机械原理课程设计
说明书
设计题目: 牛头刨床设计
学 校: 广西科技大学
院(系): 汽车与交通学院
班 级: 车辆131班
姓 名: M J
学 号:
指导教师:
时 间:
1、机械原理课程设计的目的和任务
1、课程设计的目的:机械原理课程设计是高等工业学校机械类学生第一次全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要教学环节。起目的在于进一步加深学生所学的理论知识,培养学生的独立解决有关课程实际问题的能力,使学生对于机械运动学和动力学的分析和设计有一个比较完整的概念,具备计算,和使用科技资料的能力。在次基础上,初步掌握电算程序的编制,并能使用电子计算机来解决工程技术问题。
2、课程设计的任务:机械原理课程设计的任务是对机器的主题机构进行运动分析。动态静力分析,并根据给定的机器的工作要求,在次基础上设计;或对各个机构进行运动设计。要求根据设计任务,绘制必要的图纸,编制计算程序和编写说明书等。
2、机械原理课程设计的方法
机械原理课程设计的方法大致可分为图解法和解析法两种。图解法几何概念比较清晰、直观;解析法精度较高。
3、机械原理课程设计的基本要求
1. 作机构的运动简图,再作机构两个位置的速度,加速度图,列矢量运动方程;
2.作机构两位置之一的动态静力分析,列力矢量方程,再作力的矢量图;
3.用描点法作机构的位移,速度,加速度与时间的曲线。
4、设计数据
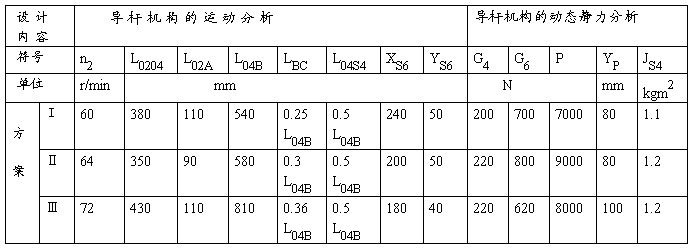
表1-1
5、机构简介
牛头刨床是一种用于平面切削加工的机床,由导杆机构2-3-4-5-6(有急回作用)带动刨头6和刨刀作往复运动。刨头自左向右称工作行程;刨头自右向左称空回行程,回空行程无切削阻力。
6、 选择设计方案
(1)机构运动简图
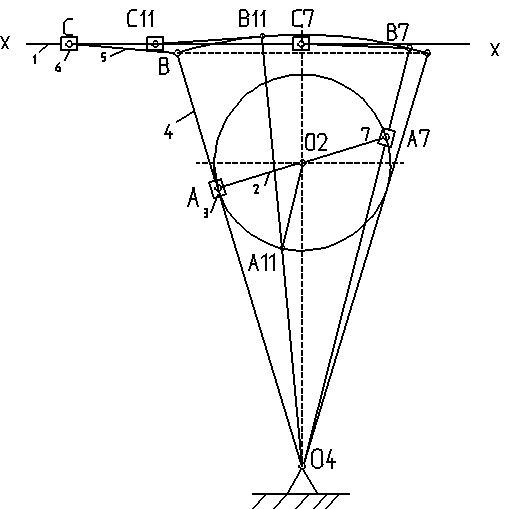
图1-1
(2)选择表1-1中方案Ⅰ
7、 机构运动分析
a、曲柄位置“7”速度分析。
因构件2和3在A处的转动副相连,故υA3=υA2,其大小等于ω2lO2A,方向垂直于O2 A线,指向与ω2一致。
ω2=2πn2/60 =6.28319rad/s
υA3=υA2=ω2·lO2A=6.28319×0.11=0.6911509m/s(⊥O2A)
取构件3和4的重合点A进行速度分析。列速度矢量方程,得
υA4 = υA3+ υA4A3
大小 ? √ ?
