摘要
由于振动磨机是一个集弹性体、离散体、非线性支承和无限自由度的复杂的振动系统,所以提高其自动化控制程度很有意义。振动磨机负荷控制目的就是在保证磨机稳定运行的条件下尽量提高磨机生产效率。针对磨机具有延迟、非线性、不确定性等特点,本文设计了单变量输入-输出二维模糊控制器。由于经典模糊控制设计方法存在很大的主观性、随意性,随着模糊逻辑和模糊控制的飞速发展,模糊规则的提取成为模糊技术应用的一个关键.由于人工总结规则存在不少困难,因此模糊规则自动生成方法的研究越来越引起人们的注意,其中一个活跃的研究方向是利用模糊神经网络来学习模糊规则。模糊神经网络是由神经网络与模糊逻辑相结合构成的.它既继承了神经网络的自学习、自组织、自适应和自调整能力,又具备了模糊逻辑表达人类高层归纳性知识的能力,因而比其他方法更适于模糊规则的自动学习。本文采用将神经网络与模糊控制相结合的方法,并使用T-S模型的神经网络进行优化,并用MATLAB对所设计的模糊控制器进行了仿真,研究表明:与人工控制的振动磨机相比采用模糊神经网络控制的振动磨机在自动化控制、系统稳定性、生产效率方面都有了很大的提高,使系统获得最佳的控制效果。
关键词:模糊控制器,T-S模型,振动磨机,神经网络
Abstract
The vibration mill is a complex vibrating system which is made up of a collection of elastomer ,diserete body,non-linear bearing and infinte degree-of-freedom .as the rapid development of fuzzy logic and fuzzy control,the extraction of fuzzy rules becomes an important step for the appliction of fuzzy technology.become there exist many difficulties about summarizing rules by human,people have paid more and more intrest in the researches for the fuzzy rulesautomatic generating methods.among those method,an effective one is using fuzzy neura network to learn fuzzy rule .fuzzy neural network,which is combined of the ideas of neural network and fuzzy logic,inherits not self-learning,self-organing,self-adpting and self-learning,but also the fuzzy logic’s ability of expressing human’s advanced summarizing knowledge.therefore it is more suitable for learning fuzzy rules than the other methods.this paper adopt neural network with the method of combining the fuzzy control, and use T-S model of neural network optimization, with MATLAB the design of fuzzy controller is simulated,studies show that the vibration of the manual control grinding machine adopts the fuzzy neural network control compared the vibration grinding machine in automatic control,the system stability,production efficiency had the very big enhancement,make the system to get the best control effect.
KeyWords:Fuzzy control, T-S model , vibration mill ,neural network
目录
摘要………………………………………………………………1
ABSTRACT……………………………………………………...2
目录………………………………………………………………3
第一章 绪论
1.1振动磨机国内外研发进展……………………………..4
1.2模糊控制的产生与发展………………………………..6
1.3神经网络的发展与研究现状…………………………..9
第二章 振动磨机的控制参数分析
2.1振动磨机原理…………………………………………..10
2.2振动磨机动力学分析…………………………………..12
2.3影响振动粉磨过程的基本因素………………………..15
第三章 振动磨机模糊控制器
3.1引言……………………………………………………..20
3.2模糊控制原理…………………………………………..20
3.3模糊控制器的组成……………………………………..21
3.4模糊控制器的结构……………………………………..23
3.5振动磨机模糊控制框图………………………………..24
3.6模糊控制器设计………………………………………..25
3.7对模糊控制器进行仿真………………………………..30
第四章 神经网络实现模糊控制
4.1引言……………………………………………………..33
4.2神经元与网络结构……………………………………..34
4.3模糊神经网络结构……………………………………..39
4.4T-S模糊系统…………………………………………….40
4.5用自适应神经模糊推理系统编辑器进行优化………..42
4.6
第五章 总结……………………………………………………..
