江苏大学无锡机电学院
课程设计计算说明书
题 目 _牛头刨床机构的运动力学分析_
题 号___________5_______________
姓 名__________张淼________________
班 级__________机制11242________________
学 号__________1010124225________________
指导教师__ 金旭星 吕伟文 _______
完成时间____ 2014.6.28 ___
一、工作原理与结构组成
 牛头刨床是用于加工中小尺寸的平面或直槽的金属切削机床,多用于单件或小批量生产。
牛头刨床是用于加工中小尺寸的平面或直槽的金属切削机床,多用于单件或小批量生产。
为了适用不同材料和不同尺寸工件的粗、精加工,要求主执行构件—刨刀能以数种不同速度、不同行程和不同起始位置作水平往复直线移动,且切削时刨刀的移动速度低于空行程速度,即刨刀具有急回特性。刨刀可随小刀架作不同进给量的垂直进给;安装工件的工作台应具有不同进给量的横向进给,以完成平面的加工,工作台还应具有升降功能,以适应不同高度的工件加工。
 二、设计对象
二、设计对象
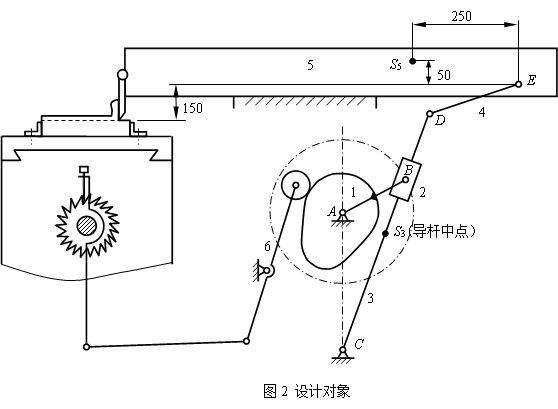
牛头刨床是一个复杂的系统,本课程设计将设计对象进行简化。如图2所示,要求对实现刨刀往复运动的主执行机构进行运动学尺度设计和运动学、动力学性能分析。图中给出了切削力作用点、导杆质心S3、滑枕质心S5相对于铰链E的位置。
三、设计要求及设计参数
要求主执行机构工作行程切削平稳、压力角较小。进给机构压力角不超过许用值。设计参数如表1所示。
表1 牛头刨床设计参数
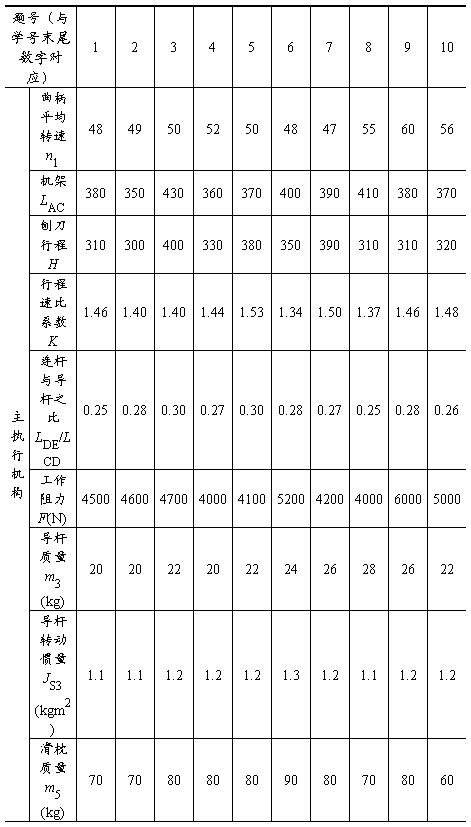
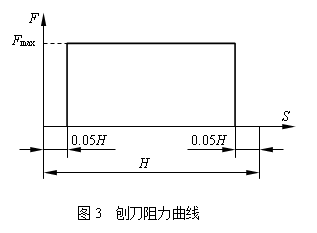
刨刀阻力曲线如图3所示。刨刀在切入、退出工件时均有0.05H的空载行程。
四、设计内容及步骤
1、解:主执行机构的设计计算
K=180°(Θ-1/Θ+1)
Θ=37°
LAB=LAC* =117,LBC= LAC*
=117,LBC= LAC* =351
=351
LCD= LD1D2/2/, 


取 ,得到安全角α=10°
,得到安全角α=10°
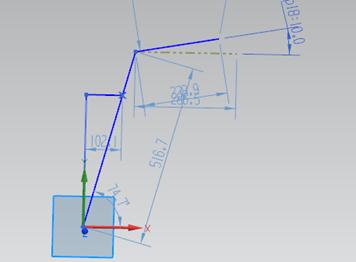
2、用解析法对刨刀进行运动分析
解:令杆AB与水平面夹角为 ,CD杆和水平面夹角为
,CD杆和水平面夹角为 ,DE杆和水平面夹角为
,DE杆和水平面夹角为 。
。
AB、CD、DE杆的角速度分别为 ,以C为原点做X—Y坐标系。
,以C为原点做X—Y坐标系。
由封闭图形ABCA在坐标轴上的投影可得

 ,
,
 ,
,
将上式求导得: ,
