一、简答题
1.PLC定义:
1)可编程序控制器是一种数字运算的电子系统,专为在工业环境条件下应用而设计。它采用可编程序的存储器,用来在内部存储执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字式、模拟式的输入输出,控制各种类型的机械或生产过程。可编程序控制器及其有关设备都应按易于使工业控制系统形成一个整体、易于扩充其功能的原则设计
2)它是一种带有指令存储器、数字或模拟I/O接口,以位运算为主,能完成逻辑、顺序、定时、计数和算术运算功能,用于控制机器或生产过程的自动控制装置。
 2.PLC
的功能
2.PLC
的功能
1.开关逻辑和顺序控制
2.模拟控制(A/D和D/A控制)
3.定时/计数控制
 3.PLC
的特点
3.PLC
的特点
编程方法简单易学。(有规律性)
功能强,性能价格比高。(性价比高)
通用性强,控制程序可变。(通用性)
硬件配套齐全,用户使用方便。(适应性强)
可靠性高。(抗干扰能力强:硬件、软件)
4.PLC的分类
按I/O点数分
² 小型PLC I/O点数为256点以下的为小型PLC
² 中型PLC I/O点数为256点以上、2048点以下的为中型PLC
² 大型PLC I/O点数为2048以上的为大型PLC
按结构形式分
² 整体式PLC 将电源、CPU、I/O接口等部件都集中装在一个机箱内,具有结构紧凑、体积小、价格低等特点。
² 模块式PLC 将PLC各组成部分分别作成若干个单独的模块,如CPU模块、I/O模块、电源模块(有的含在CPU模块中)以及各种功能模块。
² 紧凑式PLC 还有一些PLC将整体式和模块式的特点结合起来。
按功能分
² 低档PLC 具有逻辑运算、定时、计数、移位以及自诊断、监控等基本功能,还可有少量模拟量输入/输出、算术运算、数据传送和比较、通信等功能。
² 中档PLC 具有低档PLC功能外,增加模拟量输入/输出、算术运算、数据传送和比较、数制转换、远程I/O、子程序、通信联网等功能。有些还增设中断、PID控制等功能。
² 高档PLC 具有中档机功能外,增加带符号算术运算、矩阵运算、位逻辑运算、平方根运算及其它特殊功能函数运算、制表及表格传送等。高档PLC机具有更强的通信联网功能。
5.PLC硬件结构和各自的功能
 1)微处理器(CPU)
1)微处理器(CPU)
v 接收并存储用户程序和数据;
v 诊断电源、PLC工作状态及编程的语法错误;
v 接收输入信号,送入数据寄存器并保存;
 2
)存储器
2
)存储器
系统存储器——系统程序存储器+系统数据存储器
v 存放系统工作程序(监控程序);
v 存放模块化应用功能子程序;
v 存放命令解释程序;
v 存放功能子程序的调用管理程序;
v 存放存储系统参数。
用户存储器——RAM/EPROM/E2PROM
v 存放用户工作程序;
v 存放工作数据。
4)编程器
v 编程器是PLC的重要外围设备。利用编程器将用户程序送入PLC的存储器,还可以用编程器检查程序,修改程序,监视PLC的工作状态。
v 常见的给PLC编程的装置有手持式编程器和计算机编程方式。
5)电源
电源单元——是PLC内部的一个专用开关式稳压电源,把220V交流电源转换成内部工作电压。(如5伏、±12伏、24伏直流电压),并为外部输入元件(如接近开关)提供24V直流电源(仅供输入端点使用),而驱动PLC负载的电源由用户提供。
6.编程软件的使用
1) 软件的安装
v 软件来源:STEP 7-Micro/WIN32——西门子网站下载或光盘。
v 安装:双击STEP 7-Micro/WIN32的安装程序setup.exe,根据在线提示,完成安装。
v 编程语言:选择英语。
v 界面汉化:安装完后可用STEP 7-Micro/WIN 32中文汉化软件将编程界面和帮助文件汉化,使编程环境为中文状态。
2) 软件的基本功能
v 创建用户程序、修改和编辑原有的用户程序。
v 设置PLC的工作方式和参数,上装和下装用户程序,进行程序的运行监控。
v 具有简单语法的检查、对用户程序的文档管理和加密等功能,并提供在线帮助。
3) 编程、调试、运行监控方法
程序的编辑
v 1、程序的输入、编辑
v 通常利用LAD(梯形图)进行程序的输入,程序的编辑包括程序的剪切、拷贝、粘贴、插入和删除,字符串替换、查找等。 还可以利用符号表对POU(程序组织单元 )中的符号赋值。
v 2、程序的编译及上、下载
v (1)编译:程序的编译,能明确指出错误的网络段,编程者可以根据错误提示对程序进行修改,然后再次编译,直至编译无误。
v (2)下载:用户程序编译成功后,将下载块中选中下载内容下载到PLC的存储器中。
v (3)载入(上载):载入可以将PLC中未加密的程序或数据向上送入编程器(PC机)。
程序的编译
v 程序编辑完成,可用菜单“PLC”中的“编译”项进行离线编译。
v 编译结束后在输出窗口显示程序中的语法错误的数量、各条错误的原因和错误在程序中的位置。
v 双击输出窗口中的某一条错误,程序编辑器中的矩形光标将会移到程序中该错误所在的位置。
v 必须改正程序中的所有错误,编译成功后才能下载程序。
程序的监视、运行、调试*
v 1. 程序运行方式的设置
v 将CPU的工作方式开关置在RUN位置。或将开关置在TERM(暂态)位置时,操作STEP7-Micro/WIN32菜单命令或快捷按钮对CPU工作方式进行软件设置。
v 2. 程序运行状态的监视
v 运用监视功能,在程序状态打开下,观察PLC运行时,程序执行的过程中各元件的工作状态及运行参数的变化。
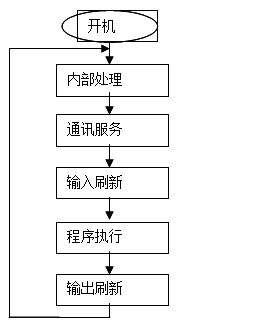
7.
