综合性实验报告
实 验 课 程:传感器与检测技术
实 验 名 称:位移检测传感器的应用
姓 名:
学 号:
班 级:
指 导 教 师:
实 验 日 期: 20##年12月17日
位移检测传感器应用
一、实验类型
位移检测综合性实验
二、实验目的和要求
1.了解微位移、小位移、大位移的检测方法。
2.运用所学过的相关传感器设计三种位移检测系统。
3.对检测系统进行补偿和标定。
三、实验条件
本实验在没有加速度、振动、冲击(除非这些参数本身就是被测物理量)及环境温度一般为室温(20±5℃)、相对湿度不大于85% ,大气压力为101±7kPa的情况下进行。
四、实验方案设计
为了满足实验要求,现使用电涡流,光纤,和差动三种传感器设计位移检测系统,电涡流取0.1mm为单位,光纤取0.5mm为单位,差动取0.2mm为单位。进行试验后,用MATLAB处理数据,分析结论。
(一):电涡流传感器测位移
实验原理: 通过高频电流的线圈产生磁场,当有导电体接近时,因导电体涡流效应产生涡流损耗,而涡流损耗与导电体离线圈的距离有关,因此可以进行位移测量。
(二):光纤传感器测位移
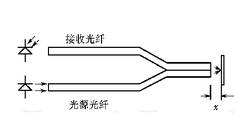
实验原理: 反射式光纤位移传感器是一种传输型光纤传感器。其原理如图36-1所示:光纤采用Y型结构,两束光纤一端合并在一起组成光纤探头,另一端分为两支,分别作为光源光纤和接收光纤。光从光源耦合到光源光纤,通过光纤传输,射向反射面,再被反射到接收光纤,最后由光电转换器接收,转换器接收到的光源与反射体表面的性质及反射体到光纤探头距离有关。当反射表面位置确定后,接收到的反射光光强随光纤探头到反射体的距离的变化而变化。显然,当光纤探头紧贴反射面时,接收器接收到的光强为零。随着光纤探头离反射面距离的增加,接收到的光强逐渐增加,到达最大值点后又随两者的距离增加而减小。反射式光纤位移传感器是一种非接触式测量,具有探头小,响应速度快,测量线性化(在小位移范围内)等优点,可在小位移范围内进行高速位移检测。
(三):差动电感式传感器测位移
实验原理: 差动动螺管式电感传感器由电感线圈的二个次级线圈反相串接而成,工作在自感基础上,由于衔铁在线圈中位置的变化使二个线圈的电感量发生变化,包括两个线圈在内组成的电桥电路的输出电压信号因而发生相应变化。
五、实验步骤
(一):电涡流传感器测位移
1.按下图1安装电涡流传感器。
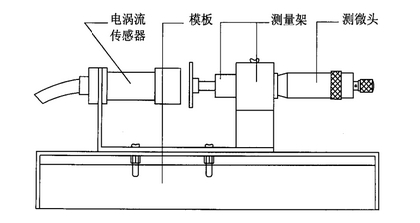
图1
2.在测微头端部装上铁质金属圆盘,作为电涡流传感器的被测体。调节测微头,使铁质金属圆盘的平面贴到电涡流传感器的探测端,固定测微头。
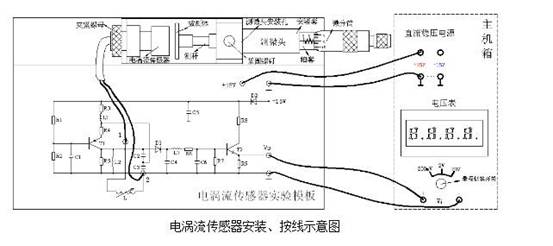
图2
3.传感器连接按图2,将电涡流传感器连接线接到模块上标有“”的两端,实验 模块输出端Uo与数显单元输入端Ui相接。数显表量程切换开关选择电压20V档,模块电源用 连接导线从实验台接入+15V电源。 4.打开实验台电源,记下数显表读数,然后每隔0.2mm读一个数,直到输出几乎不变为止。