,
再将上式求导得: ,
,
根据在坐标轴上的投影可得:
 ,
,
 ,
,
将上式求导得 ,
,
再将上式求导得:

源程序代码及运行结果
x1=linspace(0,2*pi,360);
l l1=117
l3=599;
l4=178;
l6=370
y=600;
w1=5/3*pi;
x3=atan((l6+l1*sin(x1))./(l1*cos(x1)));
for i = 1:360;
if x3(i)<0
x3(i)=x3(i)+pi;
end
end
s3=l1*cos(x1)./cos(x3);
w3=w1*l1*cos(x1-x3)./s3;
a3=l1*l6*w1.^2*(l6^2-l1.^2)*cos(x1)./(l1.^2+l6.^2+2*l1*l6*sin(x1)).^2
x4= asin((y-l3*sin(x3))./l4);
for i = 1:360;
if x4(i)<0
x4(i)=x4(i)+2*pi;
end
end
se=l3*cos(x3)+l4*cos(x4);
w4=(-1)*w3.*l3.*cos(x3)./(l4.*cos(x4));
ve=(-1)*w3.*l3.*sin(x3-x4)./cos(x4);
a4=(w3.^2.*l3.*sin(x3)+w4.^2.*l4.*sin(x4)-a3.*l3.*cos(x3))./(l4.*cos(x4));
ae=(-1)*(a3.*l3.*sin(x3-x4)+w3.^2.*l3.*cos(x3-x4)-w4.^2.*l4)./cos(x4);
th=x1*180/pi
ae1=ae./1000
subplot(2,2,1)
plot(th,se)
xlabel('曲柄位置 (°)'),ylabel('刨刀位置(mm)');
grid on
title('刨刀位置线图');
subplot(2,2,2)
plot(th,ve)
grid on
xlabel('曲柄位置 (°)'),ylabel('刨刀速度(mm/s)');
title('刨刀速度线图');
grid on
subplot(2,2,3)
plot(th,ae1)
xlabel('曲柄位置 (°)'),ylabel('刨刀加速度(m/s^2)');
title('刨刀加速度线图');
grid on
subplot(2,2,4)
plot(th,a3)
xlabel('曲柄位置 (°)'),ylabel('角加速度(rad/s^2)');
title('导杆角加速度线图');
grid on
编程图
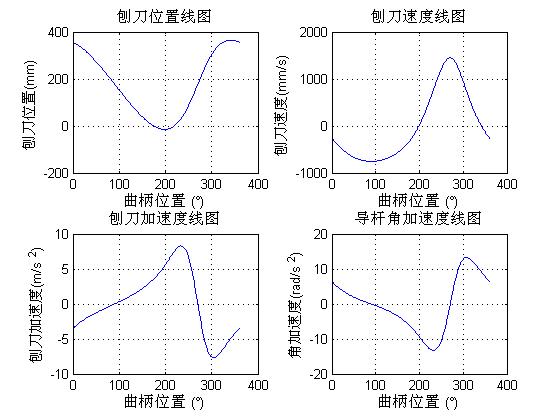
图表 1-0
图解法验证:
当 时,如下三图:
时,如下三图:
各机构如上图所示.
