计算机控制原理
实验报告
姓 名:
学 号:
班 级:
指导教师:
完成时间:
实验一 二阶系统闭环参数 和
和 对时域响应的影响
对时域响应的影响
一、实验目的
1.研究二阶系统闭环参数和对时域响应的影响
2.研究二阶系统不同阻尼比下的响应曲线及系统的稳定性。
二、实验要求
1. 从help菜单或其它方式,理解程序的每个语句和函数的含义;
2.分析对时域响应的影响,观察典型二阶系统阻尼系数在一般工程系统中的选择范围;
三、实验内容
1、如图1所示的典型二阶系统,其开环传递函数为 ,其中,无阻尼自然震荡角频率=1,为阻尼比,试绘制分别为0, 0.2, 0.4, 0.6, 0.9, 1.2, 1.5时,其单位负反馈系统的单位阶跃响应曲线(绘制在同一张图上)。
,其中,无阻尼自然震荡角频率=1,为阻尼比,试绘制分别为0, 0.2, 0.4, 0.6, 0.9, 1.2, 1.5时,其单位负反馈系统的单位阶跃响应曲线(绘制在同一张图上)。
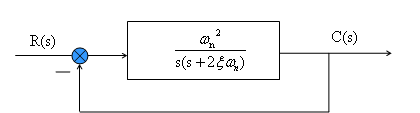
图1 典型二阶系统方框图
2、程序代码
wn=1;
sigma=[0,0.2,0.4,0.6,0.9,1.2,1.5];(1)
num=wn*wn;
t=linspace(0,20,200)';(2)
for j=1:7(3)
den=conv([1,0],[1,2*wn*sigma(j)]);(4)
s1=tf(num,den);(5)
sys=feedback(s1,1)(6);
y(:,j)=step(sys,t);(7)
end
plot(t,y(:,1:7));(8)
grid;(9)
gtext('sigma=0');(10)
gtext('sigma=0.2');
gtext('sigma=0.4');
gtext('sigma=0.6');
gtext('sigma=0.9');
gtext('sigma=1.2');
gtext('sigma=1.5');
3、代码函数理解分析
(1)给赋值。
(2)用于创建向量。linspace是Matlab中的一个指令,用于产生x1,x2之间的N点行矢量。其中x1、x2、N分别为起始值、终止值、元素个数。若缺省N,默认点数为100。
(3)给j赋值1至7。
(4)做多项式的乘积(卷积),用来表示s(s+2),并赋值给den。
(5)定义开环传递函数,num做分子,den做分母。
(6)ys=feedback(sys1,sys2),其中sys1是对象,sys2代表负反馈线路中的传递函数,也就是后所sys = feedback(sys1,2)意思是指对sys1系统进行负反馈,负反馈增益为2,sys = feedback(sys1,1)意思是对sys1进行单位负反馈。
(7)求系统在时间t内的单位阶跃响应。
(8)作图,以t为横坐标,y为纵坐标做7条曲线。
(9)网格显示。
(10)点击显示sigma的值。
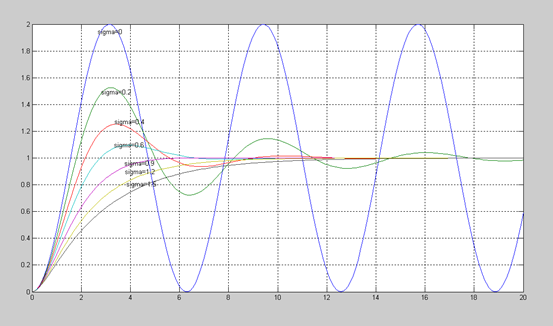
4、曲线图
四、实验结论
从二阶系统的脉冲响应曲线可以看出:
无阻尼响应(sigma=0)为等幅震荡,没有调节作用;
过阻尼和临界阻尼(sigma>=1)是单调衰减的,不存在超调的现象;
欠阻尼(0<sigma<1)是有超调衰减的过程,随着阻尼比的减小单位阶跃响应的震荡特性加强。在欠阻尼响应中,sigma=0.4到0.8的响应过程不仅具有较sigma=1时的更短的调整时间,而且震荡特性也不严重。因此,一般希望二阶系统工作在
sigma=0.4到0.8的欠阻尼状态因为在这种状态下将获得一个震荡适度,调整时间较短的响应过程。
实验二 开环参数K和T对系统动态性能及稳定性的影响
一、实验目的
研究开环参数K和T对系统动态性能及稳定性的影响。
二、实验要求
1. 推导单位负反馈系统的闭环传递函数;
2. 对比二阶系统的典型传递函数,找出K、T与、的关系式;
3. 从2中的关系式中分析K、T与、的关系;
4. 实验参数设定T=1,试绘制K分别为0.1, 0.2, 0.5, 0.8, 1.0, 2.4时,其单位负反馈系统的单位阶跃曲线(绘制在同一张图上);
5. 从help菜单或其它方式,制作PPT讲解程序的每个语句和函数的含义;
三、实验内容
1、对一般的二阶系统而言,其开环传递函数为 ,其中,K为回路增益,通常是可调节的,T为时间常数,通常由被控对象的特性决定,一般是不可以改变的。
,其中,K为回路增益,通常是可调节的,T为时间常数,通常由被控对象的特性决定,一般是不可以改变的。
2、由已知条件可以求得随动系统的闭环传递函数为
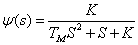
其中TM为机电时间常数,K为开环增益。
二阶系统的单位阶跃响应的标准形式为:
两个表达式对比可以得出:

3、程序代码
T=1;
K=[0.1,0.2,0.5,0.8,1.0,2.4];(1)
t=linspace(0,20,200)(2)
num=1;
den=conv([1,0],[T,1]);(3)
for j=1:6(4)
s1=tf(num*K(j),den);(5)
sys=feedback(s1,1);(6)
y(:,j)=step(sys,t);(7)
end
plot(t,y(:,1:6));(8)
grid;(9)
gtext('K=0.1');(10)
gtext('K=0.2');
gtext('K=0.5');
gtext('K=0.8');
gtext('K=1.0');
gtext('K=2.4');
4、代码函数理解分析
(1)K取值分别为0.1,0.2,0.5,0.8,1.0,2.4;
(2)用于创建向量。linspace是Matlab中的一个指令,用于产生x1,x2之间的N点行矢量。其中x1、x2、N分别为起始值、终止值、元素个数。若缺省N,默认点数为100。
(3)卷积,用于表示S(TS+1)。
(4)给j赋值1至6。
(5)表示开环传递函数,tf(分子,分母),赋值给S1。
(6)单位负反馈。
(7)求系统在时间t内的单位阶跃响应。
(8)作图,以t为横坐标,y为纵坐标做6条曲线。
(9)网格做图。
(10)点击获取K的值。
5、曲线图

四、实验结论
1、在T 一定时,K值增大,响应速度提高,调整时间增大,超调量减小;
K>=1时,系统响应是单调衰减的,K<1时,系统响应是超调衰减的。
2、K和T一起决定和的大小。提高可以提高系统的响应速度,增大提高系统的阻尼程度,从而缩短调整时间。一般情况下,提高是通过增大K来实现的,而的往往是通过减小K完成的,其中机电时间常数T在电动机选定后是一个不可调的确定参数。因此,系统的响应速度和阻尼程度之间存在一定的矛盾。
实验三 理解PID控制器对系统性能的影响,进行PID控制器的设计
对于如图2所示的负反馈控制系统,被控对象和反馈环节的传递函数如下:
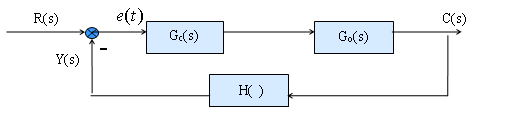
图2 典型的负反馈控制系统方框图
其中,

(一) 比例控制P

一、实验要求
1、对于比例系数为0.1, 2.0,2.4, 3.0, 3.5, 绘制系统的单位阶跃响应;
2、分析比例系数对系统性能的影响;
3、理解程序代码及函数的含义。
二、实验内容
1、程序代码
G=tf(1,conv(conv([1,1],[2,1]),[5,1]))(1)
kp=[0.1,2.0,2.4,3.0,3.5];(2)
for i=1:5(3)
G=feedback(kp(i)*G,1);(4)
step(G);(5)
hold on;(6)
end
gtext('kp=0.1');(7)
gtext('kp=2.0');
gtext('kp=2.4');
gtext('kp=3.0');
gtext('kp=3.5')
2、代码解释分析
(1)表示系统的开环传递函数tf(分子,分母),conv函数是卷积函数,计算多项式的乘法。
(2)分别给kp赋值。
(3)I从1到5,表示循环。
(4)单位反馈函数。
(5)求出系统的单位阶跃响应。
(6)使当前轴及图形保持而不被刷新,准备接受此后将绘制的图形,多图共存。
(7)点击依次获取kp的值。
3、曲线图

