多旋翼自主飞行器(C题)
摘要
本设计是四旋翼自主飞行器,采用了R5F100LEA为导航、图像识别及其数据处理的主控芯片,另选用STM32F407VGT6作为陀螺仪、加速度计和超声波的数据采集及其数据处理的辅助控制芯片。系统包括姿态检测模块、图像识别模块、超声波测距模块以及其它基本电路结构和机械结构,其中姿态检测模块采用MPU6050三轴陀螺仪加速度传感器和HMC5883L三轴磁力传感器来实现,图像识别模块利用CCD摄像头检测启停标志、飞行引导线标志和路线标志。系统主要算法有IIR滤波算法、姿态融合算法,核心控制算法是PID算法。基于以上各功能模快,飞行器能够实现课题要求。
关键词:R5F100LEA;STM32F407VGT6;陀螺仪;CCD;PID
一、系统方案
课题要求在限定时间和限定高度内定点起降、寻线飞行、航拍,以及来回搬运铁板的任务,所以本系统使用双MCU来提高性能,为了使飞行器能够精确到达目的地以及其它任务,所以对系统各功能模块进行了如下的方案选择与论证。
1.主驱动器的论证与选择
方案一:选用单个R5F100LEA作为控制核心,节约成本,但要实现所要求功能,会耗尽MCU的资源,使系统不稳定。
方案二:选用一主控芯片R5F100LEA用作航拍、及其数据处理,另选用一辅助控制芯片STM32F403VGT6进行相应传感器数据采集、及其数据处理。
综合上述两种方案,选择方案二,使系统更加稳定
2.姿态检测模块的论证与选择
方案一:用单轴陀螺仪BJXM-PAS,这款传感器为低功耗、低成本模块,只能测量一个方向的角速度,要想实现所有飞行功能`至少三个模块,那样会增加飞行器的载重量给,给飞行器增加负担。
方案二:3轴陀螺仪+三轴加速度传感器模块MPU6050和三轴磁力计模块HMC5883L,这两个传感器能测量三轴的角度,进而得到欧拉角,三维立体空间中很好的定位飞行器的位置与和姿态飞行。
综合以上两种方案,选择方案二。
3.高度检测模块的论证与选择
方案一:气压计模块BMP180,是根据大气压与高度的关系来计算出高度,但是鉴于飞器是在2m以内飞行,而气压计在这么短的高度内误差会非常大,因为气压变化太小。
方案二:超声波测距模块,其作用是发射超声波,接收反射回来的超声波,它能在这一过程输出相应时间的高电平,比较稳定,误差很小。
综合以上两种方案,选择方案二。
4.导航模块的论证与选择
方案一:安装OV7725模块,该模块自带24M有源晶振,方便实用,分辨率120fps高帧速度输出,需要高速度处理器进行处理。
方案二:安装CCD模块,用该模块来识别各个标志并沿着沿线飞行可行,处理起来也简单易行。
鉴于MCU性能,选择方案二。
二、系统理论分析与设计
1.姿态解算
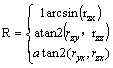
刚体运动时用欧拉角变换测得飞行姿态,按图所示有两个坐标系,一个是地面参考系,一个是机体坐标系。对于任意Q向量,相对于机体坐标系得到向量 和对于地面参考系的向量
和对于地面参考系的向量 ,由旋转矩阵R得到=R,其中旋转矩阵R=