方向 ⊥O4A ⊥O2A ∥O4B
取速度极点P,速度比例尺μ1=0.01 (m/s)/mm ,作速度多边形如图1-2
则由图1-2知,
υA4= ·μ1= 35.7701×0.01=0.357701m/s
·μ1= 35.7701×0.01=0.357701m/s
υA4A3= ·μ1=59.1387×0.01=0.591387m/s
·μ1=59.1387×0.01=0.591387m/s
由速度影像定理求得:
υB5=υB4
=υA4·LO4B/LO4A=0.357701×0.540/0.4250888=0.45439m/s
又 ω4=υA4/ lO4A=0.841474rad/s
取5构件作为研究对象,列速度矢量方程,得:
υC5=υB5+υC5B5
大小 ? √ ?
方向 ∥XX ⊥O4B ⊥BC
取速度极点P,速度比例尺μ1=0.01(m/s)/mm,
则由图1-2知, υC5=  ·μ1=44.4554×0.01=0.444554m/s
·μ1=44.4554×0.01=0.444554m/s
υC5B5= ·μ1=11.2405×.0.01=0.11245m/s
·μ1=11.2405×.0.01=0.11245m/s
ωCB=υC5B5/lCB= 0.112405/0.135=0.83263rad/s
图1-2
b.加速度分析:
取曲柄位置“ 7 ”进行加速度分析。因构件2和3在A点处的转动副相连,
故 =
= ,其大小等于ω22lO2A,方向由A指向O2。
,其大小等于ω22lO2A,方向由A指向O2。
ω2=6.28319rad/s,
==ω22·LO2A=6.283192×0.11=4.34263m/s2
 =ω42·LO4A=0.8414742×0.4250888=0.30099m/s2
=ω42·LO4A=0.8414742×0.4250888=0.30099m/s2
取3、4构件重合点A为研究对象,列加速度矢量方程得:
aA4 = + aA4τ= aA3n + aA4A3K + aA4A3r
大小: ? ω42·LO4A ? ω22·LO2A √ ?
方向: ? B→A ⊥O4B A→O2 ⊥O4B ∥O4B
取速度极点P',速度比例尺μ2=0.1 (m/s)/mm ,作速度多边形如图1-3

图1-3
由图1-3得:
aA4A3K=2ω4·υA4A3=2×0.841474×0.591387=0.99527m/s
aA4τ== A4'A4·μ2=27.2051×0.1=2.72051m/s2
α4= a A4t/lO4A = 2.72051/0.425088=6.39986 m/s2
a A4 = P'A4·μ2 = 27.3712×0.1=2.73712 m/s2
用加速度影象法求得
aB5 = aB4 =aA4·LO4B/LO4A=2.73712×0.540/0.4250888=3.47702m/s2
又 aBCn=ω52·LBC =0.832632×0.135=0.093518m/s2
取5构件为研究对象,列加速度矢量方程,得
ac5= aB5+ ac5B5n+ a c5B5τ
大小 ? √ ω52·LBC ?
方向 ∥XX √ C→B ⊥BC
取加速度极点为P',加速度比例尺μ2=0.1(m/s2)/mm,
作加速度多边形如图1-4所示.
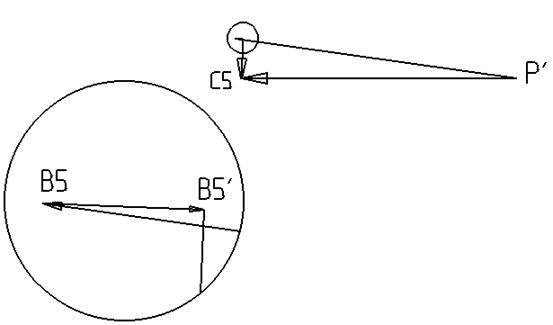
图1-4
则由图1-4知, aC5B5t= B5'C5·μ2 =4.8198×0.1 =0.48198m/s2
aC5 = P'C5·μ2 =33.6884×0.1m/s2 =3.36884m/s2
c、曲柄位置“11”速度分析。
因构件2和3在A处的转动副相连,故υA3=υA2,其大小等于ω2lO2A,方向垂直于O2 A线,指向与ω2一致。
ω2=2πn2/60 =6.28319rad/s
υA3=υA2=ω2·lO2A=6.28319×0.11=0.6911509m/s(⊥O2A)
取构件3和4的重合点A进行速度分析。列速度矢量方程,得
υA4 = υA3+ υA4A3
大小 ? √ ?
