实训名称:
含水率测定试验 实验目的
是风干土样水分的测定,是各项分析结果计算的基础。
土壤含水量的测定方法很多,如烘干法、酒精燃烧法和中子测量法等,其中烘干法是目前国际上土壤水分测定的标准方法,虽然需要采集土样,并且干燥时间较长但是因为它比较准确,且便于大批测定,故为常用的方法。
将土壤样品放在105℃±2℃的烘箱中烘至恒重,求出土壤失水重量占烘干重量的百分数。在此温度下,包括吸湿水(土粒表面从空气中吸取活动力强的水汽分子而成的一种水分)在内的所有水分烘掉,而一般土壤有机质不致分解。 实验器材
铝盒、烘箱、干燥器、天平、土钻、小刀。 实验步骤
实训数据记录:
土壤含水量w(%)=100?(B-C)÷(C-A) 式中:A — 铝盒重(g)
B — 铝盒加湿土重(g) C — 铝盒加烘干土重(g) 即:土壤含水量%=(湿土重—干土重)/干土重*100
1
2
实训名称:
土的颗粒级配的测定试验 实验目的
通过筛分法测定土的颗粒级配,判定土的搭配情况是否良好
一般土的粒径小于60mm大于0.075mm,采用筛分法。通过筛分,称出留在各筛上的土重,算出各筛的筛余率,以及各筛的累积筛余率,描绘出颗粒级配曲线。
实验器材
烘箱(能使温度控制在105℃±5℃) 天平 标准筛 筛析机 毛刷 搪瓷盘 铲子 实验步骤
实训数据记录:
3
找出d10 d60 d30
计算:不均匀系数:Cu=d60/d10
曲率系数: Cc=d302/(d10?d60)
成果判定:
根据质量比例判断是否为砂类土?说明理由
根据不均匀系数和曲率系数判断土级配是否良好?
4
实训名称:
界限含水量试验
实训目的:
细粒土由于含水量不同,分别处于流动状态、可塑状态、半固体状态和固体状态。液限是区分粘性土的可塑状态和流动状态的界限含水量;塑限是区分粘性土可塑状态与半固体状态的界限含水量。
测定土的液限时含水量,用以计算土的塑性指数和液性指数,作为粘土类土的分类以及估算地基土承载力等的一个依据;测定土的塑限,并与液限试验和含水量试验结合,来计算土的塑性指数和液性指数,作为粘性土的分类以及估算地基土承载力的一个依据。
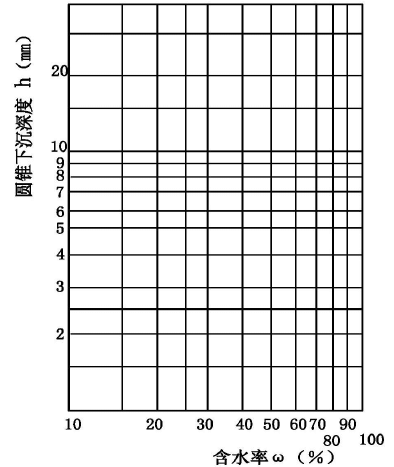
实训原理:
使用液、塑限联合测定仪将76g圆锥在5秒钟内入土深度为2mm时对应的含水率为塑限。100g圆锥联合测定仪法的液限含水率ωL与塑限入土深度hP经验关系式,由此关系式据ωL查hp,然后由圆锥入土深度与含水率的关系图查出塑限ωP。
主要实训仪器设备(包括名称、型号、规格):
1. 液、塑限联合测定仪:包括带标尺的圆锥仪、电磁铁、显示屏、控制开关;
2. 试样杯:直径40~50mm,高30~40mm;
3. 天平:称量200g,感量0.1g
4. 其他:烘箱、干燥器、铝盒、调土刀、孔径0.5mm的筛、凡士林等。
实训步骤:
5
实训数据记录:
实训结果分析:
实训结论:
6
实训名称:
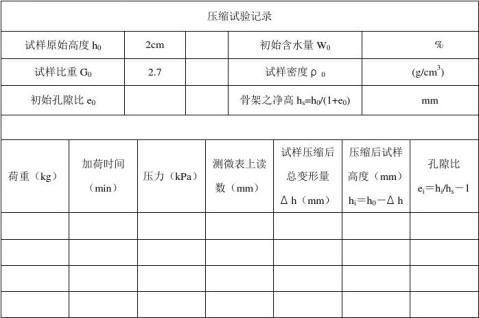
固结试验
实训目的:
土的压缩就是土在压力作用下体积逐渐缩小的过程,压缩试验是将土样放在金属容器内,在有侧限的条件下施加压力,观察在不同压力下的压缩变形量,测定土的压缩系数、压缩模量、固结系数等有关压缩性指标,了解土的压缩性,作为设计计算的依据。
实训原理:
土在外荷载作用下,水和空气逐渐被挤出,土骨架颗粒之间相互挤密,封闭气体的体积缩小,从而引起土的固结变形。
主要实训仪器设备(包括名称、型号、规格):
杠杆式压缩仪,包括加压及传压装置,压缩容器和百分表(精度0.01mm);
环刀,面积30cm2,高为2cm;
