课程设计
课程名称: 误差理论与测量平差基础
学 院: 矿业学院 专 业: 测绘工程
姓 名: 兰明鹏 学 号: 1108010230
年 级:测绘111 任课教师: 张俊
20##年 07 月 16 日
误差理论与测量平差基础课程设计任务书
一、 设计性质、目的和任务
《误差理论与测量平差基础》是一门理论与实践并重的课程,该课程设计是测量数据处理理论学习的一个重要的实践环节,它是在学生学习了专业基础课“误差理论与测量平差基础”课程后进行的一门实践课程。其目的是增强学生对误差理论与测量平差基础理论的理解,牢固掌握测量平差的基本原理和基本公式,熟悉测量数据处理的基本技能和计算方法,灵活准确地应用于解决各类数据处理的实际问题,并能用所学的计算机理论知识,编制简单的计算程序或借助常用软件,如MATLAB、Excel等解决测绘数据处理问题,从而为将来走向工作岗位,进行工程实测数据资料的处理打下基础。
二、设计内容和重点
根据上述的目的和任务,本课程设计主要是要求学生完成一个综合性的平面控制网的平差处理问题,如目前生产实践中经常用到测角网严密平差及精度评定,通过此次课程设计,重点培养学生正确应用公式、综合分析和解决问题的能力,以及借助计算机解决实际问题的能力。具体内容如下:
根据题目要求,正确应用平差模型列出观测方程和误差方程、法方程并解算法方程,得出平差后的未知点坐标平差值、点位中误差、在控制网图上按比例画出误差椭圆。
三、设计要求
总体要求:课程设计必须体现平差过程,每一步不得直接给出结果,课程设计过程中如有问题,可以向指导老师请教或同学之间讨论解决,但不得相互抄袭,必须独立完成。具体要求如下:
1. 设计说明书必须严格按照贵州大学矿业学院课程设计格式要求进行认真、按时撰写完成(课程设计截止时间:20##年6月17日-20##年7月5日)。
2. 完成课程设计报告一份,报告中必须包括以下内容:
1) 近似坐标计算过程
2) 误差方程系数计算过程(可自行绘制表格,并辅以文字计算说明)。
3) 法方程的建立过程。
4) 权的确定。
5) 必须求出所有待定点坐标平差值、所有角度观测值的平差值
6) 计算所有未知点的点位中误差,绘制控制网略图,并在相应未知点上绘制点位误差椭圆。
3. 报告中必须附有以下打印资料:
1) 误差方程系数阵
2) 法矩阵的逆矩阵
3) 权阵(本例权阵为单位阵,无需附)
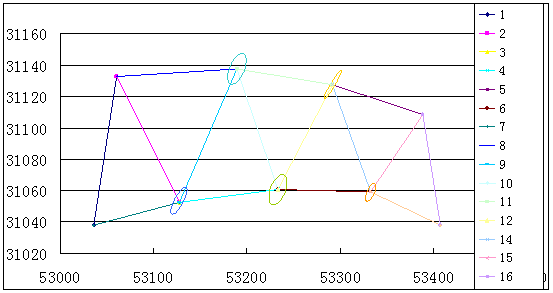
4) 控制网略图及未知点的误差椭圆
5) 平差成果(包括精度评定结果)
6) 参数平差值的协因数阵
4. 本次课程设总结或心得体会
5. 本次课程设计需提交资料
课程设计报告纸质文档和电子文档各一份(电子文档一律提交word2003版,且文档需有目录)(封面不必彩色打印)
四、设计数据
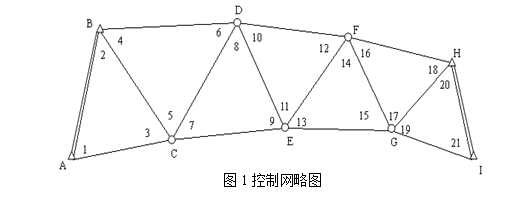
表1 已知点坐标数据

表2 观测数据
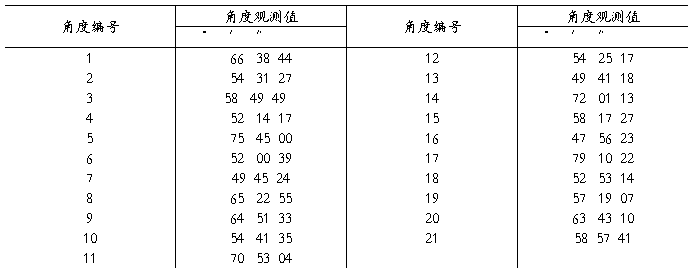
图1 为一三角网,网中共有控制点9个,其中A、B、I、H均为已知控制点,其坐标列于表1。C、D、E、F、G为未知点;同精度独立观测了网中所有角度,共有观测角度21个,观测角值列于表2。要求通过测量平差(平差方法不限),完成任务书中第三款中各项设计要求的内容。
目录
摘要. 7
一、根据余切公式:求出未知点的近似坐标。. 8
二、平差值计算:. 9
1、误差方程:. 9
2、误差方程常数计算表: 12
3、法方程与改正数的计算及平差值. 14
4、未知点坐标平差值表:. 15
三、未知点点位中误差计算. 15
四、误差椭圆. 16
附录: 17
误差方程系数阵: 17
摘要
