自动化专业
课程综述

课题名称: 自动控制原理
学生班级: 自动化(1)班
学生学号: 0803031012
20##年 12月 28日
摘要
频域(频率域)——自变量是频率,即横轴是频率,纵轴是该频率信号的幅度,也就是通常说的频域图。频谱图描述了信号的频率结构及频率与该频率信号幅度的关系。频域分析具有明显的优点:无需求解微分方程,图解(频率特性图)法,间接揭示系统性能并指明改进性能的方向和易于实验分析.可推广应用于某些非线性系统(如含有延迟环节的系统)以及可方便设计出能有效抑制噪声的系统
关键词:频域 ;反馈放大器;传递函数
1频域理论
频域(频率域)——自变量是频率,即横轴是频率,纵轴是该频率信号的幅度,也就是通常说的频域图。频谱图描述了信号的频率结构及频率与该频率信号幅度的关系。
对信号进行时域分析时,有时一些信号的时域参数相同,但并不能说明信号就完全相同。因为信号不仅随时间变化,还与频率、相位等信息有关,这就需要进一步分析信号的频率结构,并在频率域中对信号进行描述。动态信号从时间域变换到频率域主要通过傅立叶级数和傅立叶变换实现。周期信号靠傅立叶级数,非周期信号靠傅立叶变换。
2频域理论知识
2.1 Bode图
所有的线性过程对象都表现出类似的特性。这些过程对象均将正弦波的输入转换为同频率的正弦波的输出,不同的是,输出与输入的振幅和相位有所改变。振幅和相位的变化量的大小取决于过程对象的相位滞后与增益大小。增益可以定义为“经由过程对象放大后,输出正弦波振幅与输入正弦波振幅之间的比例系数”,而相位滞后可以定义为“输出正弦波与输入正弦波相比较,输出信号滞后的度数”。
与稳态增益K值不同的是,“过程对象的增益和相位滞后”将依据于输入正弦波信号的频率而改变。在上例中,弹簧-重物对象不会大幅度的改变低频正弦波输入信号的振幅。这就是说,该对象仅有一个低频增益系数。当信号频率靠近过程对象的固有频率时,由于其输出信号的振幅要大于输入信号的振幅,因此,其增益系数要大于上述低频下的系数。而当上例中的玩具被快速摇动时,由于重物几乎无法起振,因此该过程对象的高频增益可以认为是零。
过程对象的相位滞后是一个例外的因素。由于当手柄移动得非常慢时,重物与手柄同步振荡,所以,在以上的例子中,相位滞后从接近于零的低频段输入信号就开始了。在高频输入信号时,相位滞后为“-180度”,也就是重物与手柄以相反的方向运动(因此,我们常常用‘滞后180度’来描述这类两者反向运动的状况)。
Bode图谱表现出弹簧-重物对象在0.01-100弧度/秒的频率范围内,系统增益与相位滞后的完整频谱图。这是Bode图谱的一个例子,该图谱是由贝尔实验室的Hendrick Bode于1940s年代发明的一种图形化的分析工具。利用该工具可以判断出,当以某一特定频率的正弦波输入信号来驱动过程对象时,其对应的输出信号的振动幅度和相位。欲获取输出信号的振幅,仅仅需要将输入信号的振幅乘以“Bode图中该频率对应的增益系数”。欲获取输出信号的相位,仅仅需要将输入信号的相位加上“Bode图中该频率对应的相位滞后值”。
2.2傅立叶定理
在过程对象的Bode图中表现出来的增益系数和相位滞后值,反映了系统的非常确定的特征,对于一个有丰富经验的控制工程师而言,该图谱将其需要知道的、有关过程对象的一切特性都准确无误的告诉了他。由此,控制工程师运用此工具,不仅可以预测“系统未来对于正弦波的控制作用所产生的反应。详见以下:
1) 利用傅立叶变换这一数学方法,把提供给过程对象的控制作用,从理论上分解为不同的正弦波的信号组成或的系统响应”,而且能够知道“系统对任何控制作用所产生的系统响应”。
傅立叶定理使得以上的分析成为可能,该定理表明任何连续测量的时序或信号,都可以表示为不同频率的正弦波信号的无限叠加。数学家傅立叶在1822年证明了这个著名的定理,并创造了为大家熟知的、被称之为傅立叶变换的算法,该算法利用直接测量到的原始信号,以累加方式来计算不同正弦波信号的频率、振幅和相位。
从理论上说,傅立叶变换和Bode图可以结合在一起使用,用以预测当线性过程对象受到控制作用的时序影响时产生者频谱。
2) 利用Bode图可以判断出,每种正弦波信号在经由过程对象时发生了那些变化。换言之,在该图上可以找到正弦波在每种频率下的振幅和相位的改变。
3) 反之,利用反傅立叶变换这一方法,又可以将每个单独改变的正弦波信号转换成一个信号。
3频域的发展史