,由旋转矩阵R得到=R,其中旋转矩阵R= 。
。
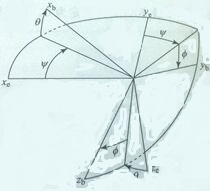
1)机体绕 轴旋转得到偏航角ψ;
轴旋转得到偏航角ψ;
2)机体绕 轴旋转得到俯仰角θ;
轴旋转得到俯仰角θ;
3)机体绕 轴旋转得到俯仰角φ;
轴旋转得到俯仰角φ;
因此欧拉角与方向余弦的关系如下:
2.高度计算
实时读取超声波模块发射到接收的时间T,测距的公式为:H=C×T,C为超声波在空气中的传播速度;T为测量距离传播的时间差(T为发射到接收时间数值的一半),再经过滤波算法就可以用于飞行器定高。
三、电路与程序设计
(一)电路的设计
1.系统组成
本系统由单片机主控模块、姿态检测模块、图像识别模块、超声波模块、电机模块组成。
2.系统整体框图
系统原理框图如图所示:





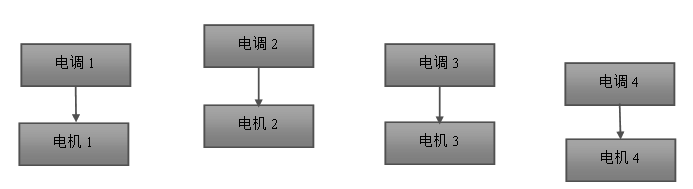
 PWM1 PWM2 PWM3 PWM4
PWM1 PWM2 PWM3 PWM4
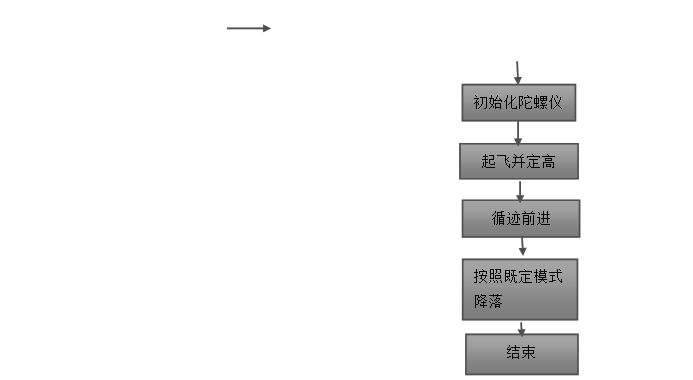
(二)程序的设计
程序流程图如下
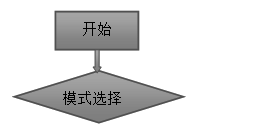



 P=1 P=2
P=1 P=2
 P=0
P=0




四、测试方案与测试结果
1.测试条件
CCD图像采集模块,R5F100LEA,STM32F407VGT6,上位机,示波器,米尺,秒表。
2.测试结果
(1)基本功能
按照题目基础部分要求,做了相应测试,结果记录在下表
表1.A区飞到B区飞行的时间

表2.A区沿CDEF回到A区的时间

对于基本要求(3),自制的电子示高装置能够实现功能。
(2)发挥功能
表3.A区飞到B区飞,B区飞回A区的时间

表4.A区飞到B区飞,B区飞回A区的时间

3.测试结果分析
本设计拥有双MCU单片机模块以及其它功能模块,再加上PID核心算法,能够实现定点起降、寻线飞行,实现指定任务。根据测试结果分析,飞行器比较稳定。
第二篇:四旋翼微型飞行器设计
第17卷第3期2012年6月
哈尔滨理工大学学报
JOURNALOFHARRINUNIVERSITY0FSCIENCEAND。11ECHNOLoGY
V01.17No.3
Jun.2012
四旋翼微型飞行器设计
张广玉,
张洪涛,
李隆球,
王
林
(哈尔滨工业大学机电工程学院,黑龙江哈尔滨150001)
摘要:针对常规无人飞行器尺寸较大,无法适用于室内狭小空间飞行的问题。设计了一种四旋翼微型飞行器.建立了微型飞行器的动力学模型,介绍了组成飞行器的相关硬件.构建了由三轴陀螺仪、三轴加速度计和三轴磁力计组成的姿态测量系统,给出了姿态解算的具体步骤.使用了互补滤波器对陀螺测量误差进行矫正,并给出了互补滤波器融合系数的确定方法.采用基于欧拉角反馈的PID控制器进行姿态控制,无需建立复杂的控制系统模型.该飞行器最大尺寸15cm,重量22g,可垂直起降和悬停,适用于狭小空间的侦察任务.