将结果列入下表1。
(二):光纤传感器测位移
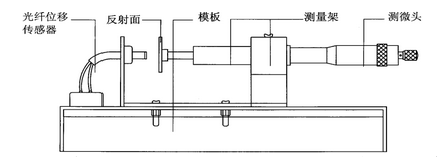
1.光纤传感器的安装如图36-2所示,将Y型光纤安装在光纤位移传感器实验模块上。探头对准镀铬反射板,调节光纤探头端面与反射面平行,距离适中;固定测微头。接通电源预热数分钟。
2.将测微头起始位置调到14cm处,手动使反射面与光纤探头端面紧密接触,固定测微头。 3.实验模块从主控台接入±15V电源,打开实验台电源。
4.将模块输出“Uo”接到直流电压表(20V档),仔细调节电位器Rw使电压表显示为零。 5.旋动测微器,使反射面与光纤探头端面距离增大,每隔0.1mm读出一次输出电压U值,
填入下表2
(三):差动电感式传感器测位移
实验内容与步骤 1、按差动变压器性能实验将差动变压器安装在差动变压器实验模块上,将传感器引线插入实验模块插座中。
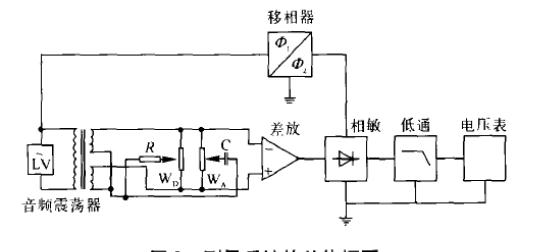
2、连接主机与实验模块电源线,按下图连线组成测试系统,两个次级线圈必须接成差动状态。
3、使差动电感传感器的铁芯偏在一边,使差分放大器有一个较大的输出,调节移相器使输入输出同相或者反相,然后调节电感传感器铁芯到中间位置,直至差分放大器输出波形最小。
4、调节Rw1和Rw2使电压表显示为零,当衔铁在线圈中左、右位移时,L2≠L3,电桥失衡,输出电压信号的大小与衔铁位移量成比例。
5、以衔铁位置居中为起点,分别向左、向右各位移5mm,记录V、X值并填入
下表3
六、原始数据记录
表一:电涡流

表二:光纤

表三:差动
七、数据整理、分析
(一)、电涡流传感器测位移
1、用matlab作出表一的拟合直线和正行程位移----电压曲线,用matlab编程,
运行程序结果如下图所示:
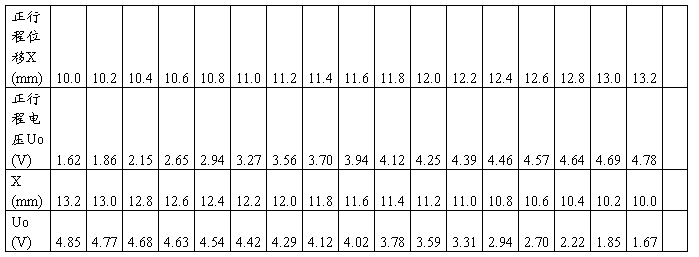
电涡流传感器正行程测位移
图中的红线为实验数据点,描点法绘制的曲线是根据表一实测数据绘制的特性曲线图,图中用直线则是MATLAB基于最小二乘法原理确定的拟合直线,省去了用坐标纸绘图的人为误差和手工计算的繁杂的计算工程,节省了工作量,提高了效率。
设拟合直线的直线方程位p=bx+a (b为拟合直线的斜率,a为截距)则: b=0.4259 a= 0.7500
2、计算其灵敏度和线性度。
传感器的灵敏度定义为在稳态下输出的变化对输入变化的比值,对于线性传感器,它的灵敏度就是静态特性的斜率,即灵敏度S=y/x=K,K为一常数,非线性传感器的灵敏度为一变量,在实验数据处理中,一般将拟合直线的斜率作为传感器的灵敏度,由程序运行结果可知拟合直线的斜率b即为传感器的灵敏度,所以灵敏度为
S=0.4259 
 (1)
(1)
另一个重要参数是非线性误差,定义为实际静态特性曲线与拟合直线之间的偏差,即为
 =
= % (2)
% (2)
式中L最大非线性绝对误差; 一输出满量程。
一输出满量程。
