南京理工大学紫金学院
实验报告
实验科目:
班 级:
学 生 姓 名 :
学 号:
实验综合成绩:
实验一 汽车加速性实验
一、实验目的
1.学习汽车加速性能的测试方法。
2.了解试验用仪器的主要结构、工作原理和使用方法。
二、实验内容
在试验道路上,选取合适长度的路段,作为加速性能试验路段,在两端各放置标杆作为记号。
1.汽车原地起步加速试验
①用汽车多功能测试仪记录加速过程的速度、时间、行驶距离;
②汽车停在加速试验路段起点,驾驶员按规定作好准备;
③试验员按“START”键,同时以常用起步挡(轿车为I挡,货车为II挡) 起步;
④驾驶员按最佳换档时刻迅速地换至最高挡,节气门处于最大开度,全力 加速到80%最高车速或自己所需车速时,按“STOP”键停止记录;
⑤试验往返两个方向各进行一次,测量区段应尽量重合;
⑥试验结果取平均值,绘制汽车原地起步加速曲线,即车速-加速时间(ua-t) 曲线和车速-加速距离(ua-s)曲线,根据曲线评定汽车的原地起步加速性能;
⑦说明:可稍提前按“START”键,仪器自动从车速大于0时刻开始记录。
2.汽车直接挡加速试验
① 用汽车多功能测试仪记录加速过程的速度、时间、行驶距离;
② 汽车在直接挡以预定的车速(从稍高于该挡最低稳定车速起,选5的整数倍之速度如20、25、30、35、40km/h)作等速行驶,用汽车多功能测 试仪监测初速度;
③ 当车速稳定后(偏差±1km/h),驶入试验路段,试验员按“START”键, 同时驾驶员迅速将到底以最大的加速加速踏板踩度使车速提高;
④ 当车速达到该挡位最高车速的80%或自己所需车速时,按“STOP”键停止记录;
⑤ 试验往返两个方向各进行一次,测量区段应尽量重合;
⑥ 试验结果取平均值,绘制汽车直接挡加速曲线,即车速-加速时间(ua-t) 曲线和车速-加速距离(ua-s)曲线,根据曲线评定汽车的直接挡加速性能。
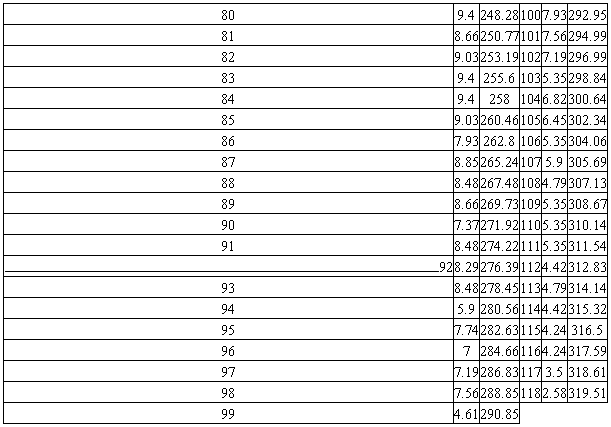
三、实验数据分析
汽车原地起步加速性能试验记录表

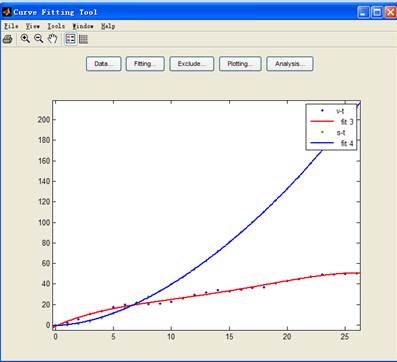
Fit-3
Linear model Poly4:
f(x) = p1*x^4 + p2*x^3 + p3*x^2 + p4*x + p5
Coefficients (with 95% confidence bounds):
p1 = -0.0003905 (-0.0006102, -0.0001709)
p2 = 0.02211 (0.0106, 0.03363)
p3 = -0.4297 (-0.6271, -0.2322)
p4 = 5.088 (3.86, 6.316)
p5 = -1.313 (-3.527, 0.9012)
Goodness of fit:
SSE: 40.92
R-square: 0.9932
Adjusted R-square: 0.9919
RMSE: 1.364
Fit-4
Linear model Poly4:
f(x) = p1*x^4 + p2*x^3 + p3*x^2 + p4*x + p5
Coefficients (with 95% confidence bounds):
p1 = 0.000154 (6.036e-005, 0.0002477)
p2 = -0.009115 (-0.01403, -0.004204)
p3 = 0.4286 (0.3444, 0.5128)
p4 = 0.5327 (0.009126, 1.056)
p5 = -0.7848 (-1.729, 0.1595)
Goodness of fit:
SSE: 7.443
R-square: 0.9999
Adjusted R-square: 0.9999
RMSE: 0.5817
直接档加速试验