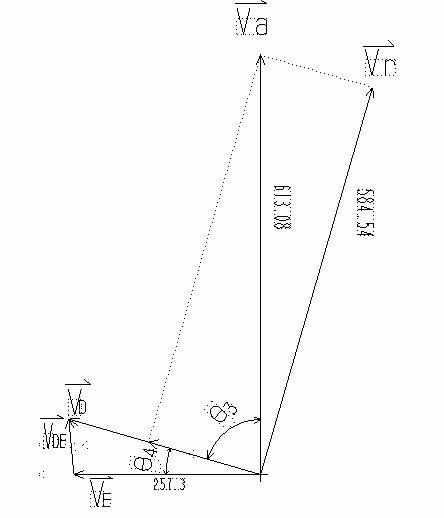
图表 2-1
由图1-1得: ,
,


与图1-0相符.
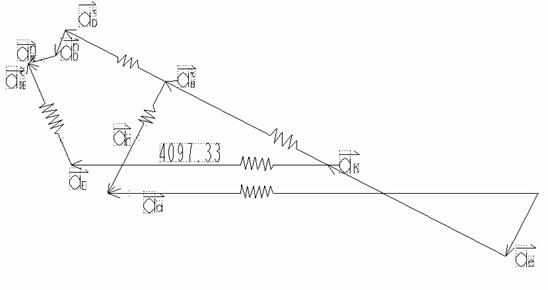
加速度如图所示为4093.77与上图1-0相符.
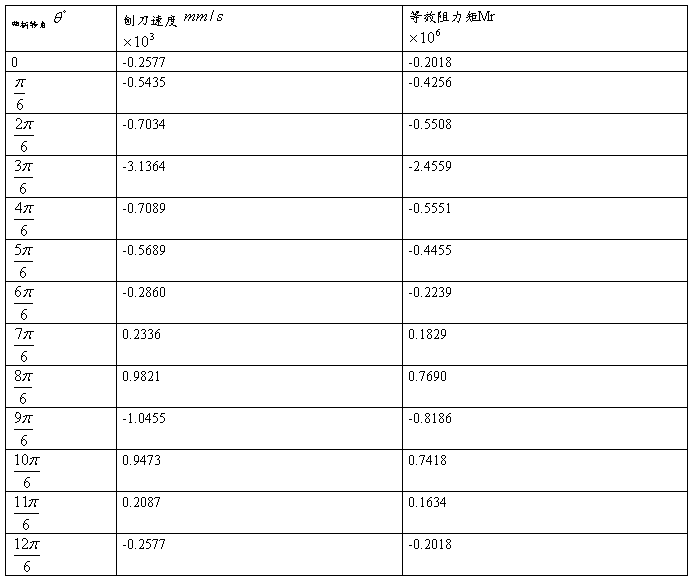
12点法确定飞轮转动惯量:
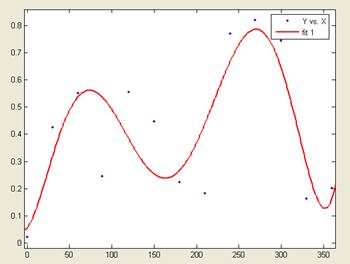 拟合曲线如图
拟合曲线如图
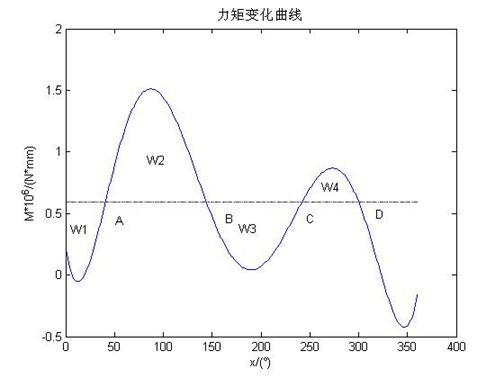
由程序得Md=0593*

由图可知,交点分别为A(X=41),B(X=145),C(X=238),D(X=308).
由程序算出盈亏功W1=6.08*
 ,W2=1.21*
,W2=1.21* ,W3=2.10*W4=51.18,剩余W5=-7.54*
,W3=2.10*W4=51.18,剩余W5=-7.54* .
.
