智能清洁机器人的研发和推广应用
学院:机械工程学院
班级:机自097(车辆)
姓名:韩涛
学号:0908030161 摘要:清洁机器人又称智能吸尘机器人或自动吸尘器,它涉及到机械、电子和计算机等知识,是将移动机器人技术和清洁技术融为一体、仿人体清洁动作的高新技术产品。它不仅节省了劳动力资源,而且还解决了人类在复杂恶劣的环境之下不能持续工作的问题。近年来随着科技和社会的不断进步和发展,已受到国内外的重视,成为服务性机器人一个新的研究方向,也成为目前家用电器领域最具挑战性的热门研发课题。
关键词:智能化、自动化、清洁机器人、应用领域、发展前景。
引言:二十一世纪是清洁环保的时代,中国新兴的清洗产业必将迅猛发展。当今,各种绿色、环保的清洗技术不断地推出,新型产品和机械设备不断涌现,清洗产业也几乎渗透到所有的工业领域,以及社会生活地各个方面,直至深入到人们的日常衣食住行中。
人类生活水平不断提高的今天,无论从环境美化、节能增效、还是从人们精神生活需要的角度,清洁业的全面进步已经并正在成为市场经济发展不可缺少的推动力,能为社会环保事业做出不可忽视的贡献。
1、清洁机器人的工作原理和特点
原理:该产品由微电脑控制,可实现自动导航并对地面进行清扫和吸尘,通过碰撞头实现对前方障碍物的躲避和绕过可以使所到角落得到清洁,同时两个超大边扫轮的设计,可使角落和地面扫的更彻底,更干净,两个清扫轮的相对旋转,更使得垃圾不会从机体底部溜掉,清洁更完善,同时清扫吸尘一体的双重作用,使扫起来的尘土更有规律和顺畅的进入垃圾收集盒内,并且通过在前轮和清扫轮动力箱内上安装光电传感器,可以使该机器人拥有自动防机体卡死和扫轮卡死的功能,当被卡住使其自动后退或关机,并在碰撞头上装有红外反射探测器,可自动判断前方是否悬崖,并自动绕开。
特点:(1)扫地省时、省力、提高工作效率、能源利用率:整个清洁过程不需要人控制,减轻人的操作负担,人们可以利用节省的时间做其他有意义的事。
(2)低噪音:小于50分贝,清洁房间的过程免受噪音之苦。
(3)净化空气:内置活性碳、吸附空气中有害物质。
(4)轻便小巧:轻松打扫普通吸尘器清理不到的死角。
2、国内外清洁机器人的发展过程及现状
目前在欧美日等发达国家,吸尘机器人开发较早,应用范围也较广,近些年,已经开发出多种面向市场的智能吸尘机器人。如日本产吸尘器、澳大利亚的V4 吸尘机器人、瑞士三叶虫吸尘器、美国伦巴(Roomba) 吸尘器、韩国推出的ICLEBO。 继国内全力推出KV8智能清洁机器人,各款清洁机器人都相继推出,功能也在不断的完善,虽然在反映灵敏度有些不如欧美,价格上却占了很大的优势,性价比是最高的的。符合我们中国国情,是我们的大众产品,也是受国内众多消费者青睐的最重要的原因。同时,很多高等院校也对清洁机器人作乐很多的研究工作,并取得了很大的成果。但是我国在这方面的研究技术仍旧落后于欧美国家。 3、清洁机器人存在的问题 (1) 目前,价格过高是严重影响清洁机器人打入家电市场的主要因素, 为了大幅度降低其成本,必须开发智能传感器、专用运动控制的数字处理芯片; 其次, 应该看到蓝牙技术在家电行业的应用前景,通过采用蓝牙技术将过高的数字处理器成本转移到用户的个人电脑上,则有望在短期内将吸尘机器人的成本降低在千元左右。
(2) 未来的清洁机器人将向自主式和人工智能化发展, 因此必须结合现有的基于自适应控制、预测控制、模糊逻辑、神经网络等移动机器人运动规划和控制技术,研究对环境障碍物具有安全可靠的防碰撞功能的智能运动规划与控制器及高效的传感器融合算法,是在现实环境中实现具有良好的自适应性行为的机器人的关键。 (3) 电源技术是吸尘机器人研究工作的核心问题之一, 除了为机器人运动、吸尘及控制电路提供能量外, 还需优化自动充电方案, 保证机器人能及时进行充电,能够自动完成对指定环境的吸尘任务。在研究提高化学电池使用寿命、缩小体积的同时, 一种新兴的质子交换膜燃料电池具有功率大、能量高、寿命长和体积小等优点, 为移动电源提供了一种合适的电源 。