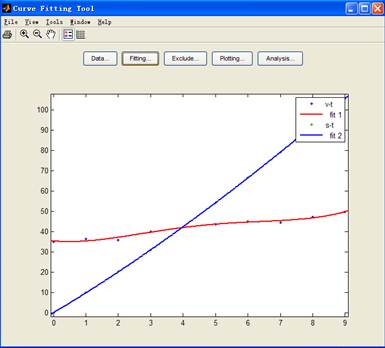
Fit-1
Linear model Poly4:
f(x) = p1*x^4 + p2*x^3 + p3*x^2 + p4*x + p5
Coefficients (with 95% confidence bounds):
p1 = 0.01699 (-0.002003, 0.03599)
p2 = -0.3088 (-0.6535, 0.03596)
p3 = 1.745 (-0.2656, 3.756)
p4 = -1.482 (-5.577, 2.613)
p5 = 35.28 (32.92, 37.64)
Goodness of fit:
SSE: 4.499
R-square: 0.98
Adjusted R-square: 0.9641
RMSE: 0.9485
Fit-2
Linear model Poly4:
f(x) = p1*x^4 + p2*x^3 + p3*x^2 + p4*x + p5
Coefficients (with 95% confidence bounds):
p1 = 0.0002812 (-0.001438, 0.002)
p2 = -0.01004 (-0.04123, 0.02115)
p3 = 0.3216 (0.1397, 0.5036)
p4 = 9.443 (9.073, 9.814)
p5 = 0.0157 (-0.1979, 0.2293)
Goodness of fit:
SSE: 0.03683
R-square: 1
Adjusted R-square: 1
RMSE: 0.08583
实验二 汽车滑行实验
一、实验目的
1.学习测定汽车的滑行距离的方法,检查汽车底盘部分的调整状况。
2.学习测定汽车在某种道路上行驶时的滚动阻力系数f的方法。
3.学习测定汽车的空气阻力系数的方法。
二、实验方法
①在长约1000m的试验路段两端立上标杆作为滑行区段;
② 选择“动力性试验”项中的“滑行”试验项,并按“MENU”键,进入试验界面;
③ 汽车驶入滑行区段前,车速应稍大于50km/h,在即将驶入滑行区段前, 变速器置入空档,并松开离合器踏板,作滑行行驶;
④ 在进入滑行区段后,当车速为50km/h时试验员按下“START”键开始测量;
⑤ 滑行过程中,应保持直线行驶,不得转动转向盘,不允许使用制动器, 直到停车为止;
⑥ 仪器自动记录从车速50km/h开始,到汽车停止的整个滑行过程的滑行 距离和滑行时间;
⑦ 试验至少往返各滑行一次,往返试验的路段应重合。
三、实验数据分析


Fit-1
Linear model Poly1:
f(x) = p1*x + p2
Coefficients (with 95% confidence bounds):
p1 = -0.09881 (-0.1082, -0.08945)
p2 = 15.74 (15.1, 16.38)
Goodness of fit:
SSE: 367
R-square: 0.7888
Adjusted R-square: 0.787
RMSE: 1.771
Fit-2
Linear model Poly2:
f(x) = p1*x^2 + p2*x + p3
Coefficients (with 95% confidence bounds):
p1 = -0.01042 (-0.01113, -0.009701)
p2 = 3.828 (3.74, 3.915)
p3 = 12.5 (10.27, 14.72)
Goodness of fit:
SSE: 2002
R-square: 0.9979
Adjusted R-square: 0.9979
RMSE: 4.154
计算:
由上图的拟合曲线可知