3.1频域方法的建立
在控制系统稳定性的代数理论建立之后,1928年-1945年以美国AT&T公司Bell实验室(Bell Labs)的科学家们为核心,又建立了控制系统分析与设计的频域方法。
3.2负反馈放大器的由来
1928年8月2日,Harold Black(1898-1983),在前往Manhattan西街(West Street)的上班途中,在Hudson河的渡船Lackawanna Ferry上灵光一闪,发明了在当今控制理论中占核心地位的负反馈放大器。由于手头没有合适的纸张,他将其发明记在了一份纽约时报(The New York Times)上,这份早报已成为一件珍贵的文物诊藏在AT&T的档案馆中。
当时的Black年仅29岁,从Worcester Polytechnic Institute获得电子工程学士毕业刚六年。是西部电子公司工程部(这个部后来成为1925年成立的Bell Labs的核心)的工程师,正在从事电子管放大器的失真和不稳定问题的研究。Black首先提出了基于误差补偿的前馈放大器,在此基础上最终提出了负反馈放大器并对其进行了数学分析。同年Black就其发明向专利局提出了长达52页126项的专利申请,但只到九年之后,当Black和他在AT&T的同事们开发出实用的负反馈放大器和负反馈理论之后,Black才得到这项专利。
反馈放大器的振荡问题给其实用化带来了难以克服的麻烦。为此Nicest (1889-1976)和其他一些AT&T的通讯工程师介入了这一工作。Nyquist1917年在耶鲁大学(Yale)获物理学博士学位,有着极高的理论造诣。1932年Nicest发表了包含著名的“乃奎斯特判据”(criterion)的论文,并在1934年加入了Bell Labs。Black关于的负反馈放大器的论文发表在1934年,参考了Nicest的论文和他的稳定性判据。
3.3频域方法的来源
这一时期,Bell实验室的另一位理论专家, Bode(1905-1982)也和一些数学家开始对负反馈放大器的设计问题进行研究。Bode是一位应用数学家,1926年在俄荷俄州立大学(Ohio State)获硕士;1935年在哥伦比亚大学获物理学博士学位。1940年,Bode引入了半对数坐标系,使频率特性的绘制工作更加适用于工程设计。
3.4频域的分析方法的发展
1942年,H Harris引入了传递函数的概念。用方框图、环节、输入和输出等信息传输的概念来描述系统的性能和关系。这样就把原来由研究反馈放大器稳定性而建立起来的频率法,更加抽象化了,因而也更有普遍意义,可以把对具体物理系统,如力学、电学、等的描述,统一用传递函数、频率响应等抽象的概念来研究[22]。1925年英国电器工程师O.亥维赛把拉普拉斯变换应用到求解电网络的问题上,提出了运算微积。不久拉普拉斯变换就被应用到分析自动调节系统问题上,并取得了显著成效。传递函数就是在拉普拉斯变换的基础上引入的。
至1945年,控制系统设计的频域方法,“波德图”(Bode plots)方法,已基本建立了。
在这同一时期,苏联科学家也在控制系统稳定性的频域分析方面取得了进展。1938年和1939年,全苏电工研究所的米哈依洛夫以柯西幅角原理为基础,发表论文给出了闭环控制系统稳定性的频域判别法。米哈依洛夫还提出了把自动调整系统环节按动态特性加以典型化来进行结构分析的问题。
米哈依洛夫有关稳定性频域判据的论文虽然正式发表较晚。但他的研究成果在1936年由苏联列宁共产主义青年团中央召开的青年学者科学家工作成果竞赛会上曾荣膺奖金。 米哈依洛夫的方法现被称为“米哈依洛夫稳定判据”。有些学者又将“乃奎斯特判据”称为“乃奎斯特-米哈依洛夫判据”客观地讲,在频域稳定性判别研究中,乃奎斯特不仅在时间上领先,其工作也更完备。现在我们所使用的也主要是乃奎斯特的开环稳定判据。
总结
频域分析具有明显的优点:无需求解微分方程,图解(频率特性图)法,间接揭示系统性能并指明改进性能的方向和易于实验分析.可推广应用于某些非线性系统(如含有延迟环节的系统)以及可方便设计出能有效抑制噪声的系统。频域分析方法研究已经经历了非常漫长的时间几十年的发展,现在的理论已经比较成熟,而且结合计算机的技术,利用软件,将更加准确的进行频域分析,但是,现在的频域理论仍然还有着许多有待研究的地方,对于新领域的探索仍然不足。随着科学技术的发展,频域理论一定会越来越成熟的!