 PLC
工作过程
PLC
工作过程
8.功能指令
1) PID
PLC的PID算法的特点:
u 系统设置简单,针对不同的控制系统的特点,使用比例项,或使用比例项+积分项,或使用比例项+积分项+微分项,具有较强的适应性和灵活性。
u 参数调整相对简单,易于达到控制要求。
u 程序设计简单,直接套用即可,没有繁琐的逻辑及算术运算,实际工程中容易实现。
PLC实现PID算法的过程
以连续的PID控制算法规律为基础,然后将其规律数字化,总结出离散性的控制算法,最后按照离散性控制算法进行程序设计
2) 高速指令
高速计数器的指令包括:定义高速计数器指令HDEF 和执行高速计数指令HSC,
3) 中断、子程序
子程序调用指令:
1.建立子程序
(1)从“编辑”菜单,选择插入→子程序;
(2)从“指令树”,用鼠标右键单击“程序块”图标,并从弹出菜单选择插入→子程序;
(3)从“程序编辑器”窗口,用鼠标右键单击,并从弹出菜单选择插入→ 子程序。
2. 子程序调用
v 子程序调用和返回指令
v 子程序调用 SBR 子程序条件返回 CRET
3. 带参数的子程序调用
(1)子程序参数 ;(2)局部变量的类型 ;(3)数据类型 ;(4)建立带参数子程序的局部变量表;(5)带参数子程序调用指令
中断
1.中断源
(1)通信中断:PLC的自由通信模式下,通信口的状态可由程序来控制
I/O中断:I/O中断包括外部输入中断、高速计数器中断和脉冲 串输出中断。
时间中断:时间中断包括定时中断和定时器中断。
2.中断优先级
中断优先级由高到低依次是:通信中断、输入输出中断、时基中断。
3.CPU响应中断的顺序
PLC中CPU响应中断的顺序可以分以下三种情况:
当不同的优先级的中断源同时申请中断,CPU响应中断请求的顺序为从优先级高的中断源到优先级低的中断源。
当相同优先级的中断源申请中断时,CPU按先来先服务的原则响应中断请求。
当CPU正在处理某中断,又有中断源提出中断请求时,新出现的中断请求按优先级排队等候处理,当前中断服务程序不会被其他甚至更优先级的中断程序打断。任何时刻CPU只执行一个中断程序。
4.中断控制
经过中断判优后,将优先级最高的中断请求送给CPU,CPU响应中断后自动保存逻辑堆栈、累加器和某些特殊标志寄存器位,即保护现场。中断处理完成后,又自动恢复这些单元保存起来的数据,即恢复现场。
4) 通信指令
PLC通信类型:
①PPI通信
v PPI通信是PLC的CPU默认的通信方式,PPI是一种主/从协议通信,PPI网络只在主站侧编写程序即可,从站的读写网络指令没有意义
v NETR 网络读取指令,是启动一项PPI通信的操作,通过指定的端口(PORT)从远程设备读取数据到本地表格(TBL)
v NETW 网络写入指令,是启动一项PPI通信操作,通过指定的端口(PORT)根据表格(TBL)定义把表格(TBL)的数据写入远程设备
v PPI(Point-to-point-Interface)协议,即点对点接口,是一个主/从协议。协议规定主站向从站发出申请,从站进行响应。从站不能初始化信息。但当主站发出申请或查询时,从站才对其响应。