关键词:四旋翼;微型飞行器;姿态测量;互补滤波器;PID控制器中图分类号:V221
文献标志码:A
文章编号:1007—2683(2012)03~0110—05
DesignofQuad-rotorMicroAlrVehicIeZ黝ⅣGGun,lg一弘,加玢ⅣG胁愕一tno,
(sch00l
0f
Ⅳ助增一giu,删^B三流
MechanicalandElec试c
Engineedng,HarbinInstitllteofTechnolo科,Harbin150001,china)
Abstract:ThesizeoftheconventionalunmannedaerialvehicleislaI翟_efornightinnarrowandsmallindoorenvironrnent.Aquad?mtorMicmAirVehiclei8designed
set
a
to
solvethepmblem.Thedynamicmodeloftllevehicleis
a
up.Thehardwareofthevehicleisdescribed.Theattitudemeasurement8ystemconsistsof
a
triaxial
gyrosc叩e,
Acom—
triaxialaccelemmeterand
triaxialmagnetometer.Theattitudealgorithmmethodisdescribedindetail.
theermrsof舒rromeasurement.Themethodof
a
plementaI_yfiherisusedtoof
correct
dete册ining
on
thefusioncoel矗cient
compIeInentary胁er
to
isgiven。TheattitudeeontrolsyStemis
PIDcontrollerbased
Euleranglesfeedback,
withouttheneed
create
complexmodelofcontmlsystem.Themaximumsizeoft11evehicleis15centimeters,and
can
theweightofwhichis22grams.7IheMicroAirVehi‘!leissuitableforreconnaissancemissionsinna玎owspaces.
Key
peIfo珊venical
takeoff,landingandhovering,which
w坩ds:quad—rotor;Micr0
Air
Vehicle;attitudemeasurement;comp】ementaryfilter;PIDcontmller
基本技术指标包括:飞行器最大尺寸不超过15
O
cm,
引言
air
重量10~100g,有效载荷1一18g,续航时间20—60min,巡航速度30~60km/h,飞行距离1—10km,能
vehicle,MAV)是20世纪
够自主飞行.按照飞行模式的不同,微型飞行器可分为:固定翼微型飞行器、旋翼微型飞行器和扑翼微型飞行器.固定翼微型飞行器飞行距离远,巡航速度
微型飞行器(micro
90年代发展起来的一种新型飞行器.根据美国国防高级研究计划局(DARPA)的定义…,微型飞行器的
收稿日期:2叫1—12—28
基金项目:中国博士后科学基金(20¨0491036)
作者简介:张广玉(1962一),男,教授,博士生导师,E-mil:29yqx@硫.edu.c“;
张洪涛(1984一),男,博士研究生.
万方数据
第3期
张广玉等:四旋翼微型飞行器设计
微型飞行器的动力学模型如2图所示.飞行器载体坐标系B,原点固连于飞行器的重心,以坐标轴茗。,y。和钿表示,分别指向飞行器的前(横滚轴)、右(俯仰轴)和下(偏航轴)方向.选取导航坐标系,v为参考坐标系…J,以坐标轴并。,y,和z。表示,分别指向北、东和当地垂线向下方向.』lf和F分别代表飞行器受到转矩和升力.
快,续航能力强,比较适合野外区域性侦查等工作.其典型代表是美国航空环境公司(Aer0Vimnment)研制的Blackwidow怛1和洛克希德桑德斯公司(LDckheedsanders)研制的MicrostarpJ.旋翼微型飞行器具有一个或多个旋翼,能够垂直起降和悬停,适用于狭小空间(如室内)或复杂近地环境中.典型代表是洛克尼克公司(Lutronix)研制的Kolibri”1和斯坦福大学研制的Mesicopter”J.扑翼微型飞行器是一种模仿昆虫或鸟类的新型飞行器,其主要特点是将举升、悬停和推进功能集成于一体,具有很强的机动性和灵活性.扑翼微型飞行器控制方式比较复杂,目前多数机构都处于研究阶段,离实际使用还有一定的距离.典型代表是加利福尼亚工学院研制的MicroBat旧1和斯坦福研究中心(SRI)研制的Men.tor¨1.国内也有多家高校开展了微型飞行器的研究工作,如清华大学,上海交通大学¨J,哈尔滨理工大学一J,华南理工大学¨驯等.