方向 ⊥O4A ⊥O2A ∥O4B
取速度极点P,速度比例尺μ3=0.01 (m/s)/mm ,作速度多边形如图1-5
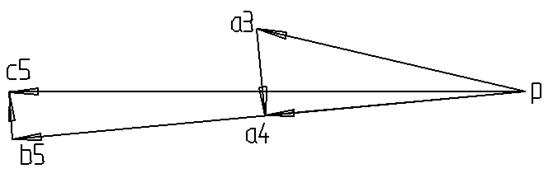
图1-5
则由图1-5知, υA4=·μ3=65.59×0.01=0.6559m/s
υA4A3=·μ3=21.79×0.01=0.2179m/s
由速度影像定理求得:
υB5=υB4
=υA4·LO4B/LO4A=0.6559×0.540/0.27404=1.29246m/s
又 ω4=υA4/ lO4A=0.6559/0.27404=2.39945rad/s
取5构件作为研究对象,列速度矢量方程,得
υC5=υB5+υC5B5
大小 ? √ ?
方向 ∥XX ⊥O4B ⊥BC
取速度极点P,速度比例尺μ3=0.01(m/s)/mm,则由图1-5知:
υC5= ·μ3=129.52×0.01=1.2952m/s
υC5B5=·μ3=11.87×.0.01=0.1187m/s
ωCB=υC5B5/lCB=0.1187/0.135=0.87926rad/s
d、加速度分析:
取曲柄位置“ 11”进行加速度分析。因构件2和3在A点处的转动副相连,
故=,其大小等于ω22lO2A,方向由A指向O2。
ω2=6.28319rad/s,
==ω22·LO2A=6.283192×0.11=4.34263m/s2
=ω42·LO4A=2.399452×0.27404=1.57775m/s2
取3、4构件重合点A为研究对象,列加速度矢量方程得:
aA4 = + aA4τ= aA3n + aA4A3K + aA4A3r
大小: ? ω42·LO4A ? √ 2ω4·υA4A3 ?
方向: ? B→A ⊥O4B A→O2 ⊥O4B ∥O4B
取速度极点p',速度比例尺μ4=0.1 (m/s)/mm ,作速度多边形如图1-6
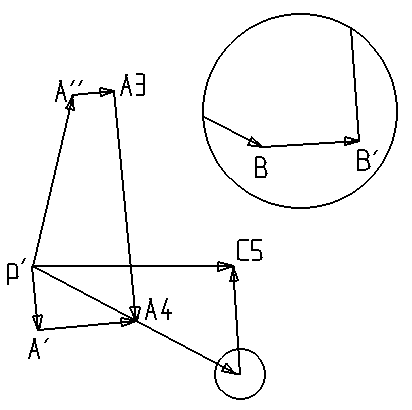
图1-6
由图1-6得:
aA4A3K=2ω4·υA4A3=2×2.39945×0.2179=1.04568m/s2
aA4τ== A'A4 ·μ4=24.18×0.1=2.418m/s2
α4= a A4t/lO4A = 2.418/0.27404=8.82353 m/s2
a A4 = p'A4·μ4= 28.87×0.1=2.887 m/s2
用加速度影象法求得
aB5 = aB4 =aA4·LO4B/LO4A=2.887×0.540/0.27404=5.6889m/s2
又 aBCn=ω52·LBC =0.879262×0.135=0.10437m∕s2
取5构件为研究对象,列加速度矢量方程,得
ac5= aB5+ ac5B5n+ ac5B5τ
大小 ? √ ω52·LBC ?