其它 烘箱、铝盒、切土刀、凡士林、滤纸、钟表等
实训步骤:
7
实训数据分析及结论:
e
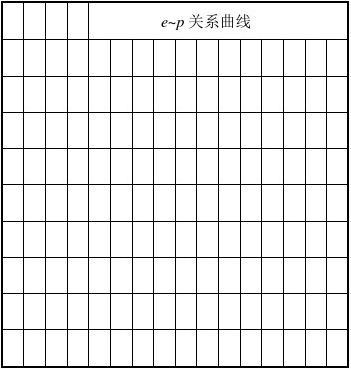
压缩系数
a 1-2-1 属 压缩性土
50 100 200 300 400 p(ka)
8
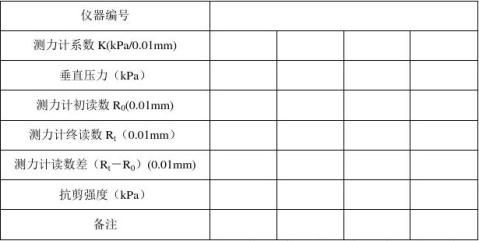
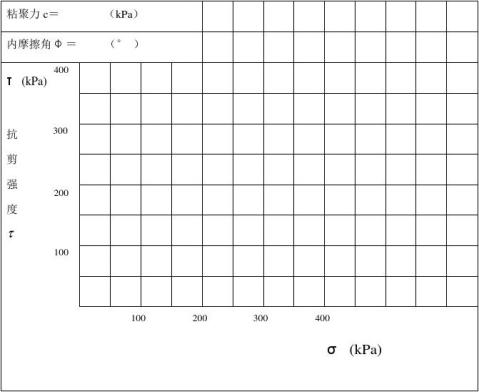
实训名称:
直接剪切试验
实训目的:
直接剪切试验是测定土的抗剪强度的一种常用方法。通常采用四个试样为一组,分别在不同的垂直压力σ下,施加水平剪应力进行剪切,求得破坏时的剪应力τ,然后根据库仑定律确定土的抗剪强度参数内摩擦角υ和凝聚力c 。直剪试验分为快剪(Q)、固结快剪(CQ)和慢剪(S)三种试验方法。 实训原理:
直接剪切试验的原理是根据库伦定律,土的内摩擦力与剪切面上的法向压力成正比,将同一种土制备成几个土样,分别在不同的法向压力下,沿固定的剪切面直接施加水平剪力,得其剪坏时剪应力,即为抗剪强度τf,然后根据剪切定律确定土的抗剪强度指标υ和c。
主要实训仪器设备(包括名称、型号、规格):
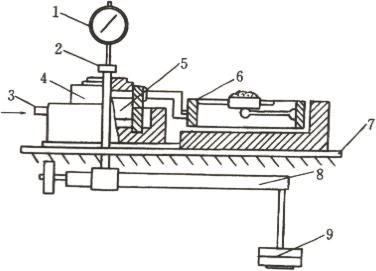
1.应变控制式直接剪切仪:如图1-1,包括剪力盒、垂直加压框架、测力计及推动机构等。
图1-1 应变控制式直剪仪结构示意图
1-垂直变形百分表;2-垂直加压框架;3-推动座;4-剪切
盒;5-试样;6-测力计;7-台板;8-杠杆;9-砝码
2.其它:环刀、量表、砝码、土等。
实训步骤:
9
实训数据记录:
实训数据分析及结论:
10
第二篇:实训报告内容
目 录
1机器人武术擂台赛项目竞赛规程概况· 1
1.1竞赛目的. 1
1.2 竞赛内容概述. 1
1.3 竞赛组别. 1
2场地和机器人· 2
2.1 比赛场地及道具. 2
2.1.1 场地、道具规格及说明. 2
2.1.2 场地示意图. 3
2.1.3 无差别组(含标准平台). 3
2.2 竞赛方式. 4
2.2.1无差别组上场规则. 4
2.2.2无差别组(含标准平台组)竞赛细则. 4
2.3 计分和胜负判定. 4
2.3.1 无差别组(含标准平台). 4
2.4 工作电源. 5
2.5感知系统. 5
2.5.1 红外接近传感器. 5
3.控制电机转动的部分程序· 6
总 结· 8
致 谢· 10
参考文献· 11
1.机器人武术擂台赛项目竞赛规程概况
1.1竞赛目的
本项赛事的目的在于促进智能机器人技术(尤其是自主识别、自主决策技术)的普及。参赛队需要在规则范围内以各自组装或者自制的自主机器人互相搏击,并争取在比赛中获胜,以对抗性竞技的形式来推动机器人技术在大学生、青少年中的普及与发展。
本项赛事未来的发展目标是:比赛中,两个使用双腿自主行走的仿人形机器人互相搏击并将对方打倒或者打下擂台。
1.2 竞赛内容概述
在指定的擂台上有双方机器人和5个中国象棋棋子。 双方机器人模拟中国传统擂台搏击的规则,互相击打或者推挤。如果一方机器人整体离开擂台区域或者不能再继续行动或被对方机器人有效击打次数达10次,则另一方获胜。如果双方均未离开擂台且都能自主移动,则在比赛时间结束后,推下擂台上象棋棋子数量多的一方获胜,否则双方判为平局。
本规则的原则是规定参赛队不能做的方面,即本规则没有明确禁止的做法均是允许的,除非技术委员会认为该事项可能危害人身安全和比赛过程的安全及公正。
1.3 竞赛组别
机器人武术擂台赛分为以下五个组别,其中1、2、3是不限定比赛平台,4、5是限定标准平台的竞赛。如任何参赛队对自身或其他队伍是否具备参加该组别的资格有争议,可在赛前提交技术委员会讨论裁定。
