑法等。数字控制器参数的整定也可采用类似的方法,如扩充的临界比例度法、扩充的阶跃响应曲线法、试凑法等。下面简要介绍扩充阶跃响应曲线法。
扩充阶跃响应曲线法只适合于含多个惯性环节的自平衡系统。用扩充阶跃响应曲线法整定PID参数的步骤如下:
① 数字控制器不接入控制系统,让系统处于开环工作状态下,将被调量调节到给定值附近,并使之稳定下来。
② 记录被调量在阶跃输入下的整个变化过程
③ 在曲线最大斜率处作切线,求得滞后时间τ和被控对象时间常数Tx,以及它们的比值Tx/τ,然后查课本表确定控制器的KP、Ki、Kd及采样周期T。
扩充阶跃响应曲线法通过测取响应曲线的τ、Tx参数获得一个初步的PID控制参数,然后在此基础上通过部分参数的调节(试凑)使系统获得满意的控制性能。
六、调试过程
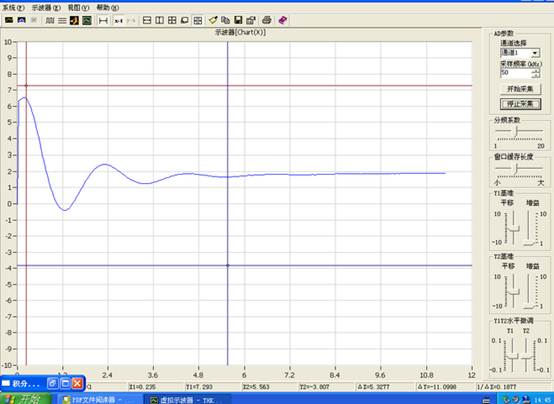
去掉积分作用和微分作用,只保留比例作用,逐渐减小比例度,直到系统发生持续等幅振荡,如图所示

图 6-1
由图可得使系统发生振荡的临界比例度为1/2.314
系统的临界振荡周期为1.438
选取控制度为1.05进行参数整定:
根据1.05控制度计算得参数如下:

a. 采用PID结构,根据参数计算得出参数有如下波形:
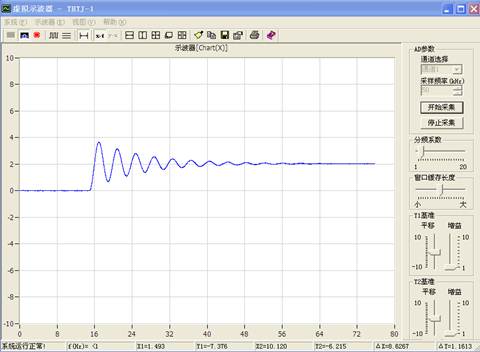
图 6-2
b. 对参数进行微调,保持其他值不变,将Ti都值变为2.0,有如下波形,可看出反应响应变慢,但是静差变小。
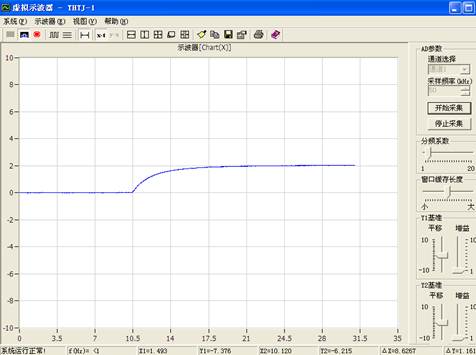
图 6-3
c. 继续不断微调各参数,得出如下图6-4与图6-5两个波形,最终结构选取了图6-5波形的参数,达到要求的结果,反应快,超调小,无静差。
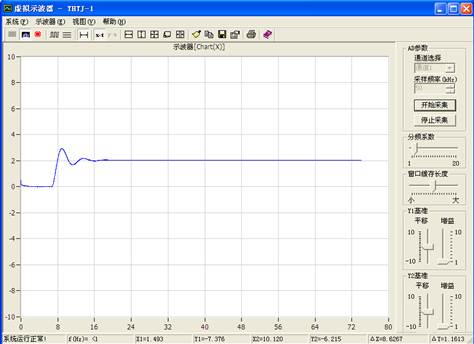
图 6-4
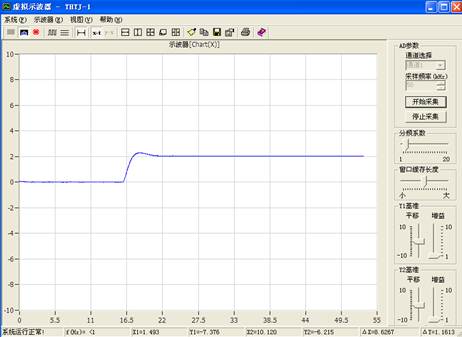
图 6-5
d. 采用积分分离算法波形如 图6-6所示:
带积分分离的PID算法的特点是:偏差e(k)较大时,取消积分作用;当偏差e(k)较小时才将积分作用投入;其应用场合:当有较大的扰动或大幅度改变给定值采用积分分离措施。