参考文献
波波夫.自动调节(基本概念).陈以一,王朝馥译.北京:国防出版社,1962
项国波.ITAE最佳控制.北京:机械工业出版社,1986
索洛多夫尼柯夫主编.自动调整原理.王重托译.北京:电力工业出版社,1957
刘豹.自动控制原理.上海:中国科学图书仪器公司.1954
《中国大百科全书.自动控制与系统工程》.北京:中国大百科全书出版社,1991
第二篇:电力拖动自动控制系统实习报告张嘉勋

课程设计(实习)报告
课题名称:龙门刨床工作台调速系统设计
学 院: 电气信息工程学院
专 业: 电气工程及其自动化
姓 名: 张嘉勋
班级学号: 电气08-3班 30号
指导教师: 弭洪涛
2011年 12月30日
一、实习目的:
1.通过设计使学生进一步了解双闭环直流调速系统的结构及工作原
理的有关知识。
2.掌握调节器工程设计的计算方法。
3.学会自动控制系统的总体设计方法。
4.了解直流调速系统在实际生产中的应用。
二、实习内容:
1.龙门刨床工作台工作原理
2.系统总体设计
3.双闭环调速系统性能分析
4.调节器设计
5.系统调试
(一)、工作原理介绍
1、龙门刨床实物图:

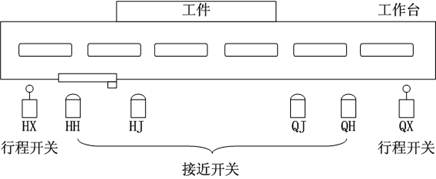
2、工作台控制示意图
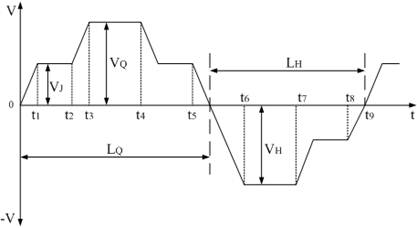
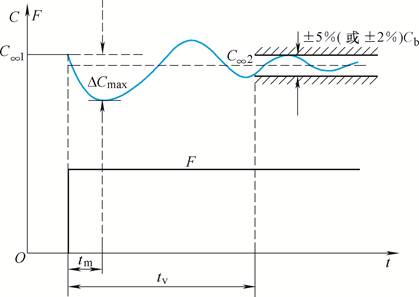
3、龙门刨床工作台速度运行曲线
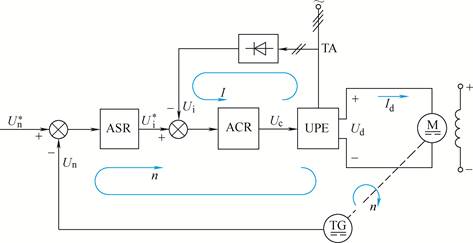
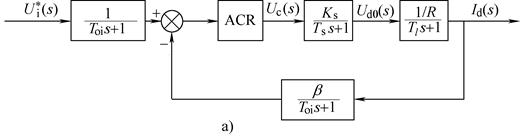
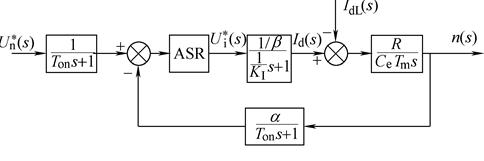
4、转速、电流反馈控制直流调速系统原理图
(二)、转速、电流反馈控制直流调速系统的设计
①跟随性能指标
②抗扰性能指标
③龙门刨床电气系统各部分参数的确定
1)、龙门刨床额定参数如下:
 =60Kw,
=60Kw,  =220V,
=220V,  =305A,
=305A,  =1000r/min,主回路总电阻R=0.18Ω,
=1000r/min,主回路总电阻R=0.18Ω,  =0.2V·min/r,电流过载倍数λ=2,
=0.2V·min/r,电流过载倍数λ=2,  =97.5N·
=97.5N· ,
, =
= S=0.0001S
S=0.0001S
2)、转速反馈系数:
α= =0.012V·min/r
=0.012V·min/r
3)、电流反馈系数:
β= =0.01967V/A
=0.01967V/A
4)、电枢回路电磁时间常数
 =
=
其中L没有给出,可以认为设定,使=0.05S
5)、 机电时间常数:
 =
=
又因为 = 9.55
= 9.55
故 =0.68S
三相桥式电路每个波头的时间是3.3ms,为了基本滤平波头,应有(1~2) =3.33ms,因此,取=0.002S
=3.33ms,因此,取=0.002S
(三)、调节器的工程设计方法
1)、电流调节器的设计
①电流环的动态结构图
②典型系统的选择:采用 I 型系统
 电流调节器选择:PI型的电流调节器