最大盈亏功[W]=36670* /180=640.01
/180=640.01
 =
= ,取速度不均匀系数为0.01,
,取速度不均匀系数为0.01,
=2334.48 为飞轮转动惯量
为飞轮转动惯量
课程小结:
通过几天的奋斗,在老师悉心的指导下,在同学们的密切配合下,我的机械原理课程设计终于完成了。虽然我的设计可能还有不少的错误和误差,但心中还是无比的喜悦。
在这几天中,我有很多的体验,同时也有我也找到许多的毛病,比如:专业知识的不能熟练应用,作图时不图不是太合理。但是通过这次实践设计,我觉得我的能力有了很打的提高。比如:通过这次设计我学会了查找一些相关的工具书,并且巩固复习了一些设计数据的计算方法(速度、加速度、力)。
自己的第一次设计,其中肯定有很多的不足,希望在今后的设计中,能够得到正真的提升,使自己的设计能力进一步趋向成熟。当然我也会努力学习让自己的专业知识日益深厚。我在这次设计中感到了团队合作的重要性。这将使我受益终生。
“功到自然成.”只有通过不锻炼,自己才能迎接更大的挑战和机遇,我相信我自己一定能够在锻炼成长。人生中会遇到很多的问题和坎坷,无论它们有多么的棘手,但我相信,只要努力,成功就一定会在眼前!
参考文献:
1、 马履中.机械原理与设计(上册).北京:机械工业出版社,2009.
2、 王湘江,何哲明.机械原理课程设计指导书.长沙:中南大学出版社,2011.
第二篇:机械原理课程设计2
机械原理课程设计2
题目7:专用精压机设计(4人)
(一)、工作原理及工艺动作过程
专用精压机是用于薄壁铝合金制件的精压深冲工艺,它是将薄壁铝板一次冲压成为深筒形。如图1(a)所示,上模先以比较小的速度接近坯料,然后以匀速进行拉延成形工作,以后,上模继续下行将成品推出型腔,最后快速返回。上模退出下模以后,送料机构从侧面将坯料送至待加工位置,完成一个工作循环。它的主要工艺动作有:
(1) 将新坯料送至待加工位置;
(2) 下模固定、上模冲压拉延成形将成品推出膜腔。
(a) (b)
图1 加工工件及上模运动规律
(二)、原始数据和设计要求
(1) 动力源是电动机,作转动;冲压执行构件为上模,作上下往复直移运动,其大致运动规律如图1(b)所示,具有快速接近工件、等速工作进给和快速返回的特性。
(2) 精压成形制品生产率约每分钟70件。
(3) 上模移动总行程为280 mm,其拉延行程置于总行程的中部,约100 mm。
(4) 行程速比系数K≥1.3。
(5) 坯料输送的最大距离200 mm。
(6) 上模滑块总质量40 kg,最大生产阻力为5000 N,且假定在拉延区内生产阻力均衡;
(7) 设最大摆动件的质量为40kg/mm,绕质心转动惯量为2 kg?m2/mm,质心简化到杆长的中点。其它构件的质量及转动惯量均忽略不计;
(8) 传动装置的等效转动惯量(以曲柄为等效构件,其转动惯量设为30 kg?m2,机器运转许用不均匀系数[δ]为0.05)
(9) 机构应具有较好的传力性能,特别是工作段的压力角 应尽可能小,传动角 大于或等于许用传动角 。
(三)、方案设计及讨论
(1) 送料机构实现间歇送料可采用凸轮机构、凸轮—连杆组合送料机构、槽轮机构等。
(2) 冲压机构为保证等速拉延、回程快速的要求,可采用导杆加摇杆滑块的六杆机构、铰链四杆加摇杆滑块的六杆机构、齿轮—连杆冲压机构等。
(3) 工件送料传输平面标高在1000mm左右。
(4) 需考虑飞轮设计。
(四)、设计任务及要求
(1) 根据工艺动作要求拟定运动循环图;
(2) 进行送料机构、冲压机构的选型;
(3) 机械运动方案的评定和选择;
(4) 根据选定的原动机和执行机构的运动参数拟定机械传动方案,分配传动比,并画出传动方案图;
(5) 对机械传动系统和执行机构进行运动尺寸计算;
(6) 画出机械运动方案简图;
(7) 对执行机构进行运动分析,画出运动线图;