②自由口通信
自由口模式通信是指用户程序在自定义的协议下,通过端口0控制PLC主机与其他的带编程口的智能设备(如打印机、条形码阅读器、显示器等)进行通信。
在自由口模式下,主机只有在RUN方式时,用户才可以用相关的通信指令编写用户控制通信口的程序。当主机处于STOP方式时,自由口通信被禁止,通信口自动切换到正常的PPI协议操作。
用户程序通过特殊存储器SMB30(对端口0)、SMB130(对端口1)控制通信口的工作模式
③以太网通信
CP243——1以太网模块是S7-200系列的以太网通信专用的处理器,PLC使用CP243——1以太网模块与工业以太网连接
ETHx_CTRL子程序是初始化以太网模块和执行以太网模块错误检查
ETHx_XFR子程序通过指定客户机连接和信息号码,命令本地S7-200和远程站之间进行数据传送
ETHx_CFG子程序是命令以太网模块从V内存中的数据块重设和读取配置块
二、编程题
1.逻辑指令
①逻辑与指令
Ø WAND_B 逻辑字节与指令(8位)
Ø WAND_W 逻辑字与指令(16位)
Ø WAND_DW 逻辑双字与指令(32位)
Ø 与逻辑可以把指定的位屏蔽为“0”
②逻辑或指令
Ø WOR_B 逻辑字节或指令(8位)
Ø WOR_W 逻辑字节或指令(16位)
Ø WOR_DW 逻辑字节或指令(32位)
Ø 或逻辑可以把指定的位钳位位“1”
③逻辑异或指令
WXOR_B 逻辑字节异或指令(8位)
WXOR_W 逻辑字异或指令(16位)
WXOR_DW 逻辑双字异或指令(32位)
2.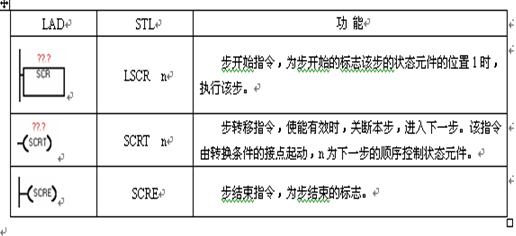 顺序指令(与实验相关)
顺序指令(与实验相关)
(1)顺序步开始指令 (LSCR)
(2)顺序步结束指令 (SCRE)
(3)顺序步转移指令 (SCRT)
使用顺序控制结构,编写出实现红、绿灯循环显示的程序(要求循环间隔时间为1s)。

分析:当I0.0输入有效时,起动S0.0,执行程序的第一步,输出Q0.0置1(点亮红灯),Q0.1置0(熄灭绿灯),同时起动定时器T37,经过1s,步进转移指令使得S0.1置1,S0.0置0,程序进入第二步,输出点Q0.1置1(点亮绿灯),输出点Q0.0置0(熄灭红灯),同时起动定时器T38,经过1s,步进转移指令使得S0.0置1,S0.1置0,程序进入第一步执行。如此周而复始,循环工作。
3.功能指令
①跳转、循环、移位
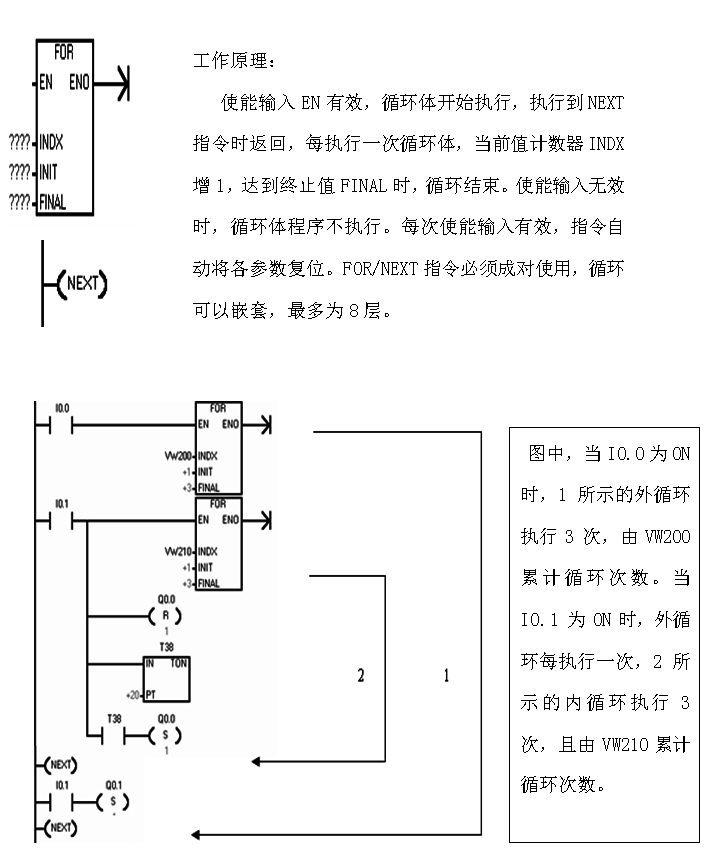
(一)循环指令
由 FOR和NEXT指令构成程序的循环体。FOR指令标记循环的开始,NEXT指令为循环体的结束指令。
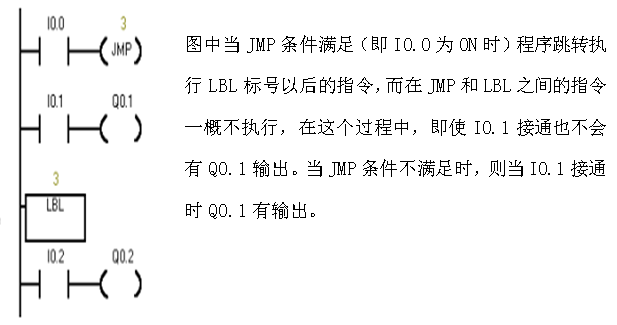
(二)跳转指令
(1)跳转指令
JMP,跳转指令。使能输入有效时,使程序流程跳到同一程序中的指定标号n处执行。
(2)标号指令