方向 ∥XX √ C→B ⊥BC
取加速度极点为P',加速度比例尺μ4=0.1(m/s2)/mm
则由图1-6知, aB5'C5t= B'C5· μ4=26.5894×0.1 =2.65894m/s2
aC5 =P'C5· μ4=49.4984×0.1 =4.94984m/s2
9、机构运态静力分析
导杆机构的动态静力分析
已知各构件的重量G(曲柄2、滑块3和连杆5的重量都可忽略不计),导杆4绕重心的转动惯量Js4及切削力FP的变化规律。
要求求各运动副中反作用力及曲柄上所需要的平衡力矩。
取“7”点为研究对象,分离5、6构件进行运动静力分析,作阻力体 如图1─7所示。

图1-7
已知G6=700N,又ac6=ac5=3.36884m/s2,那么我们可以计算:
Fi6=G6/g×ac6 =700/9.8×3.36884=240.631428N
又ΣF=FP+G6+Fi6+FR45+FR16=0,作为多边行如图1-8所示,μ5=50N/mm
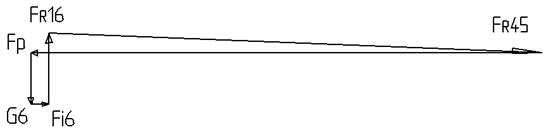
图1-8
由图1-8力多边形可得:
FR45=|FR45|·μ5=135.2964×50N=6764.82N
FR16=|FR16|·μ5=19.4396×50N=971.98N
分离3,4构件进行运动静力分析,如图1-9所示,
已知: FR54=FR45=6764.82N,G4=200N
由此可得: Fi4=G4/g×aS4 =35.47985N
MS4=JS4·αS4=1.1×6.399986=7.039984N·m
7
在图1-9中,对O4点取矩得:
ΣMO4=FR54·hBO4-Ms4-FI4·hs4O4-G4·HS4O4-FR23·lO4A=0

图1-9
代入数据, 得FR23=8334.86536N
又 ΣF=FR54+FR23+Fi4+G4+FR14=0,作力的多边形如图1-10所示, µ6=100N/mm。
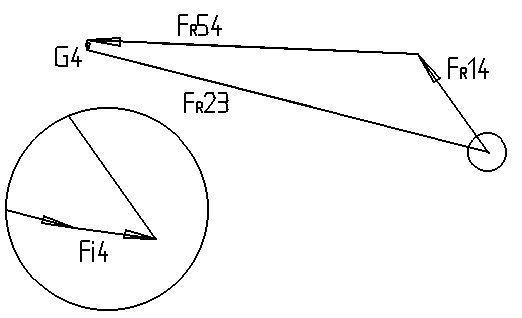
图1-10
由图1-10可得:
FR12=FR32=FR23=|FR23|·µ6=8334.86536N
FR14=|FR14|·µ6=24.1936×100=2419.36N
对曲柄2进行运动静力分析,作组力体图如图1-11所示。 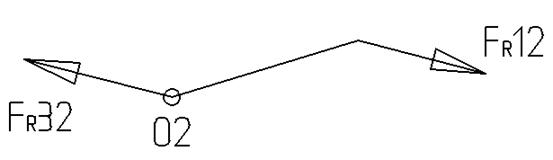
图1-11
在图1-11中,对O2点取距得:
Mo2=FR32h=8334.86536×0.0569285=474.491382N·m
10、虚位移原理
所有外力的功率和为0,Np+Ni6+NG4+Ni4+NM=0
Np=|P||Vc|cos180°=-7000×0.444554=-3111.878
Ni6=|Fi6||Vc|cos0°
=240.631428×0.444554=106.97366
NG4=0.5|G4||VB|cos75.65913714°
=0.5×200×0.45439×0.2476900=11.254788
Ni4=|Fi4||Vi4|cos6.31640226°
=35.47985×0.357701×0.993929=12.614136
可求得NM=2981.035414
NM=Mbω2
把数据代入上式,得平衡力矩Mb=474.446167N·m