电流调节器选择:PI型的电流调节器
③电流调节器参数计算:
最小时间常数 = +=0.0021S;
= +=0.0021S;
电流调节器超前时间常数 τi==0.05S
电流开环增益:要求S≦5%时,应取 =0.5,因此
=0.5,因此
=0.5 /=238.1
于是ACR的比例系数为
 =(
=( R)/(
R)/( β)=(238.1×0.05×0.18) / (40×0.0197)=2.719
β)=(238.1×0.05×0.18) / (40×0.0197)=2.719
④模拟式电流调节器电路设计

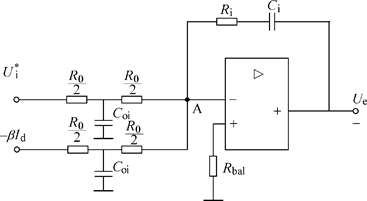
可按所用运算放大器来酌情选择,在这里选择为40kΩ,其他电阻和电容的估算值如下:
?  =
=  = 2.719×40kΩ= 108.76 kΩ?? 取 110kΩ
= 2.719×40kΩ= 108.76 kΩ?? 取 110kΩ
 = / =0.05 / (110×
= / =0.05 / (110× )=0.45×
)=0.45× F 取0.45uF
F 取0.45uF
 =4
=4 / =4×0.002 / (40×) = 0.2×F 取0.2uF
/ =4×0.002 / (40×) = 0.2×F 取0.2uF
按照上述参数,电流环可以达到的动态跟随性能指标为
S = 4.3% ≤ 5%
满足设计要求。
2)、转速调节器的设计
①转速环的动态结构图
典型系统的选择:按典型Ⅱ型系统设计
ASR采用PI调节器

②转速调节器参数的计算:
⑴转速环时间常数的确定:
电流环等效时间常数
1/=2=2×0.0021S=0.0042S
转速滤波时间常数 根据测速发电机纹波的情况,取 =0.01S
=0.01S
转速环最小时间常数 =1/+=0.0142S
=1/+=0.0142S
按照跟随和抗扰性能都较好的原则,取 h=5,则 ASR 的超前时间常数为
 =h×=5 ×0.0142S=0.071S
=h×=5 ×0.0142S=0.071S
则转速环开环增益为:
 =
= =
=
 =595.1
=595.1
于是可求得ASR的比例系数:
 =(
=( β)/(2αhR
β)/(2αhR )=(6×0.2×0.68×0.01967) / (2×0.012×5×0.18×0.0142)=52.3
)=(6×0.2×0.68×0.01967) / (2×0.012×5×0.18×0.0142)=52.3
③模拟式转速调节器电路:
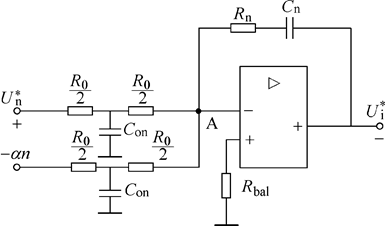
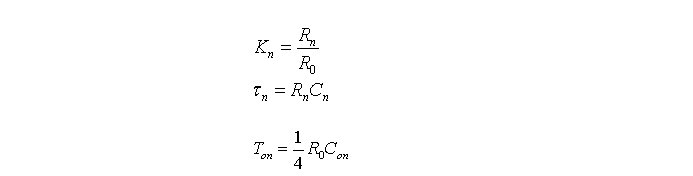
可按所用运算放大器来酌情选择,在这里选择为40kΩ,其他电阻和电容的估算值如下: ==52.3×40 kΩ=2096 kΩ 取2100 kΩ
==52.3×40 kΩ=2096 kΩ 取2100 kΩ
 = / =0.071/(2100×
= / =0.071/(2100× )F=0.034uF
)F=0.034uF
 =4
=4 /=4×0.01/(40×)F=1uF
/=4×0.01/(40×)F=1uF