参考文献…………………………………………………………
致谢………………………………………………………………
1 绪论
1.1振动磨机国内外研发进展
振动磨机是一种机械式粉碎设备,通过磨介(磨筒内的一些促使和加快物料破碎的介质)对物料施加强烈的冲击、摩擦、剪切、挤压等作用,使被加工料达到断裂、粉碎、细化、混合等目的。振动磨机的发展可以分为萌芽和设想从振动筛到振动磨机的探索、工业应用与推广、新开拓和新发展等四个阶段‘川。20纪40年代德国Siebtechnik公司才造出第一台振动磨机,为单筒体结构,容积0.6L,采用间歇式碎磨方式。20纪50~60年代,振动磨机发展为多筒式,其结构几乎包括2~6筒体的所有布形式,设备最大容积也突破了1000L。1962年,国KHD、wEUAG公司研制65U型以偏心体作激振器的振动磨机,是当时生产能力最大的机型,有效容积到Z000L,以产品细度43林m(325目)计的台时产量达2.5t瓜。这种由机驱动偏心块高速旋转带动磨筒振动的激振方式,后来为各国所效仿。到70年代,德国产各种型号振动磨机己经定型,广泛用于矿物粉碎的许多领域,当的振动磨机的主要型号有:
1)VAR10型振动磨机,采用多筒式,并采用双电机驱动;
2)AUBEMA型振动磨机,为斜式双筒振动磨机,振动强度为7g;
3)PALLA型振动磨机,是垂直双筒型,单电机长轴驱动激振器,振动强度可达6一89如图1.1所示;
4)RSM型振动磨机,为四筒式,单电机长轴驱动激振器。美国ALLIS一CHAIMERS公司在50年代中期研制的CHLMERS型单筒振动磨机,采用双电机驱动,最大容积可达88OL,在美国得到广泛的应用。后来又相继制造了Vibrat。型振动磨机。
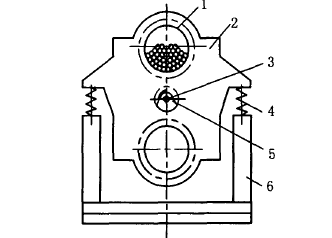
图1-1 PALLA型振动磨机结构示意图
1筒体2.支承板3.主轴4.隔振弹簧5.偏心块6.机座
日本大约在20世纪60年代前后才开始引进前西德筛分公司、美国阿里斯一查莫斯以及英国PODMORE一BOULTONG等公司的产品,但是发展迅速。其在引进的同时非常注重对原产品的改进,并融入了自己创造发明,研制出了一批新产品。日本现有中央化工机械、安川电机和川崎重工等较大的振动磨机制造商,能提供试验研究用的小型号和各种生产规模的多种型号磨机,如CKC型、CH型、RSM型等,其种类比较齐全,可针对不同性质的物料来选工艺参数。另外在设备的传动、隔振、消音、冷却等诸方面都有不少特点,助配套设备也比较完善,质量和市场至今仍处于领先地位。总之,国外从19世纪40年代第一台振动磨机投入市场以来,经过六十多年的不断改进,振动磨机的研发能力己达到相当高的水平。筒体容积最大可达3000L,结构也从单筒发展到六筒不等,振动强度可达6一149(g为重力加速度),入料粒度最大达30mm,产量最大达50t/h,产品也基本系列化,能够碎磨百余种物料。进入七、八十年代以来,由于电子计算机的应用,设计、试验、检测手段的完善,新材料新工艺的发展,国外振动磨机已经向大型化、成套化、自动化和高振动强度方向稳步发展。
我国振动磨机的研制起步比较晚,于60年代初期才开始,即有原北京水泥研究院设专题开始研究,70年代末期才开始试制。期间,王树林教授等人注重于增强磨内介质的正向挤压碰撞作用,认为增大振幅可有效地提高介质的能量传递接触面积和正向挤压碰撞能量,从而有利于提高碎磨效率,并按照低频大振幅设计原则,以队LLA型振动磨机为基础,研制出MGZ一1型振动磨机,如图 1.2所示。此后,西安理工大学振动研磨技术中心郭天德教授〔川在分析国内外振动磨机的基础上,采用三维动力有限元法对磨机结构进行了三维振型分析,实现了对磨机的振动参数控制,研制出我国第一台双电机驱动同步激振超细振动磨机。

图1-2 MGZ-1 型振动磨机示意图
1电机2.进料口3.出料口4.主轴5.筒体6.激振体7.底座
纵观各国振动磨机的发展,型号种类不断增多,结构不断出新。然而其振动强度参数始终偏低,振幅也仅限于 smm一巧mm之间。单机的碎磨能力偏低能耗过大,多适用于一定规模的细磨和超细磨生产,对具有相当生产规模的碎磨工程却缺乏广义上的配套能力,这就迫切需要从理论上充分掌握磨机碎磨机理,进而指导新型、高效振动磨机的研发。
1.2模糊控制的产生与发展
1.2.1模糊控制理论的产生
自控制理论创立以来,传统控制理论经过了两个主要发展阶段:经典控制理论和现代控制理论。经典控制理论主要解决了单变量系统的反馈控制问题,而现代控制理论主要解决了多变量系统的优化控制问题。传统控制理论是建立在被控对象精确数学模型的基础之上的,一般来说,过程描述越精确,控制效果就越好。