The main content of the course design is to require students to complete a comprehensive of plane control network adjustment problem, such as goniometric network is often used in the production practice of strict adjustment and precision evaluation, through this course design, focus on training students correct application formula, comprehensive analysis and problem solving skills, and ability to solve practical problems with the help of computer. Is the indirect adjustment method, will stay fixed-point C, D, E, F, G adjustment value set to the coordinates of the unknown parameters, and according to the geometric relationship of the mathematical model of the listed measurements error equation, equation based on the principle of indirect balancing method and the method of the coefficient matrix, the unknown parameters, the corrected number of the observed value then we assessed the accuracy, draw
the error ellipse, curriculum design task。
一、根据余切公式:求出未知点的近似坐标。
XCº=(XA.cotL2+XB.cotLA-(YB-YA))/(cotL1+cotL2)
YCº=(YA.cotL2+YB.cotLA+(XB-XA))/(cotL1+cotL2)
XDº=(XB.cotL5+XC.cotL4+(YC-YB))/(cotL4+cotL5)
YDº=(YB.cotL5+YC.cotL4+(XC-XB))/(cotL4+cotL5)
XEº=(XD.cot72+XC.cotL8+(YC-YD))/(cotL7+cotL8)
YEº=(YD.cotL7+YC.cotL8-(XC-XD))/(cotL7+cotL8)
XFº=(XD.cotL11+XE.cotL10+(YE-YD))/(cotL11+cotL10)
YFº=(YD.cotL11+YE.cotL10-(XE-XE))/(cotL11+cotL10)
XGº=(XF.cotL13+XE.cotL14+(YB-YA))/(cotL13+cotL14)

YGº=(YF.cotL13+YE.cotL14-(XB-XA))/(cotL13+cotL14)
二、平差值计算:
1、误差方程:
坐标方位角改正数系数表:
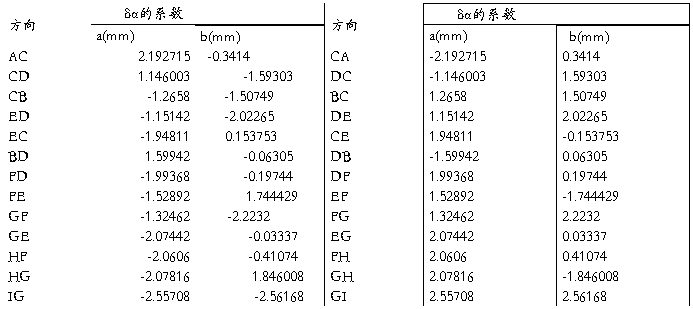
根据δαjk=ajk.xj^+bj.yj^-ajk.xk^-bjk.yk^, vi=δαjk-δαjh-li 写出误差方程:
v1=﹣2.192715xc^+0.341395yc^-0
v2=1.2658xc^+1.507492yc^-0
v3=0.926912xc^-1.84889yc^-0
v4=﹣1.2658xc^-1.507492yc^+1.59942xd^-0.063048yd^-0
v5=2.411807xc^-0.08554 yc^-1.146003xd^+1.593033yd^-0