(8) 进行飞轮设计;
(9) 编写设计计算说明书。
1、工作原理及工艺动作过程
半自动平压模切机是印刷、包装行业压制纸盒、纸箱等纸制品的专用设备。它可对各种规格的纸板、厚度在4 mm以下的瓦楞纸板,以及各种高级精细的印刷品进行压痕、切线、压凹凸。经过压痕、切线的纸板,用手工或机械沿切线处去掉边料后,沿压出的压痕可折叠成各种纸盒、纸箱,或制成凹凸的商标。
它的工艺动作主要有两个:一是将纸板走纸到位,二是进行冲压模切。
2、原始数据和设计要求 '
1)每小时压制纸板3000张。 2)上模固定,下模向上移动的行程长度H=50±0.5 mm,回程的平均速度为工作行程的平均速度的1.3倍。
3)工作行程的最后2 mm范围内受到生产阻力Pc=2x1O6 N,回程时不受力。下模和滑块的质量共约120kg。
4)工作台面离地面的距离约120 mm。
5)所设计的机构性能要良好,结构简单紧凑,节省动力,寿命长,便于制造。3、设计方案提示
1)走纸机构可采用双列链传动,走纸横块其两端分别固定在前后两根链条上,横块上装有若干夹紧片以夹紧纸板。主动链轮由间歇运动机构带动以实现定时走纸。
2)模切机构一般可采用六杆冲压机构,在纸板停顿时进行冲压模切。冲压机构要求急回并节省动力。
3)由于冲压模切机构仅在短时内承受很大生产阻力,为了减小周期性速度波动可选用较小容量的电机,一般需安装飞轮。4、设计任务
1)根据工艺动作要求拟定运动循环图。
2)进行送料、模切机构的选型。
3)机械运动方案的评定和选择。
4)根据给定的生产阻力及工作裕量选定合适的电动机。
5)进行飞轮设计。
6)按选定的电动机和执行机构运动参数拟定机械传动方案。
7)画出机械运动方案简图。
8)对传动机构和执行机构进行运动尺寸计算。
题目3:剪板机设计(4人)
(一)、工作原理及工艺动作过程
剪板机是将卷料展开并剪成一定长度铁板的机器,即将板料作定长度的间歇送进,在板料短暂的停歇时间内,剪刀在一定位置上将铁板剪断。因此剪板机主要包括铁板输送机构和剪断机构。
(二)、原始数据及设计要求
(1) 原材料为成卷的板料。每次输送铁板长度为L=1900或2000或2200 mm(设计时任选一种)。
(2) 每次输送铁板到达规定长度后,铁板稍停,以待剪板机构将其剪断。剪断工艺所需时间约为铁板输送周期的十五分之一。建议铁板停歇时间不超过剪断工艺时间的1.5倍,以保证有较高的生产率。
(3) 输送机构运转应平稳,振动和冲击应尽量小(即要求输送机构从动件的加速度曲线连续无突变)。
(三)、方案设计提示
将铁板作间歇送进的机构方案设计,可从下述两个方面考虑机构的选择:
(1) 如何夹持和输送铁板,并使停歇时保持铁板的待剪位置;
(2) 如何实现间歇送进,并能使铁板停歇时运送铁板的构件的速度和加速度曲线仍然连续,这样,送进机构的运转就比较平稳。
大致有几条途径:
(1) 利用机构中运动构件暂时脱离运动链,使后续构件实现停歇;
(2) 利用构件上一点在圆弧段或直线段上运动,使与之相连的构件实现停歇;
(3) 利用两种运动的叠加使构件实现间歇运动;
(4) 其它。
工业上常用的简单间歇机构,如棘轮机构、槽轮机构和不完全齿轮机构等,虽具有结构简单、制造方便。运动可靠等优点,但在动力性能、动停比(运动时间和停歇时间之比)方面很难满足设计要求。所以常用组合机构来满足设计要求。
(四)、设计任务及要求
(1) 根据工艺动作顺序和协调要求拟定运动循环图;
(2) 进行铁板输送机构和剪断机构的选型;
(3) 机械运动方案的评定和选择;
(4) 根据选定的原动机和执行机构的运动参数拟定机械传动方案,分配传动比,并在图纸上画出传动方案图
(5) 对机械传动系统和执行机构进行运动尺寸计算;
(6) 对执行机构进行运动分析,画出运动线图;
(7) 画出机械运动方案简图;
(8) 编写设计计算说明书。