对于室内狭小空间的侦查任务,需要微型飞行器具有垂直起降能力,稳定悬停能力以及灵活的机动性.多旋翼微型飞行器是实现以上功能的理想选择.本文设计了一种微型四旋翼飞行器,使用三轴陀螺仪、三轴加速度计和三轴磁力计组成姿态测量系统,使用四元数算法进行姿态解算,使用互补滤波器进行数据融合以减小机体振动和陀螺漂移对姿态测量的影响.该飞行器体积小,重量轻,可垂直起降和悬停,适用于室内狭小空间的侦查任务.1
图2四旋翼飞行器动力学模型
四旋翼飞行器产生基本动作的原理为:电机l和3逆时针旋转驱动两个正桨产生升力,电机2和4顺时针旋转驱动两个反桨产生升力.反向旋转的两组电机和桨使其各自对机身产生的转矩相互抵消,保证4个电机转速一致时机身不发生转动.电机1和4转速减小(增大),同时电机2和3转速增大(减小),产生向前(后)方向的运动.电机1和2转速减小(增大),同时电机3和4转速增大(减小),产生向左(右)方向的运动.4个电机转速同时增大(减小)产生向上(向下)的运动.对角线的电机一组转速增大,另一组转速减小产生自身旋转运动.
飞行器基本工作原理
四旋翼飞行器是一种由固连在刚性十字交叉结
构上的4个电机驱动的一种飞行器.飞行器动作依靠4个电机的转速差进行控制,其机械结构相对简单,可由电机直接驱动,无需复杂的传动装置,便于微型化.四旋翼飞行器按照旋翼布置方式可分为十字模式和x模式,如图l所示.对于姿态测量和控制来说,两种方式差别不大.考虑到可能会使用向前
2
系统结构及硬件组成
四旋翼微型飞行器的系统结构如图3所示.三
轴陀螺仪、三轴加速度计和三轴磁力计组成姿态测量系统,主控制器将姿态测量系统的数据进行解算得到当前姿态,再与通过无线模块接收的姿态控制指令一起作为姿态PID控制器的输入,姿态控制器输出相应的PwM信号分别驱动4个场效应管,进而改变4个电机的转速实现姿态控制.
安装的视觉传感器,为了使视线不被遮挡,本设计使
用x模式布置方式.
飞行器相关硬件包括:①主控制器:
STM32F103RBll6,工作频率72MHz.②姿态测量系统:双轴陀螺IDG650和单轴陀螺ISZ650,三轴加速
十字模式
x模式
度计和三轴磁力计组合模块LSM303DLHc.③无线
通信模块:2.4G无线收发模块nR砣4IJDl.④驱动
圈l两种四旋翼飞行器横式示意图
万方数据
112
哈尔滨理工大’学学报第17卷
装置:4个N沟道场效应管s12302Ds.⑤动作执行装
置:4个直径6咖的空心杯电机,两对直径45Ⅱ衄正
反桨.⑥供电装置:3.7
V/130
mAh锂电池.
姿态控制指令卜—-—.1无线模块
主控制器
姿态一一一一~一一一
解算
场效应管lll场效应管2¨场效应管3l|场效应管
电机1
ll电机2
ll电机3
Il电机4
图3飞行器系统结构图
3
姿态解算
要对微型飞行器进行控制,首先要得到飞行器
的当前姿态.姿态解算需要从姿态测量系统得到原始测量数据.首先获取初始姿态,然后使用四元数算法进行姿态更新,再将四元数转换为欧拉角,通过互补滤波器进行姿态矫正,最后将矫正后的欧拉角转换为四元数并将其规范化,进行下一次的姿态更新.3.1初始姿态获取
使用欧拉角‘11‘表示姿态,令沙、口和西代表zⅨ
欧拉角,分别称为偏航角、俯仰角和横滚角.载体坐
标系下的加速度(吼。,o…o:。)和参考坐标系下的加
速度(叱。,n。叱。)之间的关系可表示为式(1).其
中c和s分别代表cos和sin.