(四)、系统调试
系统调试步骤是 先内环,后外环,即先调试电流环,然后调试转速环。
⑴ 电流环调试
1) 直流电动机不加励磁,将给定端Ug与电流调节器的输入端“3”端相接,电源控制屏的电流反馈端If与电流调节器的输入端“1”端相接,并顺时针调整电流反馈电位器 RP1 使电阻值最大,即电流反馈最强,电流调节器的输出端“7”端与 Uct 相接,使系统构成 PI 调节 器 的单闭环系统。
2) 将正负给定开关S1拨向负给定位置,开关S2拨向给定位置,调节给定电位器RP2使Ug=0V,按电源控制屏的“闭合”按钮,接通主电路电源﹙绿色指示灯亮﹚,调节给定电位器RP2逐渐增加给定电压Ug,使之等于转速调节器(ASR) 输出限幅值(– 5V),然后调整电流反馈电位器RP1,观察主电路电流使之等于1.1IN。
3) 突加给定,用示波器观察电流反馈的波形,通过改变电流调节器的 PI 参数使电流反馈波形达到较好的波形。
⑵ 转速环调试
1) 在实验装置断电情况下,按双闭环直流调速系统实验线路图及接线图进行接线,使系统构成双闭环调速系统。
2) 将正负给定开关 S1 拨向正给定位置,开关 S2 拨向给定位置,调节给定电位器 RP1使U g=0V,顺时针调节转速反馈电位器 RP 使电阻值最大,即转速反馈最强。
3) 电动机加额定励磁电压, 按下电源控制屏的“闭合”按钮,接通 主电路电源﹙绿色指示灯亮﹚,调节给定电位器RP1逐渐增加给定电压 Ug,若稍加给定,电机转速很高并且调节给定电压Ug也不可控,则表明转速反馈极性有误,应立即 调节给定电位器 RP1使Ug=0V,然后切断电源,将转速反馈两根线相互调换后,再接通电源,然后逐渐增加给定电压 Ug,观察电机转速是否可控,正常之后,调节给定电压使Ug=5V,再调节转速反馈电位器 RP,使转速达到额定转速 1000rpm 。
4) 突加给定,用示波器观察转速反馈的波形,通过改变转速调节器的PI参数使转速反馈波形达到较好的波形。
⑶双闭环系统调试
双闭环直流调速系统总体 调试,通过改变 转速 调节器、电流 调节器的 PI 参数使系统静态、动态性能较好。
三、实习心得
为期一周的直流调速实习即将结束了,通过这一周的自己学习以及老师和同学的帮助,使我学到了更多实用的知识,让我对实验设备及实验原理有了更进一步的认识。通过本次的实习,我还发现自己以前学习中所出现的一些薄弱环节,并为今后的学习指明了方向,同时也会为将来的工作打下一个良好的基础。这次的实习为我们提供了一个很好的锻炼机会,使我们及早了解一些相关知识以便以后运用到以后的业务中去。通过这次的实习,我知道只有通过刻苦的学习,加强对业务知识的熟练掌握程度,在现实的工作中才会得心应手,应对自如。
总体来说,经过这次实习,我还从中学到了很多课本上所没有提及的知识,还有就是在就业心态上我也有很大的改变。对此我思考过,学习经验自然是一个因素,然而更重要的是心态的转变没有做到位。因为我明白了何谓工作。在接下来的日子里,我会朝这个方向努力,我相信自己能够把那些不该再存在的“特点”抹掉。感谢老师们在这段时间里对我的指导和教诲,我从中受益非浅。我会把这此实习作为我人生的起点,在以后的工作学习中不断要求自己,完善自己,让自己做的更好。