v6=﹣1.146003xc^+1.593033yc^-0.45342xd^-1.52998yd^+4
v7=0.802104xc^+1.43928yc^+1.146003xd^-1.593033yd^-1.94811xe^+0.15375ye^-0
v8=1.146003xc^-1.593033yc^-2.29743xd^-0.42962yd^+1.15142xe^+2.022654ye^-0
v9=-1.94811xc^+0.153753yc^+1.15142xd^+2.02265yd^+0.796684xe^-2.17641ye^+8
v10=-0.84226xd^+1.825217yd^-1.15142xe^-2.02265ye^+1.99368xf^+0.19744yf^-0
v11=-1.15142xd^-2.02265yd^+2.68034xe^+0.278225ye^-1.52892xf^+1.744429yf^-0
v12=1.99368xd^+0.19744yd^-1.52892xe^+1.744429ye^-0.46476xf^-1.94187yf^+4
v13=0.545503xe^+1.777795ye^+1.52892xf^-1.744429yf^-2.07442xg^-0.03337yg^-0
v14=1.52892xe^-1.744429ye^-2.85353xf^-0.47877yf^+1.32462xg^+2.2232yg^-0
v15=-2.07442xe^-0.03337ye^+1.32462xf^+2.2232yf^+0.7498xg^-2.18984yg^+2
v16=-0.73598xf^+1.81246yf^-1.32462xg^-2.2232yg^-0
v17=3.402778xg^+0.377196yg^-1.32462xf^-2.2232yf^-0
v18=2.0606xf^+0.41074yf^-2.07816xg^+1.846008yg^+1
v19=0.478924xg^+2.564977yg^-0
v20=2.07816xg^-1.846008yg^-0
v21=-2.55708xg^-2.56168yg^+2
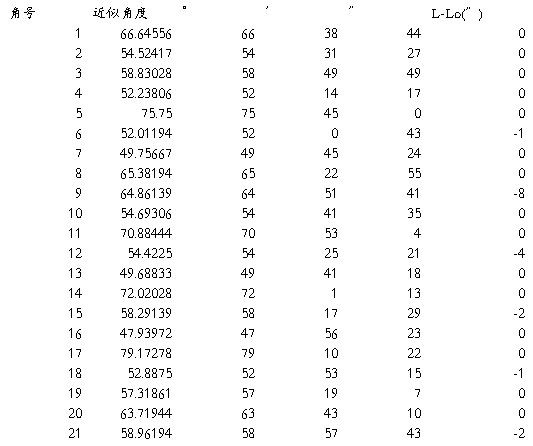
2、误差方程常数计算表:
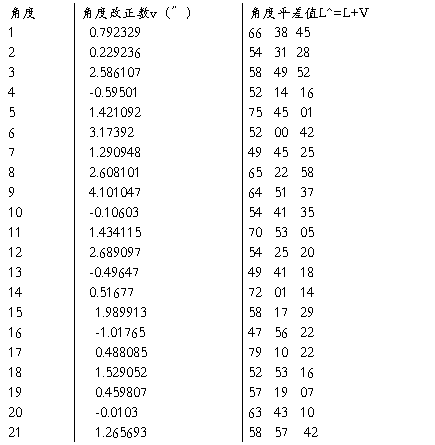
3、法方程与改正数的计算及平差值
法方程:NBBx^-W=0
由x^=NBB-1 W,v=Bx^-ι解算v,如下表:
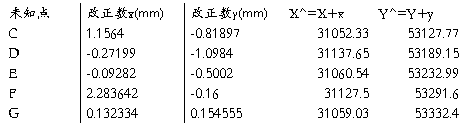
4、未知点坐标平差值表:
三、未知点点位中误差计算
б0^=(VTV/n-t)^(1/2)= 2.417751″
бxc^=б0^*(Qxcxc^(1/2))= 0.867327 бyc^=б0^*(Qycyc^(1/2))= 0.763243
бxd^=б0^*(Qxdxd^(1/2))= 0.997311 бyd^=б0^*(Qydyd^(1/2))= 0.937594
бxe^=б0^.(Qxexe^(1/2))= 0.974781 бye^=б0^.(Qyeye^(1/2))= 0.946551
бxf^=б0^.(Qxfxf^(1/2))= 0.892442 бyf^=б0^.(Qyfyf^(1/2))= 0.755897
бxg^=б0^.(Qxgxg^(1/2))= 0.571672 бyg^=б0^.(Qygyg^(1/2))= 0.519208
四、误差椭圆
附录:
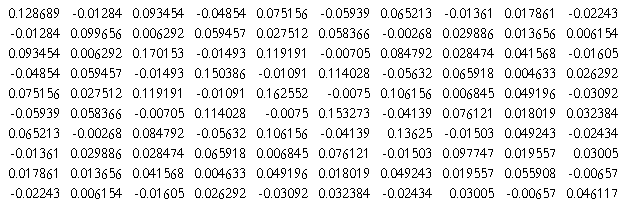
误差方程系数阵:
B
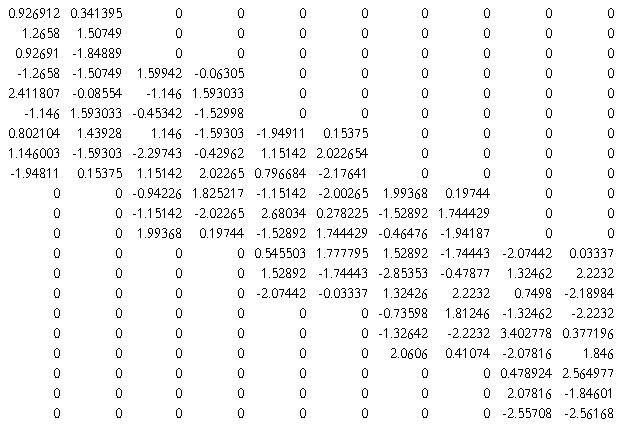
QX^X^=NBB-1