c口c沙
cps廿
一s口蛳一c咖s砂+s吊s口c沙c币c砂+s咖s口s砂s击cp
岍
s咖s沙+c咖s扫c沙
一s币c沙+c咖sps砂
c机p
蛳
鼢[|]
㈤
万方数据
阳rctg(焘)
㈤
咖:踟tgf坠1
(4)
载体坐标系下的磁场强度(m训m,。,m:。)和参考坐标系下的磁场强度(m;。,m。,m:,)之间的关系
(4)可以求得(m引m。,m;。).再由(6)可以解得初
刚篓臼蒜蕊㈣
归rctg髦
(6)
p
沙
qo
2
o亏。虿。芎+8享8虿8芎
西
口
以.毋西
臼
廿
西
挣沙
q?_8言。虿。芎一。言8丁8芎
’。
q,=c害s詈c詈+s詈c詈s詈q2
2
o享8_c芎+8言。虿8芎
口,_8言。矿芎+8芎8虿。芎’口,=s害c争等+s手s号c等’
间隔.∞矿∞,。和棚:。代表载体坐标系下的角速度,可
q0=q。+(一ql∞。。一q2∞抛一吼∞钮)竽q1=qI+(口0∞,。+q2∞钟一93∞y。)譬
-
(8)
g:=q:+(q0∞,。一q。∞镭+g,∞,。)等
93=q3+(q0∞砧+q1山y日一92∞;。)!擎
第3期张广玉等:四旋翼微型飞行器设计
113
使用加速度计和磁力计对其进行矫正.首先使用式
(9)将更新后的四元数转换为欧拉角,然后使用互
补滤波器进行矫正,基本原理如图4所示,其公式表
示为式(10).其中下标g代表由陀螺得到的欧拉
角,下标n代表由加速度计得到的欧拉角,下标e代
表经互补滤波器矫正后的欧拉角估计值.
,^:。。胁仁!!!鱼±!!!!1沙=arctanI_『_——丁——了—、I
1.‘
臼=arcsin(2(q092一q193))
(9)
咖…an(慧餮黠)
图4互补滤波器原理示意图
et=6
g+koe。一eg]
9。=咖g+晟(咖。一咖g)(1U)
吵。=砂g+而(沙。一妒。)
静态时,使用式(3)一(6)计算的欧拉角即可作为有效值.动态时,造成加速度计角度计算误差的因
素有两个.一是电机和旋翼旋转时引起的振动,二是
除重力之外的外力产生的加速度.振动通常可以使用低通滤波器进行处理.对于有外力加速度的情况,计算三轴加速度的合成量,并计算与重力加速度的比值,当比值处于规定区间内时,认为由加速度计算的欧拉角是可靠的,可用互补滤波器进行矫正.当比
值在区间外时,认为外力加速度过大,由加速度计算
的欧拉角不可靠,取消矫正,仅用陀螺计算的欧拉角进行四元数更新.互补滤波器融合系数五由式(11)表示,即
,f0.02'0.8<业出<1.2…、
,’r———1———f
席=fg
(1』,
【0,其他
3.4规范化四元数
表征旋转的四元数应该是规范化四元数,但是
由于计算误差等因素,计算过程中四元数会逐渐失
去规范化特性,因此必须对四元数做规范化处理.
使用互补滤波器矫正后的欧拉角,先由式(7)转换为四元数,然后使用式(12)对其进行规范化后
万方数据
再进行更新操作.
90
g。=g。/√孬了亓了孺
2q。7√q。+91+92+q3
,厅—T—丌
r—i————i————i———T
(12)
g:29z/√蕊+譬i+呸+菇
q,=93/ ̄/蠢+g:+g;+g;
1j
】j
V】u1‘
川’
4
飞行器姿态PID控制器
四旋翼微型飞行器的控制目标是使其在无动作
指令时保持稳定悬停状态,有动作指令时有效完成指定动作.PID控制器结构简单,稳定性好,工作可靠,调整方便,在工业控制中被广泛使用¨2。“’.本文使用PID控制器进行飞行器的姿态控制,无需对飞行器进行精确的数学建模,原理图如图5所示.以姿
态欧拉角的期望值与计算值之差作为PID控制器的输入,每个电机的对应的PwM控制量都是三个PID
控制器输出的叠加,叠加量的正负与电机位置相关.