14、总结
通过几天的奋斗,我终于通过了老师的答辩,事实证明我这些天的努力没有白费。在老师亲切地指导下,在同学们的密切配合下,当然也有自己的努力和辛酸,这份课程设计终于完成了。相信我,这份文档绝对没错。
在这期间,我有很多的体验,同时也有我也找到许多的不足,仅就计算机辅助绘图而言,操作的就远远不够熟练,专业知识也不能熟练应用。但是通过这次实践设计,我觉得我有了很大的提高。
其次,通过这次设计我学会了查找一些相关的工具书,并初步掌握了一些设计数据的计算方法。
再次,自己的计算机绘图水平也有了一定的提高,并对所学知识有了进一步的理解。
当然,自己的第一次课程设计,其中肯定有太多的不足,希望在今后的设计中,能够得到改正,使自己日益臻于成熟,专业知识日益深厚。
我在这次设计中感到了合作的力量,增强了自己的团队精神。这将使我受益终生。通过不断锻炼,自己才能迎接更大的挑战和机遇,我相信我自己一定能够在锻炼中成长。
第二篇:牛头刨床课程设计报告
课 程 设 计 报 告
姓名:
学号:
指导教师:

一、背景概述
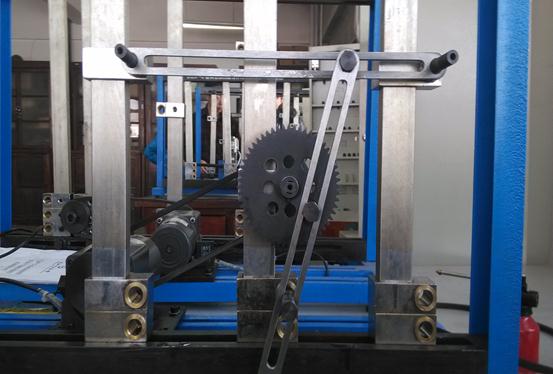
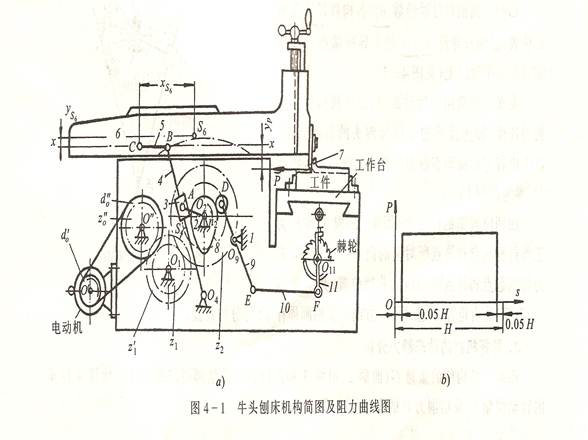
牛头刨床是一种用于平面切削加工的机床,如图4-1。电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量,刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。为此刨床采用有急回作用的导杆机构。刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。刨头在工作行程中,受到很大的切削阻力(在切削的前后各有一段约5H的空刀距离,见图4-1,b),而空回行程中则没有切削阻力。因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减小电动机容量。
 牛头刨床是一种用于平面切削加工的机床。电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。刨头右行时,刨刀进行切削,称工作切削。此时要求速度较低且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。为此刨床采用急回作用得导杆机构。刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮机构带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需装飞轮来减小株洲的速度波动,以减少切削质量和电动机容量。
牛头刨床是一种用于平面切削加工的机床。电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。刨头右行时,刨刀进行切削,称工作切削。此时要求速度较低且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。为此刨床采用急回作用得导杆机构。刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮机构带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需装飞轮来减小株洲的速度波动,以减少切削质量和电动机容量。