不限定平台赛种:
1) 无差别组
不限制参赛机器人结构形式,可以采用轮式、履带式、足式移动。
2) 仿人组
参赛机器人必须具备几个明显的仿人类特征,见本规则2.2节。
3) 技术挑战赛
技术挑战赛的内容原则上是未来将引入正式比赛的内容,也是本赛事规则发展的风向标。
标准平台赛种:
4) 无差别组标准平台
每个参赛机器人的任何部分都只能使用同一厂家提供的机器人套件中的部件完成,结构件只能使用塑料部件,例如创意之星机器人套件。其它规则与无差别组完全相同。
5) 仿人组标准平台
每个参赛机器人的任何部分(除电池之外)都只能使用同一厂家提供的机器人套件中的部件完成,例如乐高机器人套件。其它规则与仿人组完全相同。
2场地和机器人
2.1 比赛场地及道具
2.1.1 场地、道具规格及说明
1. 比赛场地(即擂台,如图1所示)大小为长、宽分别为是2400 mm,高150mm的正方形矮台,台上表面即为擂台场地。底色从外侧四角到中心分别为纯黑到纯白渐变的灰度。 场地的两个角落设有坡道,机器人从出发区启动后,沿着该坡道走上擂台。场地四周围700mm处有高500mm 的方形黑色围栏。比赛开始后, 围栏内区域不得有任何障碍物或人。
图2.1 擂台赛场地整体3D效果
2.出发区及坡道用正蓝色和正黄色颜色涂敷。出发区平地尺寸为300x400mm。
3.出发坡道水平长度为400mm,宽度为400mm,坡道顶端高度与擂台平齐,即150mm。
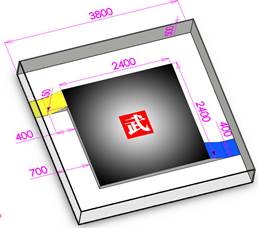
图2.2 主要尺寸
4.场地的材质为木质,场地表面最大承重能力50kg。场地表面的材料为亚光PVC膜,各种颜色和线条用计算机彩色喷绘的形式产生(提示:比赛承办单位因客观条件限制,提供的正式比赛场地可能色彩和材质与标准场地有出入)。建议各参赛队在官方讨论区下载标准图纸后自行制作(注意选择精度较高的“写真”,而不是布面料、精度较低的“喷绘”)。
5.象棋棋子的材质为松木,重约50~100g,直径70mm,高44mm的圆桶状(两个棋子粘连叠放高44mm),颜色为松木原色,字体颜色为红色。棋子外观如图3所示。比赛开始前,裁判会将5个棋子放在擂台对角线上间距大致相等的位置,如图4所示。


图2.3 象棋棋子示意图 图2.4 棋子摆放示意图
6.场地的照明与ROBOCUP类人组(KidSize)的竞赛要求相同:赛场的照度为600Lux到1200Lux之间,场地上各区域的照度应柔和均匀,各区域照度差不超过300Lux.实际的比赛场地四角会架设各2座20W、色温4000~6000K的节能灯,光源高度为2至2.5米之间。
2.1.2 场地示意图

图2.5 各部分功能示意图
2.1.3 无差别组(含标准平台)
参加无差别组竞赛的机器人,其结构形式不限。尺寸和重量限制条件如下:
1.每台机器人的参赛重量不得超过6kg;
2.机器人在出发区的投影尺寸不超过300x300mm的正方形, 高度不超过400mm。
3.机器人登上擂台后可以自主变形,不再受以上尺寸限制。变形过程不得由人工遥控。
2.2 竞赛方式
2.2.1无差别组上场规则
无差别组(含标准平台组)
1.裁判吹哨后,每队可启动第一台机器人从出发区出发登上擂台进行搏击,在第一台机器人登上擂台后的任意时间,每队可启动第二台机器人登上擂台参与搏击(台上每队同时出现最多有2台机器人,台上最多可能出现4台机器人,即允许出现1vs1、1vs2、2vs2对阵)。在已方的一台机器人被打下擂台后(掉下擂台的机器人在不影响场上比赛的情况下由边裁负责取出),方可启动下一台机器人登上擂台。