姿态控制与升力控制相结合,使飞行器能够完成三维空间的各种运动.
图5飞行器姿态Pm控制器原理图
5
飞行器技术指标
四旋翼微型飞行器实物如图6所示.整机重量
22
g(含电池),有效载荷5g,最大尺寸15cm.前端
预留了视觉传感器接口,以便进行视觉辅助导航任务.实验表明,四旋翼微型飞行器飞行时间大于
5
min,可垂直起降和悬停,动作灵活,适合狭小空间
飞行.
114
哈尔滨理工大学学报
[3]
wⅡSON
JR.Mic阳sTAR
Meets
第17卷
MAV[J].Aer03pace
Ameri—
c¨,1999,10(2):32—35.
[4]李彦华,石文蕊.微型飞行器对传统航空技术的挑战[J].国际
航空.2伽O(5):41—44.[5]
KR00I,PRJNzF,sHANTzM,et且1.1'忙Mesicopter:A
atufe
Mini—
Rotorc劬concept,Ph蛳II1nⅫmReport[R].St_山rd:
M
StanfordUniversjty,2000.
图6
四旋翼微型飞行器实物图
‘
[6]
KEENNON
T,GRAsMEYEJM.Devel叩meTnoftheBlack
a
Widow明dMicmbatMAVsandVisi∞oftheFutu陀0fMAV
Designe[R].D8yton:AIAA,2003.
6
结语
[7]BRIDGEsA.Flyi“g
Roh出createaBu盟[M].Monte糟y
county
He叫1.2002:15—20.
设计了一种微型四旋翼飞行器,对其工作原理进行了描述,对构成飞行器的相关硬件及整体参数进行了说明.给出了飞行器姿态解算过程,对陀螺测量误差使用互补滤波器进行矫正,提出了互补滤波器融合系数的确定方法,介绍了PID姿态控制器的原理.该微型飞行器体积小,重量轻,结构紧凑,具有垂直起降和自主悬停能力,在有效负载范围内可扩展视觉传感器或其他辅助定位装置,实现避障以及自主导航,适用于狭小空间的侦查任务.参考文献:
[1]
McMIcHAELJM,FRANcIs
New
M
[8]陈国栋,贾培发,刘艳.微型飞行器的研究与发展[J].机器人
技术与应用,2006,2:34—44.
[9]杨兰生,钟钢.仿生扑翼飞行机构模型的研究[J],哈尔滨理工
大学学报,1992,16(1):l~8.
【10]陈亮,管贻生,张宪民.仿鸟扑翼机器人气动力建模与分析
[J].华南理工大学学报:自然科学版,2叭l,39(6):53—
57.70.
[11]张天光.王秀萍,王丽霞.等.捷联惯性导航技术[M].北京:
国防工业出版社.2007:15—28.
[12]吴晓剐。王旭东,井济民.混合动力汽车电子节气门的模糊自
适应PID控制[J].哈尔滨理工大学学报,20lo,1:l一4.
[13]王旭东,孙慧博,张道杰.测功机模糊PID控制动态仿真研究
[J].哈尔滨理工大学学报,2009,2:59—62.
s.MicroAiTVehicIe—T(.ward
a
[14]上官霞南,江东,顾玉武,等,混合磁悬浮球系统变参数PID
控制仿真[J].哈尔滨理工大学学报,2007,2:31—34.
Dimensi叩inFlight[R].us:DARPA,1997.
M
[2]GRAsMEYERJM,KEENNONwidowMicm
Air
T.DevelopmenloftheBlack
VehicIe[R].Reno:AIAA,2001.
(编辑:温泽宇)
万方数据


四旋翼微型飞行器设计作者:
作者单位:
刊名:
英文刊名:
年,卷(期):张广玉, 张洪涛, 李隆球, 王林, ZHANG Guang-yu, ZHANG Hong-tao, LI Long-qiu, WANG Lin哈尔滨工业大学机电工程学院,黑龙江哈尔滨,150001哈尔滨理工大学学报Journal of Harbin University of Science and Technology2012,17(3)
本文链接:http://d..cn/Periodical_heblgdxxb201203026.aspx