二、设计方案
选用曲柄滑块机构。
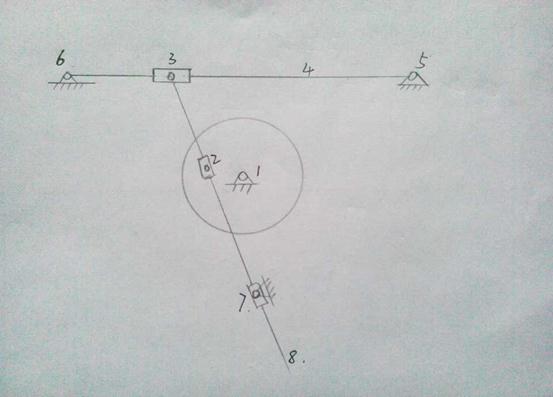
(1)机构简图如下图

(2)机械功能分析
根据机构图可知,整个机构的运转是由原动件1带动的。杆通过滑块2带动滑块3的运动,从而实现刨刀的往复运动。
(3)工作性能分析
该机构中原动件1对滑块2的压力角一直在改变。但是原动件1的长度较小,滑块3的半径较大,即原动件1的变化速度对于滑块3的影响不是很大,同时机构是在转速不大的情况下运转的,也就是说,在滑块2作用下的滑块3的速度在切削过程中变化不大,趋于匀速运行。
原动件1在滑块2上的速度始终不变,但是随着原动件1的运转,在一个周期里,滑块3的半径长度由小到大,再变小。而半径的长度是滑块3的回转半径,也就是说,在机构的运行过程中,推程的速度趋于稳定,在刨头回程时,由于扇形齿轮受到齿条的反作用力减小。`还有滑块3的回转半径减小,使滑块3的回程速度远大于推程时的速度。即可以达到刨床在切削时速度较低,但是在回程时有速度较高的急回运动的要求。在刨头往返运动的过程中,避免加减速度的突变的产生。
(4)机构的传递性能动力性能分析
该机构中所有的运动副都是低副,齿轮接触的运动副对于载荷的承受能力较强,所以,该机构对于载荷的承受能力较强,适于加工一定硬度的工件。同时。滑块3是比较大的工件,强度比较高,不需要担心因为载荷的过大而出现机构的断裂。
在整个机构的运转过程中,原动件1是一个曲柄,滑块3只是在一定的范围内活动,对于杆的活动影响不大,机构的是设计上不存在运转的死角,机构可以正常的往复运行。该机构的主传动机构采用导杆机构。滑块3固结于刨头的下方。滑块3的重量较小,运转时产生的惯量也比较小,不会对机构产生一定的冲击,从而不会使机构产生震动。
(5)机构的合理性与经济性能分析
该机构的设计简单,尺寸可以根据机器的需要而进行选择,不宜过高或过低。同时,齿轮的重量有助于保持整个机构的平衡。使其重心稳定。由于该机构的设计较为简单。所以维修方便。,除了滑块的安装需要很高的精确度外没有什么需要特别设计的工件,具有较好的合理性。
三、设计计算
(1)滑块位置“2”速度分析,加速度分析
取滑块位置“2”进行速度分析。因构件2和8在A处的转动副相连,故VA2=VA3,其大小等于ω2lO2A,方向垂直于O2 A线,指向与ω2一致。
ω2=2πn2/60 rad/s=6.699rad/s
υA3=υA2=ω2·lO2A=6.699×0.09m/s=0.6m/s(⊥O2A)
取构件2和8的重合点A进行速度分析。列速度矢量方程,得
υA4=υA3+υA4A3
大小 ? √ ?
方向 ⊥O4A ⊥O2A ∥O4B
取速度极点P,速度比例尺µv=0.01(m/s)/mm ,作速度多边形
则, υA4= pa4/μv =44.9m/s
υA4A3= a3a4/μv =37.5m/s
由速度影像定理求得,
υB5=υB4=υA4·O4B/ O4A=0.61m/s
又 ω4=υA4/ lO4A=1.08rad/s
取4构件作为研究对象,列速度矢量方程,得
υC=υB+υCB
大小 ? √ ?