2.在整个参赛过程中每队可以使用最多4台机器人,但每局比赛的各方最多只能使用三个机器人。每场比赛的不同局,双方可以使用不同的机器人组合。每台机器人每局最多只能上台一次。
2.2.2无差别组(含标准平台组)竞赛细则
1.机器人出发地点:比赛开始前,各方参赛机器人应该位于比赛场地旁边各自的出发区,如图6所示。比赛开始10秒钟内第一台机器人必须完全登上擂台,否则该队将被判负。
2.比赛前裁判员需对双方机器人进行测量,确保各个机器人符合参赛要求。
3.本竞赛为团队比赛,每场比赛两队进行对抗。每队参赛选手3人,男女不限,设场上队长一名。比赛主裁判负责根据规则判断双方犯规、对规则进行合理的解释,并根据规则决定双方胜负。
4.采用分组小组赛+单循环淘汰赛方式,小组赛每组4-6支队伍,单循环比赛后根据积分出线进入淘汰赛。
5.本项目竞赛开始前,裁判长召集各队伍的领队或队长进行分组抽签,确定对阵形势。
6.双方机器人出场顺序由每场比赛前抛硬币决定。抛硬币获胜者将获得挑选场地的机会。
2.3 计分和胜负判定
出现有参赛队弃权、被裁判员直接判负、被裁判员取消本场比赛资格的,参赛的另一方获胜。
2.3.1 无差别组(含标准平台)
1.获胜和平局
a) 2分钟内,一方机器人把另一方的机器人推下去三台(包括分解的部分),可立即胜。
b) 2分钟内,一方机器人单独在台上超过10秒,可立即胜。(即另一方机器人全部被打下擂台,或者没有机器人登上擂台,或者一台机器人被打下擂台后,其它机器人没有登上擂台)。
c) 比赛时间结束后双方都有机器人留在台上,则胜负判断方法依次为:推下对方机器人多的一方胜;推下机器人数相同时,留在台上机器人多的一方胜;留在台上机器人数相同时,推下棋子数多的一方胜;推下棋子数也一样多,则留在台上的机器人重量总和轻的一方胜。
2.在小组赛中,胜一场得3分,平一场得1分,负一场得0分。积分相同的,以双方之间比赛的战绩决定双方名次。
2.4 工作电源
MultiFLEX?2‐PXA270 控制器内置一组7.2V 2.5Ah 的锂聚合物电池(如图6所示),内置8A 放电能力的充放电保护板。一般情况下使用电池供电。电池电量不足的情况下,可以使用直流稳压电源给控制器供电。

图2.6 锂聚合物电池
配置的直流稳压电源(如图7所示),输出为8V/5A,峰值电流可达8A。

图2.7 直流稳压电源
如果想要给机器人赋予人工智能的话就应该了解人的思考行为过程。同样如果想要给机器人赋予人工智能的话,机器人也应当经历类似的过程:通过传感器采集外部信息(图像、温度等),并且通过数据线将这些信息传递给机器人的“大脑”——中央处理器;处理器通过人们编写的程序根据外部采集的信息进行决策;然后处理器控制机器人的执行器(例如电机、舵机等)执行某种功能,以适应环境或者完成某种工作。这就是机器人的行为模式。
2.5感知系统
2.5.1 红外接近传感器
红外接近传感器的工作原理如图8所示。它的主要功能:确定擂台场地中敌人的位置。
红外接近传感器的是开关量传感器,接 IO0~IO11的任意一个接口都可以通过 NorthSTAR进行数值读取和编程。由于输出是开关量,只能判断在测量距离内有无障碍物,而不能给出障碍的实际距离。但是该传感器带有一个灵敏度调节旋钮,可以调节传感触发的距离。

图2.8 红外接近传感器工作原理

图2.9 红外接近传感器
3.控制电机转动的部分程序
#include <reg52.h>
sbit SPI_DI =P0^1; //MMC数据输入
sbit SPI_DO =P0^0;//MMC数据输出,可不接