传统控制理论在工业生产、军事科学、空间技术等领域取得了许多成功的应用。但随着科学技术和生产力的不断发展,实际的被控对象越来越复杂,主要表现为如下一些特征:
1)复杂性:系统的结构和参数具有高维性、时变性和高度非线性,并且具有强耦合与时滞等特性;
2)不确定性:系统及其外部环境具有许多未知和不确定的因素,具有较大的随机干扰;
3)信息量少:为了实现系统的精确控制,需要了解系统大量的信息,但实际中从系统对象所获得的信息量相对较少;
4)高标准的性能要求:由于系统复杂,导致了控制目标的多样性和各个控制目标之间的矛盾,控制器的设计往往要综合考虑相互矛盾的各个因素。
诸如此类的复杂系统,由于无法建立系统的精确数学模型,从而使得传统控制理论很难给出一个较好的控制效果,甚至不能控制。但在另一方面,人们在不知道系统精确模型的情况下,依赖自己的经验和专家知识,往往能够实现对此类复杂系统的良好控制,许多难以实现自动化的复杂工业过程正是依靠这种人工调节控制而维持正常运转的。人类在处理复杂系统及模糊信息方面表现出来的惊人能力使得专家们试图吸取人脑结构特征和思维特点,以形成对复杂系统的简单灵活的控制,模糊控制就是在此背景下产生的。
为了运用数学方法描述和处理自然界中的不精确、不完整信息,1965 年美国著名控制论学者 L.A.Zadeh 发表了具有开创性意义的“Fuzzy Set”一文,提出了模糊理论。模糊理论是建立在模糊集合和模糊逻辑的基础上,通过引入隶属函数的概念来描述那些介于属于和不属于之间的过渡过程。它打破了分明集中的 0-1 的界限,为描述模糊信息、处理模糊现象提供了数学工具,在经典数学和充满模糊性的现实世界之间架起了一座桥梁。
1.2.2 模糊控制理论的发展概况
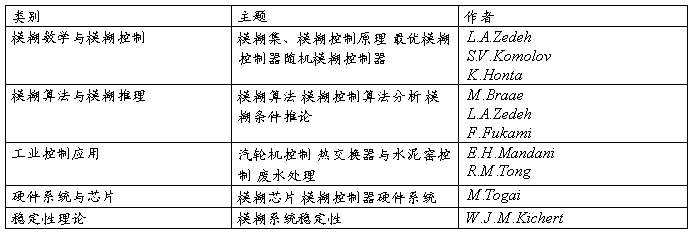
模糊理论的产生为模糊控制的发展奠定了基础。L.A. Zedeh 在提出模糊理论之后,又接着提出了模糊控制的概念和原理,开启了模糊控制的先河。在此后的三十年,模糊控制无论在理论研究方面还是技术应用方面都得到了迅速发展。近年来在模糊控制
理论与算法、模糊推理、工业控制应用、稳定性研究和鲁棒控制的研究成果可归结为表 1-1。
表 1-1:模糊控制系统部分研究成果
1.2.3 模糊控制的研究成果
模糊理论的提出与模糊控制的应用在时间上有一定的距离。 在 1964 年提出了模糊理论之后,于 1972 年将该理论与控制技术结合起来,提出了模糊控制的概念和原理。而模糊控制的最早应用是在 1974 年,英国伦敦大学
在 1964 年提出了模糊理论之后,于 1972 年将该理论与控制技术结合起来,提出了模糊控制的概念和原理。而模糊控制的最早应用是在 1974 年,英国伦敦大学 利用模糊控制语句构成模糊控制器,首次将模糊控制理论应用于蒸汽机及锅炉的控制中,取得了优于常规调节器的控制品质开启了模糊控制在工程上获得成功应用的先河,此后,在日本和西欧等发达国家相继出现了将模糊控制技术应用于温度、热水装置、压力与液面等控制系统中。1979 年英国的I.J.Procyk和E.H.Mandani提出了一种自组织模糊控制器,可以在控制过程中不断修改和调整控制规则,使控制系统不断完善,提高了模糊控制的智能化程度。模糊控制系统的大规模应用发生在日本。上世纪 80年代末,日本发生了以模糊控制技术为强劲推动力的科技革命,模糊控制的研究成果广泛应用于各个领域。根据日本电气公司 1991 年 9 月统计,松下、三菱、东芝等著名电器公司的空调机、全自动洗衣机、吸尘器等电器产品中普遍应用了模糊控制理论,而到 1994 年普及率高达 50%。在硬件方面,出现了模糊控制器、模糊推理等专用芯片,且在国外有些模糊控制器集成硬件已有出售,如富士电机公司的 FRUITAX;立石电机公司的 FZ-3000,FZ-5000 和英国 ImageAutomation公司的 LINK man。所有这些都极大地加强了模糊控制理论研究和应用的效果。