4、清洁机器人的应用前景和研究意义
清洁机器人作为服务性机器人的一种,能够使人们从繁重的清洁工作中解脱出来,具有广泛的应用前景。
作为令人满意的智能清洁机器人,它具有能自动并彻底清洁家庭或办公室中它能走得到的地面的功能,不需要人弯着腰操作;不需要人拖着电线移来移去;不需要人把它拆开把累积在内部的垃圾倾倒出来;不需要人在旁边忍受它的噪音,需要的只是人们一次性设定它的工作方式:一次性工作还是每天工作一次、还是隔天工作、每次工作在什么时刻,其余人们便不用管它。它能自动充电、自动把内部垃圾传送到一个大容量垃圾箱中去。同时它还很安全:不会有触电危险、不会撞坏东西、不会被撞坏、不会跌落至楼梯下、也不会走得太远而消失得无影无踪。基于上述的优点,清洁机器人必然会广泛应用于家庭和工作环境以及公共场合,实现其很高的应用价值。
结论:随着清洁机器人关键技术和性能价格比的不断提高或改进, 相信在现有的软硬件条件的基础上,未来几年内就会推出价格适中的全自动清洁机器人产品,进而使清洁器人能像普通家电产品一样走进千家万户,为广大群众制造方便,创造幸福,为这一高新技术产品带来可观的市场和经济效益。
参考文献
【1】胡跃明,丁维中,吴忻生.吸尘机器人的研究现状与展望[J ] .机器人技术与应用,2002 5(1).
【2】石为人,周学益.室内清洁机器人避障路径规划研究[J].计算机应用,2007,27(6):378—379.
【3】陆新华,张桂林.室内清洁机器人导航方法研究[J ].2003 ,25(1) :80 - 87.
【4】卢韶芳,刘大维.自主式移动机器人导航研究现状与相关技术[J].机械学报,2002 ,33(2).
第二篇:室内智能清洁机器人的研究
绍兴文理学院元培学院
文献综述
题 目 室内智能机器人的研究 专业班级 机自1001班
学生姓名 李栋栋
20xx年6月3日
室内智能清洁机器人
李栋栋(绍兴文理学院元培学院机自1001班)
1、前言
随着社会的进步和发展,人们的学习、工作越来越繁忙,于是怎样更大程度地将人们从烦琐的日常事物中解脱出来,就成了新一代家电所追求的目标而智能化正是这一目标的集中体现本文介绍的智能吸尘器初步实现了无人情况下的自主工作方式,很大程度地提高了产品的自动化水平。
清洁机器人系统的基本结构一般包括四部分:控制系统、移动机构、感知系统、清洁系统。随着计算机技术、人工智能技术、传感器技术、移动机器人技术的飞速发展,为清洁机器人的控制系统的研究和开发打下坚实的理论与技术基础以及美好的未来发展蓝图;感知系统依赖于传感器技术,一般常用的传感器有:CCD摄像机、超声波传感器、红外传感器、接近传感器和碰撞传感器等,感知外部的环境信息;移动机构是清洁机器人的本体,一般的结构有:轮式、履带式、步进式或其他方式,轮式和履带式适合移动在平整的地面上,步进式适合与条件较差的路面移动;清扫系统一般有:喷水器、地刷和吸尘器,喷水器向地面喷洒清水,地刷用于强力清扫地板上的吸附物,吸尘器吸取地板上较小的物体。近年来快速发展、深刻影响着清洁机器人进步的关键技术有:路径规划技术、传感器技术、吸尘技术、控制技术、电源技术等[1]。
2、主题
1 总体原理
该智能吸尘器利用了超声波测距的原理,通过向前进方向发射超声波脉冲,并接收相应的返回声波脉冲,对障碍物进行判断;通过以单片机为核心的控制器实现对超声发射和接收的选通控制,并在处理返回脉冲信号的基础上加以判断,选定相应的控制策略;通过驱动器驱动两步进电机,带动驱动轮,从而实现避障