方向 ∥XX ⊥O4B ⊥BC
取速度极点P,速度比例尺μv=0.01(m/s)/mm, 作速度多边行
则由图1-4知, υC=0.61m/s
υCB=0.11m/s ωCB=υCB/lCB=0.63
(2)加速度分析:
取滑块位置“3”进行加速度分析。因构件2和8在A点处的转动副相连,
故 =
= ,其大小等于ω22lO2A,方向由A指向O2。
,其大小等于ω22lO2A,方向由A指向O2。
ω2=6.699rad/s==ω22·LO2A=6.6992×0.09 m/s2=4.04m/s2
取3、4构件重合点A为研究对象,列加速度矢量方程得:
aA4 =  + aA4τ= aA3n + aA4A3K + aA4A3r
+ aA4τ= aA3n + aA4A3K + aA4A3r
大小: ? ω42lO4A ? √ 2ω4υA4A3 ?
方向: ? B→A ⊥O4B A→O2 ⊥O4B ∥O4B
取4构件为研究对象,列加速度矢量方程,得
ac5 = aB5 + ac5B5n + a c5B5τ
大小 ? √ √ ?
方向 ∥X √ C→B ⊥BC
取加速度极点为P',加速度比例尺µa=0.02(m/s2)/mm,
作加速度多边形.
则知, aA4= aA3 =p´a4′·μa=100×0.02m/s=2m/s2,
α4'=  / LO4A=1.48 rad/s2
/ LO4A=1.48 rad/s2
用加速度影象法求得
aB5 = aB4 =2.73×580/340 m/s2 =4.66 m/s2
又 aBCn=b′c′×μa =35.5m∕s2
四、设计创新点
(1)本次设计采用的是摆动导杆机构,当滑块2随着齿轮1做等速的整周旋转运动时,滑块3沿导轨4做来回摆动的速度不同,返回时速度较大,即具有急回特性;
(2)可以很好的实现切削功能;
(3)切削速度近似均匀且变化缓和平稳,刨削质量比较好;
(4)适合于低速轻载的工作情况;
(5)由杆件构成尺寸比较小,重量轻,制造简单,维修方便;
(6)比较适合于量产,经济效益比较好。
五、总结
美丽的花朵必须要通过辛勤的汗水浇灌.有开花才有结果,有付出才有收获.
通过几天日日夜夜的奋斗,在老师亲切地指导下,在同学们的密切配合下,当然也有自己的努力和辛酸,这份课程设计终于完成了,心里无比的高兴,因为这是我们 努力的结晶。
在这几天中,我有很多的体验,同时也有我也找到许多的毛病,仅就计算机辅助绘图而言,操作的就远远不够熟练,专业知识也不能熟练应用。但是通过这次实践设计,我觉得我有了很打的提高。其次,通过这次设计我学会了查找一些相关的工具书,并初步掌握了一些设计数据的计算方法;再次,自己的计算机绘图水平也有了一定的提高,并对所学知识有了进一步的理解。当然,作为自己的第一次设计,其中肯定有太多的不足,希望在今后的设计中,能够得到改正,使自己日益臻于成熟,专业知识日益深厚。
我在这次设计中感到了合作的力量,增强了自己的团队精神。这将使我受益终生。“功到自然成”只有通过不锻炼,自己才能迎接更大的挑战和机遇,我相信我自己一定能够在锻炼成长.
参考文献
1.《机械运动方案设计手册》邹慧君主编. 上海交通大学出版社,2004
2.《 机械设计》吴克坚,于晓红,钱瑞明主编. 北京:高等教育出版社,2003
3.《机械设计》龙振宇主编. 北京:机械工业出版社,2002
4.《机械设计基础(第四版)》杨可桢,程光蕴主编. 北京:高等教育出版社,1999
5.《 机械设计基础(下册)》张莹主编. 北京:机械工业出版社, 1997
6. 《机械设计(机械设计基础Ⅱ)》周立新主编. 重庆:重庆大学出版社, 1996
7.《机械系统设计》朱龙根,黄雨华主编. 北京:机械工业出版社, 1990
8.《机械设计学》黄靖远,龚剑霞主编. 北京:机械工业出版社, 1999
附图:
(1)机构运动简图
(2)机构运动实物照片