三、实验结论
(1)对系统的动态性能影响:Kp加大,将使系统响应速度加快,Kp偏大时,系统振荡次数增多,调节时间加长;;Kp太小又会使系统的响应速度缓慢。Kp的选择以输出响应产生4:1衰减过程为宜。
(2)对系统的稳态性能影响:在系统稳定的前提下,加大Kp可以减少稳态误差,但不能消除稳态误差。因此Kp的整定主要依据系统的动态性能。
(二) 比例微分控制PD
一、实验要求
1、设置 =2,微分时间常数
=2,微分时间常数 =0, 0.3, 0.7, 1.5, 3,试在各个比例微分系数下,绘制系统的单位阶跃响应曲线;
=0, 0.3, 0.7, 1.5, 3,试在各个比例微分系数下,绘制系统的单位阶跃响应曲线;
2、分析微分控制对系统性能的影响;
3、解释和说明程序代码。
二、实验内容
1、程序代码
G=tf(1,conv(conv([1,1],[2,1]),[5,1]));(1)
kp=2;
tou=[0,0.3,0.7,1.5,3];(2)
for i=1:5(3)
G1=tf([kp*tou(i),kp],1);(4)
sys=feedback(G1*G,1);(5)
step(sys);(6)
hold on;(7)
end
gtext('tou=0');(8)
gtext('tou=0.3');
gtext('tou=0.7');
gtext('tou=1.5');
gtext('tou=3');
2、代码解释分析
(1)表示系统的开环传递函数tf(分子,分母),conv函数是卷积函数,计算多项式的乘法。
(2)分别给tou赋值。
(3)I从1到5,表示循环。
(4)比例微分传递函数
(5)单位负反馈函数。
(6)求出系统的单位阶跃响应。
(7)使当前轴及图形保持而不被刷新,准备接受此后将绘制的图形,多图共存。
(8)点击依次获取tou的值。
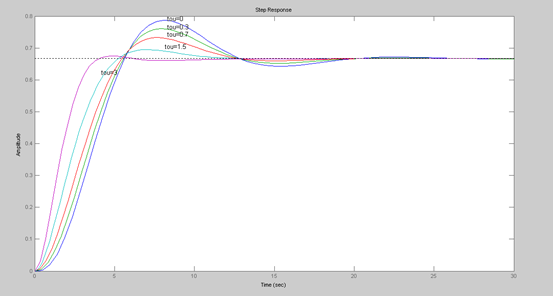
3、曲线图
三、实验结论
(1)积分控制通常和比例控制或比例积分控制联合作用,构成PD控制或PID控制。
(2)对系统的动态性能影响:微分时间的增加即微分作用的增加可以改善系统的动态特性,如减少超调量,缩短调节时间等。适当加大比例控制,可以减少稳态误差,提高控制精度。但值偏大或偏小都会适得其反。另外微分作用有可能放大系统的噪声,降低系统的抗干扰能力。
(3)对系统的稳态性能影响:微分环节的加入,可以在误差出现或变化瞬间,按偏差变化的趋向进行控制。它引进一个早期的修正作用,有助于增加系统的稳定性。
(4) PID控制器的参数必须根据工程问题的具体要求来考虑。在工业过程控制中,通常要保证闭环系统稳定,对给定量的变化能迅速跟踪,超调量小。在不同干扰下输出应能保持在给定值附近,控制量尽可能地小,在系统和环境参数发生变化时控制应保持稳定。一般来说,要同时满足这些要求是很难做到的,必须根据系统的具体情况,满足主要的性能指标,同时兼顾其它方面的要求。 在选择采样周期T时,通常都选择远远小于系统的时间常数。
(三) 比例积分控制PI
 , 其中,是比例系数,是积分时间常数,二者可调节。
, 其中,是比例系数,是积分时间常数,二者可调节。
一、实验要求
1、设置比例=2,积分时间常数=3, 6, 14, 21, 28,试在各个比例积分系数下,绘制系统的单位阶跃响应曲线;
2、分析积分控制对系统性能的影响;
3、解释和说明程序代码。
二、实验内容
1、程序代码
G=tf(1,conv(conv([1,1],[2,1]),[5,1]));(1)
kp=2;
ti=[3,6,14,21,28];(2)
for i=1:5(3)
G1=tf([kp,kp/ti(i)],[1,0]);(4)
sys=feedback(G1*G,1);(5)
step(sys);(6)
hold on;(7)
end
gtext('ti=3');(8)
gtext('ti=6');
gtext('ti=14');
gtext('ti=21');
gtext('ti=28');
2、代码解释分析
(1)表示系统的开环传递函数tf(分子,分母),conv函数是卷积函数,计算多项式的乘法。
(2)分别给ti赋值。
(3)I从1到5,表示循环。
(4)比例积分传递函数
(5)单位负反馈函数。
(6)求出系统的单位阶跃响应。
(7)使当前轴及图形保持而不被刷新,准备接受此后将绘制的图形,多图共存。
(8)点击依次获取ti的值。
3、曲线图
三、实验结论
(1)积分控制通常和比例控制或比例微分控制联合作用,构成PI控制或PID控制。
(2)对系统的动态性能影响:积分控制通常影响系统的稳定性。TI太小,系统可能不稳定,且振荡次数较多;TI太大,对系统的影响将削弱;当TI较适合时,系统的过渡过程特性比较理想。
(3)对系统的稳态性能影响:积分控制有助于消除系统稳态误差,提高系统的控制精度,但若TI太大,积分作用太弱,则不能减少余差。
实验四 确定使计算机控制系统稳定的开环增益范围
如图3所示的离散线性系统,采样周期Ts=1s,其中,对象模型 ,零阶保持器
,零阶保持器 。
。