利用模糊控制语句构成模糊控制器,首次将模糊控制理论应用于蒸汽机及锅炉的控制中,取得了优于常规调节器的控制品质开启了模糊控制在工程上获得成功应用的先河,此后,在日本和西欧等发达国家相继出现了将模糊控制技术应用于温度、热水装置、压力与液面等控制系统中。1979 年英国的I.J.Procyk和E.H.Mandani提出了一种自组织模糊控制器,可以在控制过程中不断修改和调整控制规则,使控制系统不断完善,提高了模糊控制的智能化程度。模糊控制系统的大规模应用发生在日本。上世纪 80年代末,日本发生了以模糊控制技术为强劲推动力的科技革命,模糊控制的研究成果广泛应用于各个领域。根据日本电气公司 1991 年 9 月统计,松下、三菱、东芝等著名电器公司的空调机、全自动洗衣机、吸尘器等电器产品中普遍应用了模糊控制理论,而到 1994 年普及率高达 50%。在硬件方面,出现了模糊控制器、模糊推理等专用芯片,且在国外有些模糊控制器集成硬件已有出售,如富士电机公司的 FRUITAX;立石电机公司的 FZ-3000,FZ-5000 和英国 ImageAutomation公司的 LINK man。所有这些都极大地加强了模糊控制理论研究和应用的效果。
在国内,模糊控制的应用同样取得了显著成果。都志杰等人成功地用单片机研制了工业用模糊控制器。此后又有大量学者将模糊控制方法成功地应用在温度控制、大滞后过程中。随着模糊控制技术的广泛应用,国内外许多学者对模糊控制系统的设计方法及稳定性分析野进行了大量的研究,并得到了丰富的结果。Tanaka 和Sugeno基于Lyapunov直接法对 T-S 模型进行了分析,给出系统的稳定性判定条件,公共Lyapunov函数法,并利用模糊结构图的化简给出闭环系统的设计方法;Wang H O利用并行分布补偿(PDC)的概念提出 T-S 模糊闭环系统的稳定设计方法,Wang 把稳定性分析等价于线性矩阵不等式问题,最终可用凸规划技巧得以有效解决;Cao 等人还提出用一组矩阵构造分段光滑的二次 Lyapunov 函数的方法进行稳定性设计,并给出了模糊控制器全局渐近稳定性条件;Johansson等人利用输入变量隶属度信息,提出利用连续的分段 Lyapunov 去分析系统稳定性;Feng等研究了由一组局部状态空间模型表示的模糊系统,通过设计每一局部状态反馈控制器和补偿器来设计模糊控制器,使整个闭环系统全局渐近稳定;Ren和 Wang等人在公共 Lyapunov 函数的基础上,研究了一类 T-S 模糊系统的稳定性,并提出了采用了分段 Lyapunov 函数法(Piecewise Lyapunov Function)判定系统稳定性的判据;K.Tanaka等人采用模糊Lyapunov 函数法(Fuzzy Lyapunov Function)分析模糊控制系统稳定性。
1.3神经网络的发展与研究现状
1.3.1 神经网络的发展
神经网络起源于20世纪40年代,至今发展已半个多世纪,大致分为三个阶段。
1)20世纪50年代-20世纪60年代:第一次研究高潮
自1943年M-P模型开始,至20世纪60年代为止,这一段时间可以称为神经网络系统理论发展的初期阶段。这个时期的主要特点是多种网络的模型的产生与学习算法的确定。
2)20世纪60年代-20世纪70年代:低潮时期
到了20世纪60年代,人们发现感知器存在一些缺陷,例如,它不能解决异或问题,因而研究工作趋向低潮。不过仍有不少学者继续对神经网络进行研究。
Grossberg 提出了自适应共振理论;Kohenen 提出了自组织映射;Fukushima 提出了神经认知网络理论;Anderson提出了BSB模型;Webos 提出了BP理论等。这些都是在20世纪70年代和20世纪80年代初进行的工作。
3)20世纪80年代-90年代:第二次研究高潮
进入20世纪80年代,神经网络研究进入高潮。这个时期最具有标志性的人物是美国加州工学院的物理学家John Hopfield。他于1982年和1984年在美国科学院院刊上发表了两篇文章,提出了模拟人脑的神经网络模型,即最著名的Hopfield模型。Hopfield网络是一个互连的非线性动力学网络,它解决问题的方法是一种反复运算的动态过程,这是符号逻辑处理方式做不具备的性质。20世纪80年代后期到90年代初,神经网络系统理论形成了发展的热点,多种模型、算法和应用被提出,研究经费重新变得充足,使得研究者们完成了很多有意义的工作。
1.3.2 神经网络的现状
进入20世纪90年代以来,神经网络由于应用面还不够宽,结果不够精确,存在可信度问题,从而进入了认识与应用研究期。
1)开发现有模型的应用,并在应用中根据实际运行情况对模型、算法加以改造,以提高网络的训练速度和运行的准确度。
2)充分发挥两种技术各自的优势是一个有效方法。
3)希望在理论上寻找新的突破,建立新的专用/通用模型和算法。
4)进一步对生物神经系统进行研究,不断地丰富对人脑的认识。