为了计算非线性误差,必须先求出最大非线性绝对误差和输出满量程,matlab提供了强大的数值计算功能,求L也很简单,在上面程序中应用最小二乘法求得了拟合直线方程以及35个位移测试点所对应的拟合输出值,求两者的差并取其中最大值即为最大非线性绝对误差。程序如下:
y2=y1-Y (3)
L=max(y2) (%计算最大非线性绝对误差) (4)
运行程序,得到 L=0.5835,进而由线性度的定义,可得其线性度为:
=
 =11.2%
=11.2%
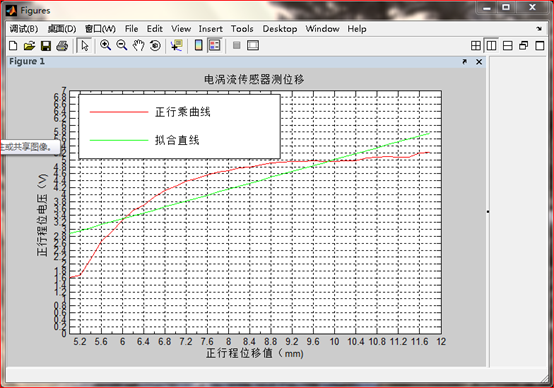
2、迟滞性
传感器在正行程(输入量增大)反行程(输入量减小)期间输出与输入特性曲线不重合的程度即为迟滞误差。。用matlab计算传感器的迟滞性如下所示:
运行程序结果如下图所示:
电涡流正反行程测位移(迟滞性)(红线为正行程,绿线为反行程)
(二)、光纤传感器测位移
1、用matlab作出表二的拟合直线和正行程位移----电压曲线,用matlab编程,其程序如下所示:
x1=3:0.5:15;
y1=[3.83 3.71 3.51 3.26 3.01 2.76 2.53 2.31 2.10 1.91 1.73 1.57 1.43 1.3 1.17 1.07 0.97 0.88 0.79 0.72 0.66 0.60 0.53 0.49 0.48];
k=polyfit(x1,y1,1) (%计算拟合直线的斜率b、截距a)
Y=polyval(k,x1) (%计算X数据点的拟合输出值)
hold
plot(x1,y1,'r-',x1,Y,'g-')
grid on
xlabel('正行程位移值(mm)')
ylabel('正行程位电压(V)')
axis([0,16,0,7])
title('光纤传感器测位移')
运行程序结果如下图所示:
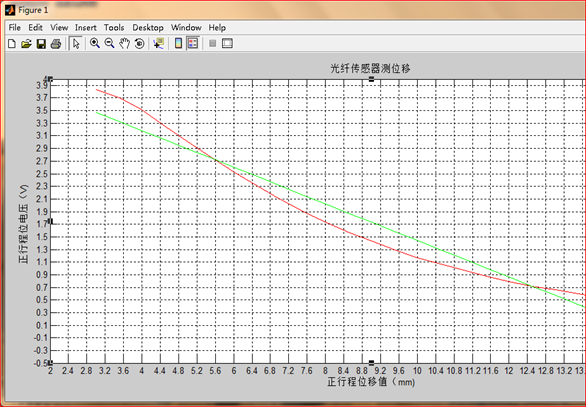
图中的红线为实验数据点,描点法绘制的曲线是根据表三实测数据绘制的特性曲线图,图中用直线则是MATLAB基于最小二乘法原理确定的拟合直线,省去了用坐标纸绘图的人为误差和手工计算的繁杂的计算工程,节省了工作量,提高了效率。
设拟合直线的直线方程位p=bx+a (b为拟合直线的斜率,a为截距)则: b=-0.2899 a= 4.3422 -0.2899 4.3422
2、计算其灵敏度和线性度。
传感器的灵敏度定义为在稳态下输出的变化对输入变化的比值,对于线性传感器,它的灵敏度就是静态特性的斜率,即灵敏度S=y/x=K,K为一常数,非线性传感器的灵敏度为一变量,在实验数据处理中,一般将拟合直线的斜率作为传感器的灵敏度,由程序运行结果可知拟合直线的斜率b即为传感器的灵敏度,所以灵敏度为
S=-0.2899 (1)
另一个重要参数是非线性误差,定义为实际静态特性曲线与拟合直线之间的偏差,即为
=% (2)
式中L最大非线性绝对误差;一输出满量程。
为了计算非线性误差,必须先求出最大非线性绝对误差和输出满量程,matlab提供了强大的数值计算功能,求L也很简单,在上面程序中应用最小二乘法求得了拟合直线方程以及31个位移测试点所对应的拟合输出值,求两者的差并取其中最大值即为最大非线性绝对误差。程序如下:
y2=y1-Y (3)
L=max(y2) (%计算最大非线性绝对误差) (4)
运行程序,得到 L= 0.4868,进而由线性度的定义,可得其线性度为:
= =12.7%
=12.7%
2、迟滞性
传感器在正行程(输入量增大)反行程(输入量减小)期间输出与输入特性曲线不重合的程度即为迟滞误差。。用matlab计算传感器的迟滞性:
运行程序结果如下图所示:

光纤正反行程测位移(迟滞性)(红线为正行程,绿线为反行程) (三)、差动电感式传感器测位移实验数据的处理:
用matlab作出表三的拟合直线和正行程位移----电压曲线,用matlab编程,
运行程序结果如下图所示:

图一 差动正行程位移
图中的红线为实验数据点,描点法绘制的曲线是根据表三实测数据绘制的特性曲线图,图中用直线则是MATLAB基于最小二乘法原理确定的拟合直线,省去了用坐标纸绘图的人为误差和手工计算的繁杂的计算工程,节省了工作量,提高了效率。
设拟合直线的直线方程位p=bx+a (b为拟合直线的斜率,a为截距)则: b=2.2203 a=-22.2227
3、计算其灵敏度和线性度。
传感器的灵敏度定义为在稳态下输出的变化对输入变化的比值,对于线性传感器,它的灵敏度就是静态特性的斜率,即灵敏度S=y/x=K,K为一常数,非线性传感器的灵敏度为一变量,在实验数据处理中,一般将拟合直线的斜率作为传感器的灵敏度,由程序运行结果可知拟合直线的斜率b即为传感器的灵敏度,所以灵敏度为
S=2.2203 (1)
另一个重要参数是非线性误差,定义为实际静态特性曲线与拟合直线之间的偏差,即为
=% (2)
式中L最大非线性绝对误差;一输出满量程。
为了计算非线性误差,必须先求出最大非线性绝对误差和输出满量程,matlab提供了强大的数值计算功能,求L也很简单,在上面程序中应用最小二乘法求得了拟合直线方程以及25个位移测试点所对应的拟合输出值,求两者的差并取其中最大值即为最大非线性绝对误差。程序如下:
y1=y-Y (3)
L=max(y1) (%计算最大非线性绝对误差) (4)
运行程序,得到 L= 1.1678,进而由线性度的定义,可得其线性度为:
= =5.97%
=5.97%
2、迟滞性
传感器在正行程(输入量增大)反行程(输入量减小)期间输出与输入特性曲线不重合的程度即为迟滞误差。。用matlab计算传感器的迟滞性:
运行程序结果如下图所示:

差动正反行程测位移(迟滞性)
八、结论
本次综合性实验我们分别用了电涡流,光纤和差动三种传感器设计位移检测系统,电涡流取0.1mm为单位,光纤取0.5mm为单位,差动取0.2mm为单位。进行试验后,用MATLAB处理数据,分析结论。
其中电涡流位移传感器实验中它的灵敏度经实验测得S=0.4259 ,其线性度为:
==11.2%
其中光纤位移传感器实验中它的灵敏度经实验测得S=-0.2899,其线性度为:
==12.7%
其中差动位移传感器实验中它的灵敏度经实验测得S=2.2203 ,其线性度为:
==5.97%
第二篇:电感式位移传感器的设计
第 卷 第 1、2 期
第91、2 期 无 锡 南 洋 职 业 技 术 学 院 论 丛 Journal of Wuxi Nanyang Vocational College
Vol.9 No.1&2 June 2010
电感式位移传感器的设计
袁道香
[摘 要] 针对目前电感式位移传感器的应用现状,
制系统中。
[关键词 ] 电感式传感器;自感式传感器
[中图分类号] G807 本文提出了一种新的电感式位移传感器的设计 方法,具有控制及数据处理等功能,结构简单、成本低等优点,可以广泛应用于机械位移的测量与控 [文献标识码]A
[文章编号] JS-B059(2010)01-0046-05
一、引言
(一)传感器的定义
国家标准 GB7665- 87 对传感器下的定义是:“能感受规定的被测量并按照一定的规律转换成可用信号 的器件或装置,通常由敏感元件和转换元件组成。”传感器是一种检测装置,能感受到被测量的信息,并能将
检测感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存
储、显示、记录和控制等要求。它是实现自动检测和自动控制的首要环节。
(二)传感器的作用
人们为了从外界获取信息,必须借助于感觉器官。而单靠人们自身的感觉器官,在研究自然现象和规律
以及生产活动中它们的功能就远远不够了。为适应这种情况,就需要传感器。因此可以说,传感器是人类五官 的延长,又称之为电五官。
新技术革命的到来,世界开始进入信息时代。在利用信息的过程中,首先要解决的就是要获取准确可靠
的信息,而传感器是获取自然和生产领域中信息的主要途径与手段。
在现代工业生产尤其是自动化生产过程中,要用各种传感器来监视和控制生产过程中的各个参数,使设
备工作在正常状态或最佳状态,并使产品达到最好的质量。因此可以说,没有众多的优良的传感器,现代化 生产也就失去了基础。
在基础学科研究中,传感器更具有突出的地位。现代科学技术的发展,进入了许多新领域:例如在宏观 上要观察上千光年的茫茫宇宙,微观上要观察小到纳米的粒子世界,纵向上要观察长达数十万年的天体演
化,短到 秒的瞬间反应。此外,还出现了对深化物质认识、开拓新能源、新材料等具有重要作用的各种极端技 术研究,如超高温、超低温、超高压、超高真空、超强磁场、超弱磁砀等等。显然,要获取大量人类感官无法直 接获取的信息,没有相适应的传感器是不可能的。许多基础科学研究的障碍,首先就在于对象信息的获取存
在困难,而一些新机理和高灵敏度的检测传感器的出现,往往会导致该领域内的突破。一些传感器的发展, 往往是一些边缘学科开发的先驱。
传感器早已渗透到诸如工业生产、宇宙开发、海洋探测、环境保护、资源调查、医学诊断、生物工程、
收稿日期:2010- 04- 15
作者简介:袁道香(1979-),女,江苏射阳人,工程硕士,无锡南洋职业技术学院电子与信息工程系教师,江苏无锡 214081。
46

无 锡 南 洋 职 业 技 术 学 院 论 丛
第 9 卷
文物保护等等极其之泛的领域。 [1]
由此可见,传感器技术在发展经济、推动社会进步方面的重要作用,是十分明显的。世界各国都十分重 视这一领域的发展。相信不久的将来,传感器技术将会出现一个飞跃,达到与其重要地位相称的新水平。
(三)传感器的分类
按照其用途,传感器可分类为:压力敏和力敏传感器;位移传感器;液面传感器;能耗传感器;速度传感
器;加速度传感器 ;射线辐射传感器;热敏传感器等等。 [2]
位移传感器又称为线性传感器,把位移转换为电量的传感器,位移传感器是一种属于金属感应的线性器
件。传感器的作用是把各种被测物理量转换为电量,它分为电感式位移传感器,电容式位移传感器,光电式 位移传感器,超声波式位移传感器,霍尔式位移传感器。
在这种转换过程中有许多物理量(例如压力、流量、加速度等)常常需要先变换为位移,然后再将位移变
换成电量。因此位移传感器是一类重要的基本传感器。在生产过程中,位移的测量一般分为测量实物尺寸和 机械位移两种。机械位移包括线位移和角位移。按被测变量变换的形式不同,位移传感器可分为模拟式和数 字式两种。模拟式又可分为物性型(如自发电式)和结构型两种。常用位移传感器以模拟式结构型居多,包括 电位器式位移传感器、电感式位移传感器(见电感式传感器)、自整角机、电容式位移传感器(见电容式传感 器)、电涡流式位移传感器(见电涡流式传感器)、霍尔式位移传感器等。数字式位移传感器的一个重要优点
是便于将信号直接送入计算机系统(见数字式传感器)。这种传感器发展迅速,应用日益广泛(见感应同步器、
码盘、光栅式传感器、磁栅式传感器)。
二、电感式位移传感器的设计
本设计内容为设计电感式位移传感器,在设计时所要达到的要求有如下 4 点:(1)能够检测 0~20cm 的
位移;(2)电压输出为 1~5V;3)电流输出为 4~20mA;4)能进行数字显示。
(一)设计的总体模块
主要由直流稳压电源、振荡电路、电感传感器、解调器、差动放大电路、V/I 转换电路、A/D 转换电路、LED
显示电路等构成。总体设计框图如下:
图 1 电感式位移传感器的设计总体框图
(二)各模块的设计电路
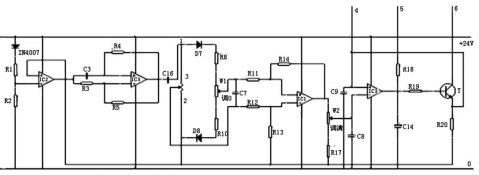
电路包含两个部分:模拟电路部分和数字显示部分,分别如图 2、图 3 和图 4 所示。整个电路的工作原理
如下所述:直流稳压电源为整个电路提供电源,图 3 中 IC2 构成电压跟随器,产生并输出提供给模拟电路电
位公共点;IC3 构成方波信号发生器,在电路中产生方波电压提供给电感式传感器,电感式传感器接成桥式
电路,电桥输出的不平衡电压与传感器中衔铁位移成正比。电桥输出的信号比较小,则需图 3 中 IC1 差动放
大电路放大到一定程度才能工作。需图 3 中 IC3 与中功率三极管 T 组成电压 - 电流(V/I)转换电路,产生电
流通过 6 脚输出,提供给双积分 A/D 转换器,然后再在 LED 显示器上显示出来。
1、模拟电路部分
47
第 1、2 期
袁道香:电感式位移传感器的设计 图 2 电感式位移传感器的直流稳压电源 图 3 电感式位移传感器的具体电路图
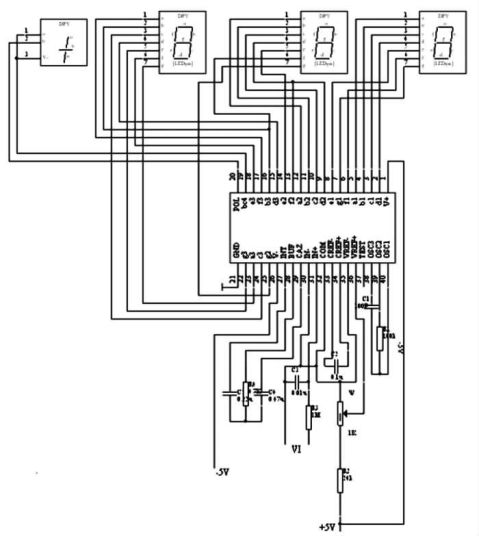
2、数字电路部分
图 4 数字电压表的接线图 48
无 锡 南 洋 职 业 技 术 学 院 论 丛
第 9 卷
用 7107 构成数字电压表的接线如图 4 所示,模拟电路中 6 脚输出的电流外接一个 10Ω 的精密电阻,转
换成电压从图 4 中 VI 输入端输入。
该表的量程 VM=200mV,也叫基准档或基本表。下面逐一介绍各元件的作用:
R1、C1 为时钟振荡的 RC 网络。
R2、R3 是基准电压的分压电路,R2 是可调电阻,R3 是固定电阻。调整 R2 使基准电压
VREF=100.0mV。
R2 一般采用精密多圈电位器。
R4、C3 为输入端阻容滤波电路,以提高仪表的抗干扰能力,并能增强仪表的过载能力。因 7107 输入阻
抗很高,输入电流极小,故可取 R4=1MΩ,C3=0.01uF。
C2、C4 分别是基准电容和自动调零电容。
R5、C5 分别是积分电阻和积分电容。
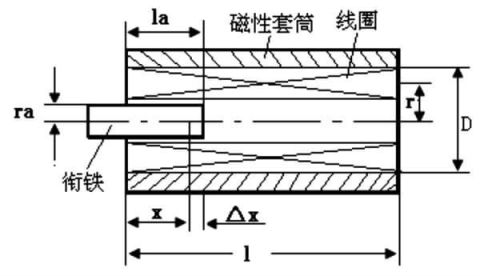
3、电感式传感器
图 5 为螺管式自感传感器结构原理图。它由平均半径
为 r 的螺管线圈、衔铁和磁性套筒等组成。随着衔铁插入
的深度的不同将引起线圈泄露路径中磁阻变化,从而使线
圈的电感发生变化。
根据磁路结构,磁通主要由两部分组成:沿轴向贯穿
图 5 螺管式自感传感器原理图 整个线圈后闭合的主磁通 φm 和经衔铁侧面气隙闭合的
侧磁通 φs(漏磁通)。因气隙较大,故磁性材料的磁阻可忽略不
计。
设衔铁处于图示位置。这时,线圈电流 I 产生的主磁通和主磁链分别为:
φm=IwπR2u0/(l- la)
ψm=Wφm= IW2πR2u0/(l- la)
式中 l,la—分别为线圈长度与衔铁插入深度;
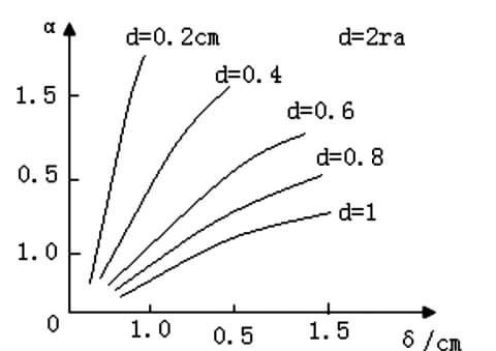
R—磁通作用半径,由衔铁半径 ra 与端部空气隙大小而定。R=ra(1+α),α 为修正系数,可由图 6 查得。
侧磁通 φ 通过衔铁侧面与线圈交链,交链部分只是衔铁侧面遮盖部分的线圈。在线圈的轴向不同位置 处,磁势 IWx 是不同的,且交链到的线圈匝数也不一样。由图 5,离线圈端面 x 处的磁势为:Fx=IWx=IW·x/l
根据两同心圆柱面磁极间的磁导计算公式,可得半径为 ra 的衔铁与内径为 D 的磁性套筒间的比磁导 (单位长度的磁导):G=2πμ0/﹒D/2ra)
于是,微分单元磁导为 gdx,x 处的微分单元磁通为 dφx=Fx·gdx。此微分单元磁通匝链的线圈匝数为 Wx=W·x/l,故微分单元磁链:
Dψx=Wxdφx=(IW2gx2)/(l2)dx
整个线圈的侧磁链:
ψs=∫dψx=IW2·gla3 /3l2
整个线圈的总磁链为主磁链和侧磁链之和,即
ψ=ψm+ψx=IW2[πR2u0/(l- la)+ gla3 /3l2]
线圈的电感量:
L=ψ/I= W2[πR2u0/(l- la)+ gla3 /3l2]
由于传感器轴向气隙较大,存在磁通边缘效应, 故可认为在衔铁移动的一定范围内主磁通近似不变。 这时,衔铁位移仅引起侧电感 Ls 变化。传感器的灵敏 度:
图 6 磁通作用半径修正系数
49
第 1、2 期
袁道香:电感式位移传感器的设计
KH=dL/dla=dLs/dla=W2gla2 /l2=3Ls/la
式中,Ls=W2·gla3/3l2,为侧磁链引起的电感。
螺管式自感传感器有以下特点:
(1)由于空气隙大,磁路磁阻大,故灵敏度低,欲提高灵敏度,可提
高
ra/r 与 la/l,增加匝数,但受稳定性限制;
(2) 从磁通分布看,只要满足主磁通不变与线圈绕组排列均匀的条
件,可望得到较大的线性范围。
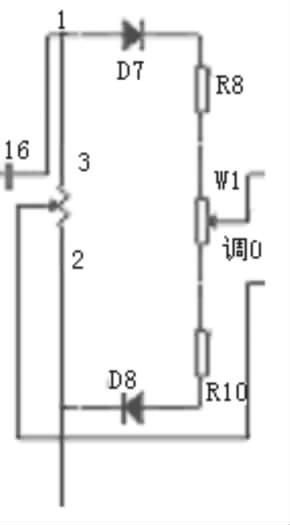
差动自感传感器是将公共衔铁的两个相同自感传感器结合在一起的
一种传感器,它可以用图 7 所示,在图中,当衔铁的位移处于中间位置
时,
两线圈电感相等,负载 Zf 上就没有电流,此时 D7、D8 上电流 I1=I2,
△I=0,输出 VSC=0。
当衔铁有位移时,一个自感传感器的气隙增加,另一个减小;从而使
一个自感传感器的电感值减小,而另一个增大,此时 I1≠I2,在负载 Zf2,,
就产生△I 和输出电压 VSC,其电流△I 或输出电压大小即可表示衔铁的
位移,同时衔铁移动的方向不同,输出的电压的极性亦不同,这样,根据
输
出电流或输出电压的大小极性,就可知道衔铁位移的大小和方向,根据磁
路结构的不同,可以有各种结构形式的差动自感传感器。为了减少误差,
图 7 差动自感传感器 每次检测之前我们都要经过调 0,当可变电阻调到中间时,两边桥臂相等
即为 0 处,这时电流显示 4mA。
三、
总结
该设计的电路模块主要包括直流稳压电源、振荡电路、电感传感器、解调器、差动放大电路、V/I 转换电
路、A/D 转换电路、LED 显示电路等,结构简单,容易实现。
[ 参考文献]
[1] 贾伯年,俞 朴. 传感器技术[M]. 南京:东南大学出版社,2006:68- 69
[2] 王煜东. 传感器及应用[M]. 北京:机械工业出版社,2005:5- 9
The Design of Inductive Displacement Transducer
YUAN Dao- xiang
Abstract:According to the current application situation of the Inductive Displacement Transducer,The artical
introduces the disign of an Inductive Displacement Transducer. Characteristics of simple structure, control function,
data processing,low cost ,So it can be applied to precise measurement of mechanical displacement and control system.
Key Words:Inductive Displacement Transducer ;Self- sensing Magnetic Bearing
50