LBL,标号指令。标记程序段,作为跳转指令执行时跳转到的目的位置。操作数n为0~255的字型数据。
 跳转指令示例
跳转指令示例

分析:
MP、LBL指令在工业现场控制中,常用于工作方式的选择。如有3台电动机M1~M3,具有两种起停工作方式:
1)手动操作方式:分别用每个电动机各自的起停按钮控制M1~M3的起停状态。
2)自动操作方式:按下起动按钮,M1~M3每隔5s依次起动;按下停止按钮,M1~M3同时停止。
PLC控制的外部接线图,程序结构图,梯形图分别如图6-53a、b、c所示。
从控制要求中,可以看出,需要在程序中体现两种可以任意选择的控制方式。所以运用跳转指令的程序结构可以满足控制要求。如图6-53b所示,当操作方式选择开关闭合时,I0.0的常开触点闭合,跳过手动程序段不执行;I0.0常闭触点断开,选择自动方式的程序段执行。而操作方式选择开关断开时的情况与此相反,跳过自动方式程序段不执行,选择手动方式程序段执行。
(三)
 循环移位
循环移位
ROL_B 字节循环左移
ROL_W 字循环左移
ROL_DW 双字循环左移
ROR_B 字节循环右移
ROR_W 字循环右移
ROW_DW 双字循环右移
循环移动的最后一位数值被复制至溢出标志位(SM1.1)
SHRB 位移位寄存器指令
SHRB 位移位寄存器指令将DATA数值移入移位寄存器
S_BIT 指定移位寄存器的最低位
N指向移位寄存器的长度和移位方向(N=正数 左移位 ,N=负数 右移位)
SHRB 指令移出的每个位被传送在溢出标志位(SM1.1)中
②比较指令
比较指令是将两个操作数按指定的条件比较,操作数可以是整数,也可以是实数,在梯形图中用带参数和运算符的触点表示比较指令,比较条件成立时,触点就闭合,否则断开。比较触点可以装入,也可以串、并联。比较指令为上、下限控制提供了极大的方便。
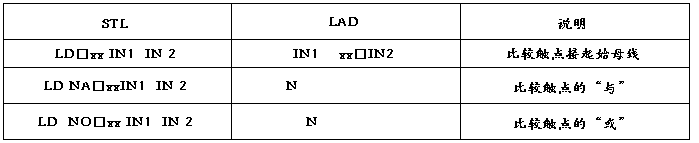
“xx”表示比较运算符:== 等于、〈小于、〉大于、〈= 小于等于、〉= 大于等于、〈〉不等于。
“□”表示操作数N1,N2的数据类型及范围:
B(Byte):字节比较(无符号整数),如:LDB==IB2 MB2
I(INT)/ W(Word):整数比较,(有符号整数),如:AW〉= MW2 VW12
注意:LAD中用“I”,STL中用“W”。
DW(Double Word):双字的比较(有符号整数), 如:OD= VD24 MD1
R(Real):实数的比较(有符号的双字浮点数,仅限于CPU214以上)
N1,N2操作数的类型包括:I,Q,M,SM,V,S,L,AC,VD,LD,常数。
4.逻辑运算
5.算术运算
6.传送及转换
(一)
 传送类指令
传送类指令
MOV_B 字节传送指令
MOV_W 字传送指令
MOV_DW 双字传送指令
MOV_R 小数传送指令
BLKMOV_B 字节成批传送指令
BLKMOV_W 字成批传送指令
(二)转换
注意:程序需加注释、加梯级
逻辑控制、顺序控制、无地址分配表不给分