sbit SPI_SCL=P0^2;//时钟线
void delay(unsigned int time)
{
while(time--);
}
void Write_Byte(unsigned char value)
//**********************************************************
******************
{
unsigned char i;
for (i=0;i<8;i++)
{
if (((value>>(7-i))&0x01)==0x01)
SPI_DI=1;
else SPI_DI=0;
SPI_SCL=0;
delay(5);
//必须要加延时,否则会因为操作太快而不响应。
SPI_SCL=1;
delay(5);
//必须要加延时,否则会因为操作太快而不响应。 /*
delay(5);
Write_Byte(0x51);// 设置第一通道频率寄存器
Write_Byte(49); //送入频率字,49为20hz.
/*
频率字的计算方法如下,不要看管方给的资料,否则计算错误:
设你想要的频率为F,频率字为FC则用以下公式计算
F*4=4000/(FC+1)
如:我想要20Hz,则20*4=4000/(FC+1)
求得:FC=49,
*/
Write_Byte(0x54);//设置第二通道
Write_Byte(0x80);
delay(5);
Write_Byte(0x55);
Write_Byte(24);
/*
第三通道固定为1Khz,怎么设置都改不过来,大家不要用第三通道了,就用第一二通道就足够了。*/
delay(50);
总 结
此次比赛,我参与了机器人小车的设计、制作和调试等工序和套件机器人的编程和调试等工序。从比赛前的设计到比赛中的调试和比赛后的总结,我都是全程参与,真是受益匪浅。
通过比赛,我建议比赛人员在出发前几天内要认真的对照必带工具和元件清单详细的检查所带的工具、元件和套件等重要物品。尽量带全在比赛当中所需要的东西,这样我们就可以避免必要物品忘带的尴尬场面。
首先,就机器人武术擂台赛无差别组的比赛我就浅谈几点:
由于各方面的制约,我们参赛人员要克服一些来自学校的困难,比如:由于资金不足,买不到好的元件和硬件等问题。还要克服其他参赛队给我们造成的压力。对与一些自身的困难是无条件的客服。
通过自己亲自制作机器人小车,我才发现我涉猎的书籍太少,知识面太窄,一直有好多困难。主要有:选材、小车的基本构造、造型、整体重心、各种尺寸、传感器的安放位置及角度、电源和主板及驱动板的安放位置、力部分的结构组成及工作原理、电源是否可以持续稳定的供电、各种期间的固定及连接、小车的行驶和转动系的问题等。
要解决以上这些问题,必须要涉猎关于力学、材料、驱动、车体造型,传感器等学科的书籍。
在比赛过程中,从总体上来说虽然有点失败,但对我来说,失败比成功学到的东西要多得多。因此我从失败中总结了几点:
首先,为什么我们在比赛前一个小时,机器人小车出现了无法启动的问题或启动后不能正常运转的问题?原因有这么几点:
1、在设计电路板的时候可能把一些必要地元件没有考虑进去导致继电器被烧,或者把某一个元件的正负极接反导致有些元件没有功能,或者在电路板和电源的安放上有问题,可能出现了挤压和反装的情况;
2、当出现程序下载不到芯片的情况时,首先要考虑程序的编译情况,当编译没有问题时就考虑芯片是否完好,还要考虑数据线与芯片和电脑的连接情况,最后考虑下载线是否完好及下载环境的问题;
3、有时候小车在启动后不动了,有可能是什么东西把车轮缠住或卡住了,或者是电源接触不良;
4、查看在搬运过程中,是否有挤压的情况;
5、检测软启动是否可以实现功能,检测探头的好坏;
在制作机器人小车之前或制作的同时要涉猎C语言编程、汇编语言、单片机教程、一些专用软件、Protel软件等知识。
其次,在比赛过程中,要做到眼观六路,耳听八方,也就是说上场的队员要反应快,做到不失去赛场上的各种时机。要学会与队友之间密切的配合,这样才能赢得比赛。队友之间的配合在整个比赛当中起到的作用不比电机的低,所以在组队的时候要慎重考虑人员的搭配。
每个队的队员在软硬件上都要好,只是偏向的重点不同罢了,如果只懂得一方面,队员之间就不可能配合。
最后,在比赛前一段时间内,必须认真、仔细的阅读比赛规则,查找漏洞,给自己赢得机会。这其实是很重要的一点。还有就是在看完比赛规则后紧接着仔细的观看前几次比赛的所有视屏及每一辆机器人小车的造型和动作特点,以便在编程时有的放矢。我们也可以根据不同的车编写不同的程序。
在以后多对多的情况下,最好的办法是多车上台后可以实现合体,这样的话车的体积、重量、力量等可以变为单个机器人小车的两倍或者几倍。但合体比较困难,比起两辆车实现通信功能就简单得多了。
通过参加机器人武术擂台赛仿人组标准平台的比赛,我最有感触的是,以后的机器人,不管是哪一种都需要标准的配件平台,所以这就是一个机器人的发展趋势。但对于我来说,参加前一个分赛种学到的东西要比这个赛种多好几倍。
就这个比赛而言,硬件老是出问题,对队员的耐性是一种极大的挑战,好多参赛队员对这种具有挑战性的比赛做的不是很到位。
在比赛当中,有这么几点要注意:
1、标准平台的比赛必须要按照比赛规则进行设计机器人的外观,用现有的套件进行组装,但我觉得这样有一定的局限性,如果能让队员自己设计套件,再进行组装,我想这样可以丰富机器人的发展方向。但这只不过是我自己的一种想法罢了!
2、因为套件机器人要实现抱起柱子这一动作,所以必须要注意机器人的整体重心问题,尽量把重心下移,这样就会避免机器人在抱起柱子的时候由于重心后移而摔倒在地,这一点对比赛有很大的影响。
3、在比赛前还要注意电源的充电问题,在上场前必须充满电,但在比赛前必须释放适量的电量,至于释放多少是好,只有实际操作了才会知道。因为机器人只有在电量不大不小的情况下才能稳定的运行,这一点对套件机器人在比赛中冲锋陷阵很重要。
4、还有传感器的安装和安装位置问题,这一点也很重要,因为传感器就相当于机器人的眼睛,必须让它的观测范围最大化。
5、什么位置选择哪种传感器就显得更重要了。需要队员的深入研究,前提是参赛者要把各种传感器的功能了如指掌。
其实,心态也是一个不能被忽略的必要条件,一个人的心态有时候会影响告所有参赛者的心情。第一个参赛队的比赛结果对其他几个参赛队的后续比赛会造成一定的影响,所以首先参赛的参赛队务必要赢得比赛,为后续参赛队给点信心。
致 谢
在此,首先我要感谢董老师能给我这次锻炼和提高自己的机会,教我在电子电路方面的常识。其次,我要感谢王俊和易晓东两位搭档,在调试机器人的一段时间里,我和两位搭档精诚合作,非常默契,是他们让我懂得了好的配合才是硬道理。在今后的时间里,我会好好的学习电路和编程方面的知识,努力实践。
由于时间匆忙,所想所写定有不足之处,希望老师指正。
最后,我要再次感谢董老师的耐心教导和全力支持,感谢两位搭档的默契配合!
参考文献
[1]北京博创科技公司《创意之星实验指导书》。
[2]丁学恭.机器人控制研究,浙江大学出版社。
[3]金文俊,冯浩,华亮.基于超声波传感器的自主移动机器人的探测系统,现代电子技术。
[4]张云洲,吴成东,薛定宇,王斐.自主移动机器人嵌入式控制系统研究,东北大学学报(自然科学版)。