由此可见路面状况良好
实验三?汽车制动性实验
一、实验目的
了解汽车制动性能的试验方法。
二、实验内容
①开动汽车多功能测试仪,选择“动力性试验”中“制动”试验项,进入 试验数据显示状态;
②试验时,汽车初速为30km/h左右,汽车以预定的初速稳定行驶;
③汽车行至试验区段时,按口令以最大减速度制动至停车。制动时,离合器分离或变速器置于空挡;
④当踩下踏板开关时,仪器自动记录直至速度为零这段时间的初速度、制动距离和时间;
⑤试验往返进行各一次;
⑥试验中,必须注意扶紧车厢板,以免碰伤人或碰坏仪器;
⑦制动初速度在规定的>土10%的距离按范围里,制动距离按下式校正。
三、实验数据分析


Linear model Poly5:
f(x) = p1*x^5 + p2*x^4 + p3*x^3 + p4*x^2 + p5*x + p6
Coefficients (with 95% confidence bounds):
p1 = -0.0006467 (-0.0006999, -0.0005935)
p2 = 0.0242 (0.02199, 0.02641)
p3 = -0.3229 (-0.3562, -0.2896)
p4 = 1.671 (1.454, 1.889)
p5 = -2.948 (-3.529, -2.368)
p6 = 31.78 (31.31, 32.25)
Goodness of fit:
SSE: 797
R-square: 0.9935
Adjusted R-square: 0.9935
RMSE: 0.9426
对拟合的曲线进行求导画出图像


最大制动减速
实验四 汽车平顺性实验
一、实验目的
根据汽车平顺性随机输入行驶试验方法,测定车厢内某处加速度,以加权加 速度的均方根值对平顺性进行评价。
二、实验内容
①安装好传感器;(x、y、z三个方向的传感器分别接在平顺性试验的三个通道。注:z安装在1通道。)
②将座垫加速度计安放在所测座椅位置处,一乘员坐在传感器上,后背不能与座椅相靠;
③汽车以30km/h的车速在实验路段匀速行驶,待车速稳定后试验员按 “START”键,仪器开始采集数据;
④在合适的时候,试验员按“STOP”键停止数据采集;样本长度为3min;
⑤通过数据处理可得到各通道原始曲线、功率谱以及试验结果。
三、实验数据分析



计算总加权加速度均方值 :
:


又加权振级 ,其中
,其中 ,
,
则
查表得,人的主观感觉是相当不舒服。
第二篇:汽车理论实验报告1

汽
车
理
论
实
验
报学院: 机械学院
专业:车辆工程09-02班
姓名: 张鹏起
学号: 310904020228
一 汽车操纵稳定性实验
1.实验目的:
了解和掌握汽车操纵稳定性实验的实验方法和基本原理,学会使用simulink仿真软件进行仿真分析。
2.实验内容:
建立汽车二自由度的simulink仿真模型,并在转向盘角阶跃输入和正弦输入两种特殊工况下模拟质心侧偏角 和横摆角速度
和横摆角速度 的变化曲线。
的变化曲线。
汽车二自由度的运动微分方程式为:
 2-1
2-1
3.实验方法:
根据2-1式在simulink仿真软件中建立汽车二自由度仿真模型,如下图所示
4.实验结果:
1.1质心侧偏角

1.2横摆角速度

汽
车
理
论
实
验
报
学院: 机械学院
专业:车辆工程09-02班
姓名: 张鹏起
学号: 310904020228
二汽车平顺性实验
1.实验目的:
解和掌握汽车平顺性实验的实验方法和基本原理,学会使用simulink仿真软件进行仿真分析。
2.实验内容:
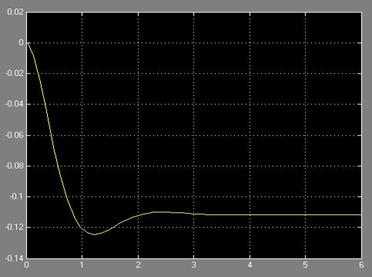
建立汽车车身与车轮双质量系统的simulink仿真模型,并在路面白噪声激励输入工况下模拟汽车车身加速度和悬架动挠度的变化曲线。
汽车车身与车轮双质量运动方程:
 2-1
2-1
 2-2
2-2
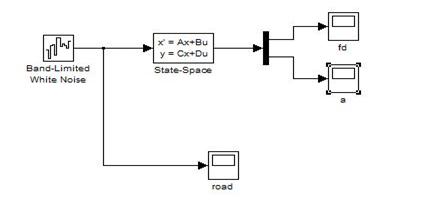
3.实验方法:
根据2-1和2-2式在simulink仿真软件中建立汽车车身与车轮双质量系统仿真模型,如下图所示
4.实验结果: