哇哈哈
PMSM参数测量实验
测量永磁同步电机定子电阻、交轴电感、直轴电感、转子磁链以及转动惯量。
1. 定子电阻的测量
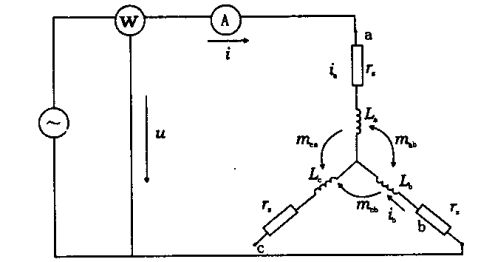
采用直流实验的方法检测定子电阻。通过逆变器向电机通入一个任意的空间电压矢量Ui(例如U1)和零矢量U0,同时记录电机的定子相电流,缓慢增加电压矢量Ui的幅值,直到定子电流达到额定值。如图1所示为实验的等效图,A、B、C为三相定子绕组,Ud为经过斩波后的等效低压直流电压。Id为母线电流采样结果。当通入直流时,电机状态稳定以后,电机转子定位,记录此时的稳态相电流。因此,定子电阻值的计算公式为:
 (1)
(1)
 (2)
(2)
图1 电路等效模型
2. 直轴电感的测量
在做直流实验测量定子电阻时,定子相电流达到稳态后,永磁转子将旋转到和定子电压矢量重合的位置,也即此时的d轴位置。测定定子电阻后,关断功率开关管,永磁同步电机处于自由状态。向永磁同步电机施加一个恒定幅值,矢量角度与直流实验相同的脉冲电压矢量(例如U1),此时电机轴不会旋转(ω=0),d轴定子电流将建立起来,则d轴电压方程可以简化为:


 (3)
(3)
对于d轴电压输入时的电流响应为:
 (4)
(4)
利用式(4)以及测量得到的定子电阻值和观测的电流响应曲线可以计算得到直轴电感值。
其中U/R为稳态时的电流反应,R为测得的电机定子电阻。由上式可知电流上升至稳态值的0.632倍时, ,电感与电阻的关系式可以写成:
,电感与电阻的关系式可以写成:
 (5)
(5)
其中t0.632为电流上升至稳态值0.632倍时所需的时间.
3. 交轴电感的测量
测出Ld之后,在q轴方向(d轴加90°)施加一脉冲电压矢量。电压矢量的作用时间一般选取的很短,小于电机的机械时间常数,保证电机轴在电压矢量作用期间不会转动。则q轴电压方程可以简化为:


 (6)
(6)
q轴电流将按如下的指数形式建立:
 (7)
(7)
利用测量直轴电感的方法同样可以测量交轴电感。
此外,由于没有正好超前d轴90°的电压矢量,需要施加一个60°和120°合成矢量来完成等效q轴电压矢量的施加过程。并且在进行脉冲电压实验的过程中,电压幅值和作用时间
应选择适当。电压幅值选择太小,影响检测精度,过大可能使电流超过系统限幅值影响系统安全。作用时间过短,采样点少,获取的电流信息少,也会影响检测精度,作用时间过长,电流同样可能过大影响系统安全,并且电机容易发生转动。
4. 反电势系数的测量
采用空载实验法,即用测功机带动被测永磁同步电机以一定的转速旋转,同时保持被测电机负载开路,测试此时的电机空载相电压,即为反电势电压。结合转速、反电势可以计算得出相应的反电势系数,计算公式如下:
 (8)
(8)
式中:E为反电势,n为转速。电机的反电势系数,其定义为每1000PRM时电机每相绕组上的反电势电压的有效值(请注意不是线线电压,是线到中性线的电压,单位为:V/KRPM/相)
这种方法需要将被测电机运行至发电状态,并且需要负载开路手动测试反电势。
5. 转动惯量的测量
根据简化的电机运动方程:
 (9)
(9)
在电机恒转矩运行过程中,测量时间 内电机转速的变化
内电机转速的变化 ,即可计算得转动惯量。
,即可计算得转动惯量。
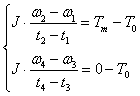
保持永磁电机定子端开路,首先用测功机以恒定转矩拖动电机加速运行,分别记录t1与t2时刻转速ω1与ω2;然后让电机自由停机,并分别记录t3与t4时刻的转速ω3与ω4。列写方程组:
 (10)
(10)
式中Tm为测功机施加给永磁电机转子的转矩,可由测功机的功率与转速求得,即Tm=P/(npω),T0为空载转矩。解方程组即可得转动惯量J。
第二篇:永磁交流伺服电动机的参数分析(Ld和Lq和绕组时间常数的测量)
永磁交流伺服电动机的参数分析莫会成
==================================================================================================设计与研究·DESIGN&RESEARCH
永磁交流伺服电动机的参数分析
莫会成
西安微电机研究所,西安(
摘
710077)
要:从永磁交流伺服电动机的基本结构出发,通过数学模型的建立和运用坐标变换,对方波和正弦波电流驱动
两类永磁伺服电动机的参数及其相互关系进行了分析和阐述,并提出了新的实用的测试方法。关键词:永磁;交流伺服电动机;参数;分析中图分类号:83.4TM3
文献标识码:A
文章编号:1001-6848(2005)03-0003-04
-MaParameterAnalysisonPermanentgnetACServomotors
-cMOHuiheng
(,10077,)Xi'anMicromotorsResearchInstituteXi'an7China
:T,tAbstracthepaperproceedsfromfundamentalstructureofPermanentMagnetACservomotorshrough,establishingmathematicalmodelandexertingtransformationofcoordinatesanalysesandexpatiatessquarewave,andsinewavecurrentdriveparameterandcorrelativityofPMservomotorsandputforwardnewappliedtest.method
:-ma;;;KeywordsPermanentgnetACServomotorPerameteranalyse
0引
言
一般而言,永磁交流伺服电动机上分布三相或多组对称绕组。绕组结构与一般同步或异步电动机相同,转子上装有产生永磁激磁磁场的高性能稀土永磁材料。产生不同的影响,从而改变电机的参数。
图1为凸装式转子永磁体的几种几何形状。图
为圆筒型整体结构,磁钢宽度与极距相等,忽略1a)
定子开槽和边缘效应时,气隙磁场为矩形波,当电机极对数较多,极弧较小时,每个磁极常采用一块永磁体;当电机直径较大,而极数相对较少时,永磁磁极采用多块磁钢拼接而成。图1b和图1c分别为瓦))片型和扇状型,永磁体厚度基本一致。极弧系数小于气隙中磁场近似梯形波。这种转子结构的伺服电1,
动机磁路结构简单。由于稀土永磁材料的相对磁导率?故而电机的径向等效气隙基本相同,电机≈1,r的交、直轴磁导也基本相等,≈λ。一般永磁无刷λdq伺服电动机常采用这种结构,因为这种结构的永磁磁极在定子绕组中所感应的反电势为梯形波,在方波电流驱动时,能产生较少的力矩波动。
图2为嵌入式和内置式转子永磁结构图。其中图2a为嵌入式,图2b。内置式转子结构))转子整体强度较好,固,且能根据需要设计成不同的气隙磁场形式,甚至
-3-
永磁交流伺服电动机发出非常迅速,无论是从功率及转矩所覆盖的范围,使用领域,还是从性能和控制精度方面来看,近年来都取得了长远的进步。根据其气隙磁场感应的反电势波形和驱动电流波形的不同,可将此类电动机分为永磁无刷伺服电动机和永磁同步伺服电动机。前者驱动电流的方波、后者驱动电流为正弦波。无论是哪种电动机,其参数对电机性能,伺服系统的设计和控制算法的生成都是至关重要的。本文力求从永磁交流伺服电动机的几种典型结构出发,通过模型的建立和恒功率坐标变换的运用,分析和归纳方波驱动和正弦波驱动时电动机各参数之间的相互关系,得出了一些新的思路,并针对工作实际,提出了较为实用的简易则试方法。
1结构特点
永磁交流伺服电动机有多种不同的结构形式:如轴向磁场和径向磁场结构、内转子和外转子结构但是最典型的最常用的还是径向磁场的内转子等,结构形式。
收稿日期:2005-05-11
微电机
20xx年第38卷第3期(总第144期)
===================================================================可采用聚磁结构提高气隙的有效磁通。
图1凸装式永磁转子结构
图2嵌入式和内置式永磁转子结构
无论是嵌入式还是内置式转子结构,由于转子外圆面向定子电抠的气隙不再均匀,故而产生凸极效应。如图所示这时d轴和q轴磁路的磁导不再相
等,很显然对图2a和图2b由于d轴磁路≠λ。)),λdq
要穿过永磁体才能形成回路,d轴的等效气隙要大于q轴的等效气隙,即有而对图c则正好<λ;)q相反,这时有λ>λ。对于需要进行恒功率弱磁控dq制,扩大速度运行范围,提高最高工作转速时,采用此种结构较为适宜

。
组对A相绕组的互感。且应有:
=Mb,=Mc,=MaMaMbMcbacbac
永磁体采用凸装式转子结构时L=L=L=Labc=Ma=Mb=MMabcc
绕组采用Y接时
+i+i=0iabc
0000sasUariL0LUb=0r0i0sb+s
Uc00ri00Lscs
则有:将式(和(代入式(并令L=L-M,2)3)1)s
(2)
(3)
2永磁无刷伺服电动机参数分析
对永磁无刷伺服电动机,由于电机的激磁磁场和反电势及电抠电流波形均非正弦波,因而不需进行坐标变换,直接利用电动机的三相变量来建立数,。
其定子三相绕组的电压方程为:
Uar00saiUb=0r0isb+dt
Ucisc00r
MaMaabcaaLieMbLMbi(1)abcb+ebMcieMcLabccc
而Ma为B相绕式中,、、LLLabc为三相绕组的自感,b
-4-
aaiei(4)b+ebdiecc
忽略凸极效应时,电机的电感和互感可表示为:
L=L+Lσ0
M=Mσ+Lcos)=Mσ-032L=L-Mσ+sσ
L02
(5)
它上式中,Lσ和Mσ为电机绕组的漏电感和漏互感,
主要与电机定子冲片的槽形尺寸和绕组端部尺寸等漏磁导有关。一般相对而言所占比重较小。L0为电
永磁交流伺服电动机的参数分析莫会成
\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\机绕组的主电感,它与电机气隙大小,定转子主磁路密切相关,在忽略漏感时:
=-L(6)Ls23
这是一个表明电机绕组磁链关系的简洁关系式,对
M=-参数的理解很有帮助。
在工程实践中,往往要对电机的参数进行现场测量,而一般情况下,为了安全起见在绕组采用Y联接时是不引出中线的。这时可采用图3所示的方式进行简易测量。
Aa=Li+Mai+Mai+AFcGsHaabbccAb=Mbi+Li+Mbi+AFcGs(H-aabbcc=Mci+Mci+Li+AFcGs(H+Acaabbcc
I1J)3(I)3式中,为转子d轴与定子a相绕组轴线之间的夹H角,AF为定子电枢绕组最大可能匝链的转子每极永磁磁链。同样无论是自感还是互感都由这两部分组成,即与定子漏磁路相关的漏电感和与气隙及定转子主磁路相关的主电感组成。由于电机等效气隙不图3永磁交流伺服电动机电感测量如图所示

,在电机的任意两相间如a、
b相)
加一个适当频率(尽可能接近额定频率的电压,这时有电压方程为:
U=iars+La
adt+Mabdt-Mb
badt
-Lbadt-Lb3
dt
-ibrs(7)
将ia=-ib=ic和式(
2)代入上式经整理后:U=2irs+2Ls
dt
(8)
可见测量的电感为2倍电机绕组的主电感Ls
。3永磁同步伺服电动机的参数分析
对三相永磁同步伺服电动机,其电压方程为:
Ua=iars
+adt
Ub=ibrs
+b
dt(E)
Ucc=icrs
+dt由于凸极效应的存在,定子绕组的磁链不仅与三相绕组有关,而且和转子永磁磁场及转子相对定子绕组的位置有关。其磁链方程的一般形式为:
再均匀,存在dK轴效应。对定子某一相绕组来说,当转子直轴与该相绕组轴重合时,该相绕组面对的是直轴气隙L而当交轴与该相绕组的轴线一致时,面对的是交轴气隙,因为直轴与交轴的气隙长度总是处于电动机气隙的两个极端位置,也就是说这两个位置面对的最大和最小两个磁导,可见气隙磁导分布按照转子位置角的偶次谐波变化。忽略高次谐波,并经推导后可得:
La=LM+LJ+L2
cGs2H(11)
其中LJ为电感的平均值,L2为二次谐波幅值,
且当OdPOK时,L2PJL当OdQOK时,L2QJL当Od=OK,L2
=J这相当于上节的情况。对互感,
经推导后可得:Mab=Mba=MM-2LJ+L2cGs(2H-3IMbc=Mcb=MM-2
LJ+L2cGs2H(12)
Mca=Mac
=MM-2LJ+L2cGs(2H+3I)一般在研究永磁同步伺服电动机时,常采用dKJ坐标系统。对式(E)R式(12)进行TaUVW和
XaUV两次变换,经整理后,可得dKG坐标系下的电(13)
由上式可知在dKJ坐标系下,电感参数与转子位置无关,这也正是进行坐标变换的基本目的之一。忽略漏电抗,即令LM
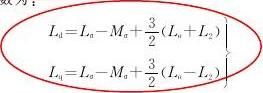
=MM=J,通过式(13)解出LJ和L2后分别代入式(
11)和式(12)就可得到三相系统下的电感参数和dKJ坐标系统下电感参数间的相互关系:
Z[Z
微电机
20xx年第38卷第3期(总第144期)
===================================================================
L=aL=b
(L+L)+(L-L)cos2θdqdq33
将式(的第1的第1项代入上式,11)、2项和式(12)
可见此时测得的电感为:
'
+L)+(-L)cos2(θ-π(LLdqdq
333
=L+L-2=2(-Mσ)+3+3LMaLσLLcosabb02s
(2+θ
=(+L)+(-L)cos2(θ+πLLLcdqdq
333(14)
)(17)3
由于电感是θ角的函数,上式对θ角求导,在-90?的范围内取得二极值点θ≤θ≤90?=±代入上式
Mab=-6(Ld+Lq)+3(Ld-Lq
)cos(2θ-3πMbc=-6(Ld+Lq)+3
(Ld-Lq)cos2θMca
=-6(Ld+Lq)+3(Ld-Lq)cos(2θ+3π(15)测量永磁同步伺服电动机参数方法有很多,如根据交、直轴同步电抗Xd和Xq的测量计算而得到其稳态电感参数;或通过电压积分法测量其参数;或通过直流衰减法加系统辨识理论测得其瞬态参数等。试方法引入而来,对永磁同步伺服电动机而言还需注意几点:a.因为绕组电阻和电感参数的比例相差不大,一般测量时不得随意忽略绕组的电阻;b.由于激磁磁场由永磁体产生,作为伺服电动机来说,只要不出现特别大的过载情况,
其磁路饱和程度变化不太大,这一点对参数设计和测量都相对有利;c.电感参数中的漏感部分能否忽略,要视具体情况而定,尤其是等效气隙的影响较大,否则会对参数的计算和测量产生较大的影响。
鉴于上述因素,根据永磁同步伺服电动机的特点,在实际工作中也可采用直接测量的方法。电机绕组Y连接且有中线引出时,测量较简单,在某一相绕组上加上适当频率的可变交流电压、调整电压和电流的幅值尽可能接近电机的实际运行值。缓慢转动转子的位置,在二个极限位置点上确定θ角,测出是电压和电流及功率等值,再利用式(1)和式(2)联立求解可得电机各参数rs,Lσ,Mσ,Lo和L2
,通过式(13)可得Ld和Lq
。这是一种简单的测试方法,不仅能测量出绕组的主电感和二次谐波电感的幅值,
而且还能测出漏自感和漏互感。实践证明,在工程应用的范围内是比较准确实用的方法之一。
在没有中线引出时,如果按图3所示的接线,由式(7)
可得:U=i·2rs+(La+Lb-2Mab
dt(16)
-6-6
得两极限位置的电感参数为:
L'
smux=2[(Lσ
-Mσ)+2
(L0+L2)]=2LdL'
smin=2[(Lσ-Mσ)+(18)
2
(L0-L2)]=2d
可见通过L'
s的两个极值的值就得到了电机的交直轴电感参数Lq和Ld。实际测量时,可以让电流恒定,通过缓慢转动转子位置,测电压的最大和最小值点的θ
角位置基本上就是上述极限位置点。由于永磁同步伺服电动机一般都采用矢量控制的方式,因而只需d、q轴参数,因而用此法测参数是一种简单方便而又可行的办法,多台样机的实测结果证明了这一点。
4结
论
本文从永磁伺服电动机的基本结构出发,借助电机的数学模型,利用坐标变换等工具,对永磁无刷和永磁同步两种伺服电动机的电感参数之间的基本关系进行了分析论证,提出了新的实用的工程测试方法。实践证明了方法的正确与可行,对此类伺服电动机的参数设计和分析用一定指导意义。
参考文献
[1]M.Aydin,S.Huang,T.A.Lipo.Anewaxialflux
surfaceMountedpermanentmagnetmachinecapableoffieldcontrol[J].IEEE.IASAnaualmeating
,Pittsburgh,USA,
2002,10:14-18[2]莫会成等.
参数对永磁无刷直流电动机稳态性能的影响[J
].微电机,1994,27(1)[3]莫会成.
方波激磁永磁无刷伺服电动机换向过程分析[J].微电机,1994,27(3)[4]
MoHuicheng.TheTorquerippleofpermanent
magneta.c.servo-motordrivedtyasinusoidalcurrentandsquarecurrent[J].Proceedingof
CICEM,
1991作者简介:莫会成(1962-),男,湖南常德人,教授级高级工程师,长期从事微特电机技术及科研管理工作。