图3 离散线性系统方框图
一、实验目的
确定使计算机控制系统稳定的开环增益范围。
二、实验要求
1、写出开环系统的传递函数;
2、对开环传递函数进行Z变换,并代入Ts=1s;
3、写出闭环Z传递函数;
4、写出系统的特征方程;
5、绘制根轨迹,并分析根轨迹;
6、用鼠标单击根轨迹与单位圆的交点,发现…;
7、分析系统稳定性随K值变化的规律;
8、近似得出系统稳定的K值范围;
三、实验内容
1、程序代码
num=[0.3678,0.2644];
den=[1,-1.3678,0.3678];
sys=tf(num,den,-1);
rlocus(sys)
rlocfind(sys)
2、代码解释分析
rlocus:求系统根轨迹。
rlocfind:计算给定一组根的根轨迹增益。
3、开环系统的传递函数

4、开环传递函数的Z变换,T0=1s

查表可得
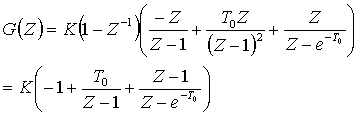
T0=1时

5、闭环Z传递函数

6、系统的特征方程

Z2+(0.368K-1.368)Z+(0.264K+0.368)=0 经过变换,
求得复变量表示的特征方程
0.632K2+(1.264-0.528K) +(2.736-0.104K)=0
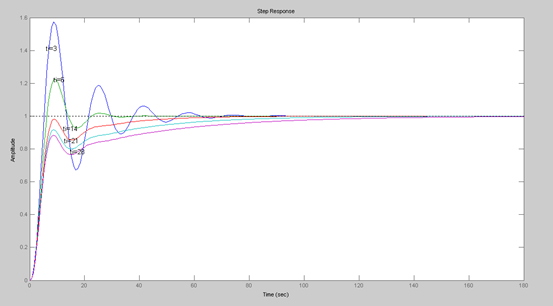
7、系统根轨迹图
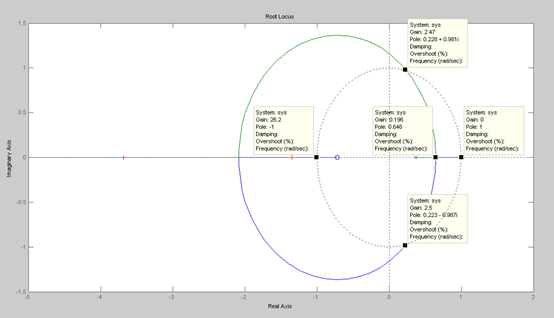
在离散系统根轨迹图上,虚线表示的是单位元,由理论分析可知,系统闭环传递函数的所有极点位于z平面的单位圆内时,该离散系统是稳定的。
8、用鼠标点击曲线将弹出一个提示框,其中各参数含义如下:
Gain:根轨迹增益的值
Pole:当前点的坐标值
Damping:阻尼系数
Overshoot:超调量
Frequency:该条根轨迹分支当前点对应的频率值
四、实验结论
由图可见,一个极点位于单位圆上,一个位于单位圆中,因此,系统在K=0时是稳定的;随着K值得增大,两条根轨迹离开单位圆,系统变得不稳定;随着K值继续增大,虽然有一个极点落在单位圆内,但是另一个极趋向实轴的无穷远处,系统是不稳定的。所以K值得稳定范围是从0开始的一段区间。
根据的特征方程写出Routh计算表,
2 0.632K 2.736-0.104K
1 1.264-0.528K 0
0 2.736-0.104K
根据Routh计算表第一列,由不等式:
K>0 1.264-0.528K>0 2.376-0.104K>0
求得满足二阶线性数字控制系统稳定要求的开环增益K的取值范围为:
0<K<2.39