功能与此同时,由其自身携带的小型吸尘部件,对经过的地面进行必要的吸尘清扫
2 功能实能
整个吸尘器原理上可以分为五个主要部分(如图1)[2]:传感器部分、控制器部分、驱动部分、吸尘部分和电源部分各部分的原理及具体功能实现如下:

3超声波测距原理[3]
超声波是一种一定频率范围的声波它具有在同种媒质中以恒定速率传播的特性,而在不同媒质的界面处,会产生反射现象利用这一特性,就可
以根据测量发射波与反射波之间的时间间隔,从而达到测量距离的作用其具体的计算公式如下:
s=v×t/2
其中,s为障碍物与吸尘器之间的距离;t为发射到接收经历的时间;v为声波在空气中传播的速度由于v的值受温度的影响会波动,因此,在实际的应用中可以用以下公式来加以补偿,其中T表示空气的绝对温度,m/s为速度单位
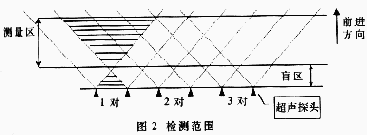
在智能吸尘器中,避障功能的实现正是利用了这一超声波测距的原理它的传感器部分由三对(每对包括一个发射探头和一个接收探头)共六个超声波传感头组成由单独的振荡电路产生频率固定为40kHz,幅值为5V的超声波信号在控制器送来的路选信号(如图1)的作用下,40kHz的振荡信号被加在超声发射探头的两端,从而产生超声信号向外发射;该信号遇到障碍物时,产生反射波,当这一反射波被接收探头接收后,根据前述测距的原理,就可以精确地判断障碍物的远近;同时,根据信号的幅值大小,也可以初步确定障碍物的大小 4 路径规划
由于每一个超声波探头都有一定的指向性(即发射或接受的空间范围),所以在测量时必然存在盲区(如图2)因此,三对传感器必然以一定的尺寸分布在吸尘器的前端,从而使传感器测量的范围包含整个吸尘器所必须经过的空间,同时又避免探测死角(既使盲区落在须测量的范围之外)
5清洁机器人的定位[4]

图3清洁机器人运动轨迹分析
该清洁机器人的定位是基于光电编码器的“车轮脉冲定位”方式的。根据清洁机器人的工作环境,建立一个以地面为XY平面,以一个运动周期开始时清洁机器人的中心为原点的直角坐标系,在此运动周期结束时进行一次计算,用来描述清洁机器人在一个运动周期后相对于这个运动周期前位姿的变化情况。清洁机器人只在XY平面内做二维平面运动,
;s
6防止干扰
由于三对超声波传感探头之间的安装距离比较近,

因而存在相互干扰的问题为了解决这一问题,
在设计中引进了循环扫描的方式既循环地对每组探头施加发射和接收,当一组工作时,其余两组停止循环周期由路选信号来控制,只有15ms(即在15ms的时间里完成一次对三组探头的扫描),因而在实际应用中很可靠
7控制部分[5]
控制部分的核心是MC51单片机,它主要完成三个部分的任务:
· 向传感器部分(三路)分别送路选信号:当路选信号是高电频时,该路导

通;反之,就截止这样,通过路选信号,就可以完成三路信号的顺序扫描以及对发射和接收的计时功能
· 作为控制器的核心,它要根据接收的信号(左、中、右三路)的幅值,以及从发射到接收的时间间隔,计算并判断障碍物的相对位置,大致大小在此基础上,根据事先设定的规则,选定相应的避障措施(前进、左转、右转、后退、调头)
· 最后,在确定了避障措施后,要向步进电机的控制器输出相应的控制脉冲,以具体实现避障
8 驱动部分
驱动部分是由两个四相步进电机以及相应的驱动机构组成的步进电机带动两驱动轮(后轮),从而推动吸尘器运动前轮不再采用传统的双轮结构,而采用了应用非常广泛的平面轴承,这既减小了结构复杂度,又提高了转弯的灵活性(如图3)通过改变作用于步进电机的脉冲信号的频率,可以对步进电机实现较高精度的调速同时在对两电机分别施加相同或不同脉冲信号时,通过差速方式,可以方便的实现吸尘器前进、左转、右转、后退、调头等功能这一设计的最大优点是吸尘器能够在任意半径下,以任意速度实现转弯,甚至当两后轮相互反向运动时,实现零转弯半径(即绕轴中点原地施转)同时转弯的速度可通过改变单片机的程序来调节

由于智能吸尘器是边行走边工作的,所以要求速度很低,一般要求5m/min左右,而步进电机为避免低速爬行,其转速又不能太低,为此,在电机轴与轮轴之间采用了一级齿轮传动,设计传动比为3.7设电机的转速为n(转/秒),驱动轮的半径为r(米),则驱动轮的前进速度为:
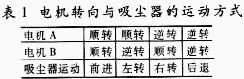
式中,vkk=12,代表左右驱动轮的线速度;i——齿轮传动比通过调节n的大小和正反,可以实现vk的连续变化,从而实现任意半径的转弯电机转向与吸尘器的运动方式的关系如表1
9吸尘器部分
吸尘功能是由封闭在壳体中的小型吸尘器完成的包括气泵、吸室、吸道和吸嘴在吸尘器爬行的过程中,通过底盘上开的吸嘴将扫过的地面上的灰尘吸入吸室
10电源部分
由于智能吸尘器是以自主方式工作的,因而所用的电源不是一般拖线方式,而是采用随身携带的蓄电池(3A/20hour)这样不但可实现无人控制,而且工作时较灵活一次充电可以连续工作几个小时
11 超声信号发生
40kHz的超声波信号是由555芯片构成的多谐振荡电路产生的(如图4)由R1、R11、R12和C1构成外围的充放电电路;当参数漂移时,通过调节R12的阻值,可微调信号的中心频率

12步进电机驱动
由控制器输出的驱动脉冲信号经7404反向后,驱动功率三极管从而带动步进电机图5列出了一相的驱动电路由于有两个步进电机,每一电机按四相八拍制工作,因而共有八组驱动电路
3 结论与展望
虽然当前的吸尘器是物美价廉,能给人们枯燥乏味的家庭清洁的琐碎工作提供了诸多方便,可是一些缺点仍旧困扰着人们,比如较大的噪声依然让多数的家庭使用者望而却步。在现有的服务机器人领域里,吸尘机器人可以说是一种新型产品,帮助人们在无需照看的情况下省时省力的完成房间的洗尘清扫作业。所以,只要清洁机器人的生产成本兼顾日用家电的大批量、低价格的特点,吸尘机器人将会用诱人的市场前景。
目前国内与国外的吸尘机器人的研究与开发工作都取得了一些成绩,但是仍旧有许多问题需要解决或改善,主要涉及到下面几个方面:
(1)格过高
(2)智能化与自主化程度低
(3)吸尘技术不够理想
(4)自动充电与电源技术有待改进
伴随着吸尘机器人的关键技术与性价比的不断提高,完全有条件基于现有的硬件和软件技术,在不久的将来,生产出价格便宜的全自动吸尘机器人,使千家万户都能够使用到,从而使这种高新技术产业带来客观的市场和经济效益。
智能吸尘器开启了不用人工打扫,死角可以不用花大力气去清除的时代,人类的不用亲自动手就可以将房间打扫的干干净净,可谓是对于机器,“懒汉时代”有迈进了一大步[6]。
参考文献
[1]谭定忠. 王启明。李金山。李林清洁机器人研究发展现状。(哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001) 2004[A]
[2] 邢敏,蒙梅,刘任平JP~cleaner型清洁机器人控制系统设计(北京交通大学,北京100044) 2006[A]
[3] 王以伦,邓宝林,王洪涛,冯晨。清洁机器人的自动避障控制系统哈尔滨工程大学机电工程学院 1 50001 2005[A]
[4] 石为人,周学益。 室内清洁机器人避障路径规划研究。(重庆大学自动化学院,重庆400044) 2007[A]
[5] 谭定忠, 王启明, 孔凡凯。主动移动清洁机器人运动学性能研究 (哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001 2004[A]
[6]时尚预言。自动装置早就“懒汉时代”。 2001