搅 拌 机
一、机构简介与设计数据
1. 机构简介
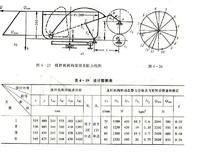
搅拌机常应用于化学工业和食品工业中对拌料进行搅拌工作。如图4-25a所示,电动机经过齿轮减速,通过联轴节(电动机与联轴节图中未画)带动曲柄2顺时针方向回转,驱使曲柄摇杆机构1-2-3-4运动;同时通过涡轮蜗杆带动容器绕垂直轴缓慢转动。当连杆3运动时,固联在其上的拌勺E即沿图中虚线所示轨迹运动而将容器中的拌料均匀搅动。
工作时,假定拌料对拌勺的压力与深度成正比,即产生的阻力按直线变化,如图4-25,b所示。
2.设计数据
见表4-19
二、设计内容
1.连杆机构的运动分析
已知 各构件尺寸及重心S的位置,中心距x,y,曲柄2每分钟转数n2。
要求 作机构两个位置(见表4-20)的运动简图、速度多边形和加速度多边形,拌勺E的运动轨迹。以上内容与后面动态静力分析一起画在1号图纸上。
曲柄位置图的作法,如图4-26所示:取摇杆在左极限位置时所对应的曲柄作为起始位置1,按转向将曲柄圆周作十二等分,得十二个位置。并找出连杆上拌勺E的各对应点E1、E2、……E12,绘出E点轨迹。按拌勺E点运动轨迹的最低点向下量40毫米定出容器底面的位置,再根据容器高度定出容器顶面位置。并求出拌勺E离开及进入容器所对应两个曲柄位置8和11。
2.连杆机构的动态静力分析
已知 各构件的重量G及对重心轴的转动惯量Js(构件2的重量和转动惯量略去不计),阻力线图(拌勺E所受阻力的方向与E点的速度方向相反),运动分析中所得结果。
要求 确定机构两个位置(同运动分析)的各运动副反力及加于曲柄上的平衡力矩。以上内容作在运动分析的同一张图纸上。
3.飞轮设计
已知 机器运转的不均匀系数δ,由动态静力分析所得的平衡力矩My;驱动力矩为常数。 要求 用惯性力法确定安装在齿轮2轴上的飞轮转动惯量JF以上内容作在2号图纸上。
该题目每班不超过四人选作,每人位置不能重复。
一、机构简介与设计数据
1.机构简介
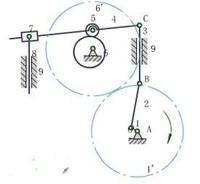
颚式破碎机是一种用来破碎矿石的机械,如图所示。机器经带传动(图中未画)使曲柄2顺时针方向回转,然后通过构件3、4、5使动颚板6作往复摆动。当动颚板6向左摆向固定于机架1上的定颚板7时,矿石即被轧碎;当动颚板6向右摆离定颚板7时,被轧碎的矿石即落下。由于机器在工作过程中载荷变化很大,将影响曲柄和电动机的匀速转动。为了减少主轴速度的波动和电动机的容量,在曲柄轴O:的两端各装一个大小和重量完全相同的飞轮,其中一个兼作带轮用。
2.设计数据
设计数据见表9—4。
表9-4设计数据
设计
内容 连杆机构的运动分析
符号 n2
单位 r/min mm
数据 170 100 1000 940 850 1000 1250 1000 1150 1960
连杆机构的动态静力分析 飞轮转动惯量的确定
mm N Kg?m2 N Kg?m2 N Kg?m2 N Kg?m2
600 5000 25.5 2000 9 2000 9 9000 50 0.15
二、设计内容
1.连杆机构的运动分析

已知:各机构尺寸及质心位置(构件2的质心在02,其余构件的质心均位于构件的中心),曲柄转速为n2
要求:作机构运动简图,机构2个位置的速度和加速度多边形。以上内容与后面的动态静力分析一起画在1号图纸上。(起始位置为曲柄2的左水平位置,每隔50度为一个设计位置)
2.连杆机构的动态静力分析
已知:各构件重力G及对质心轴的转动惯量Js;工作阻力F,曲线如图9-5所示,F,的作用点为D,
方向垂直于06C;运动分析中所得结果。
图9-5
要求:确定机构一个位置的各运动副反作用力及需加在曲柄上的平衡力矩M 。以上内容和运动分析作在同一张1号图纸上。
3.飞轮设计
已知:机器运转的速度不均匀系数δ,由动态静力分析所得的平衡力矩M 以及驱动力矩
Mb为常数。
要求:确定安装在轴02上的飞轮的转动惯量J 。以上内容作在2号图纸上。
B.创新性设计题目
请结合下列实际设计问题,选择自己感兴趣的题目,并通过需求背景调查进一步明确设计目标和功能要求,综合运用所学知识完成如下工作:
1. 针对自己确定的创新性设计题目,拟定设计方案,并详细说明工作原理和工艺动作过程;
2. 机构结构分析与综合,计算机构自由度,进行机构运动分析和设计计算,确定机构运动参数和构件尺寸;
3. 绘制机构运动简图和运动循环图,绘制主要机构的运动线图(s,v,a);
4. 编写设计计算说明书。
题目一
结合自己身边学习和生活的需要,设计一折叠式床头小桌或窗外伸缩式晾衣架,或一收藏式床头书架或脸盆架或电脑架等;
题目二
设计一能帮助截瘫病人独自从轮椅转入床上或四肢瘫痪已失去活动能力的病人能自理用餐或自动翻书进行阅读的机械;
题目三
设计适合老、中、青不同年龄段使用并针对不同职业活动性质(如坐办公室人员运动少的特点)的健身机械;
题目四
设计帮助运动员网球或乒乓球训练的标准发球机或步兵步行耐力训练,或空军飞行员体验混战演习训练(即给可能的飞行员各方位加一个重力),或宇航员失重训练(即能运载一人并提供一个重力加速度)的模拟训练机械;
题目五
设计放置在超市外投币式的具有安全、有趣或难以想象的运动的小孩“坐椅”或能使两位、四位游客产生毛骨悚然的颤动感觉的轻便“急动”坐车。
题目六
汽车夏天露天停车,设计一伞状机械装置,为汽车遮挡阳光。
题目七 手动剪扩钳
设计一个手动剪扩钳机构,要求该两用钳启动方便,剪切能力大,可在任何姿势下使用,钳臂及钳刃强度高,坚固耐用,使用快捷便利。最大剪切力:190000 N,最大扩张力:16000 N。
题目八 救援切割器
设计一款救援用切割器,该切割器主要由电机、减速转向机构、偏心往复机构、导向滑动机构和刀锯组成。切割器功率为60W-2kW。切割工作部分为了能使用某些特定工作场合,要求能转动一定角度,最大转动角度可达90°。
题目九 高楼逃生自救装置
当突发火灾或地震时,居住在高楼的人因事前无准备往往难以逃生,因此请依题设计一种高层建筑窗用逃生装置,要求结构简单、可靠性高、承载能力强。
题目十 多功能担架
设计一种可用于崎岖路上手抬、平路上手推、静止时可作休息的小床或座椅的多功能担架。
1. 题目:自动打印机
2. 工作原理及工艺动作过程
对于包装好的纸盒上,为了商品某种需要而打印一种记号。它的动作主要有三个:送料到达打印工位;然后打印记号;最后将产品输出。
3. 原始数据及设计要求
1)纸盒尺寸: 长100~150mm、宽70~100mm、高30~50mm;
2)自动打印机的生产率: 80次/min;
3)驱动电机:Y90S-4,功率N=1.1Kw ,转速n=1400r/min。
4. 设计任务
a) 执行机构选型与设计:构思出至少3种运动方案,并在说明书中画出运动方案草图,经对所有运动方案进行分析比较后,选择其中你认为比较好的方案进行详细设计,该机构最好具有急回运动特性。
b) 对选择的方案画出机构运动循环图
c) 传动系统的设计 d)
对选择的方案进行尺寸设计
e) 用ADAMS或SOLIDWORKS软件对机构进行运动仿真
f) 用ADAMS或SOLIDWORKS软件对机构进行运动学分析,并画出输出机构的位移、速度、和加速度线图。
g)
在2号图纸上画出最终方案的机构运动简图。
题目三:压力机
已知在压力机中,设1杆曲柄长度为20,2杆长度为150,3杆长度为150,两齿轮中心距为250,最后完成:
a.完成机构中的结构设计
b.对选择的方案画出机构运动简图
c.用ADAMS机构进行运动仿真
d.用ADAMS对机构进行运动学分析,并画出输出机构的位移、速度、和加速度线图。 e.编制设计计算说明书