课程实验报告
课 程 名 称: 局域网与组网工程
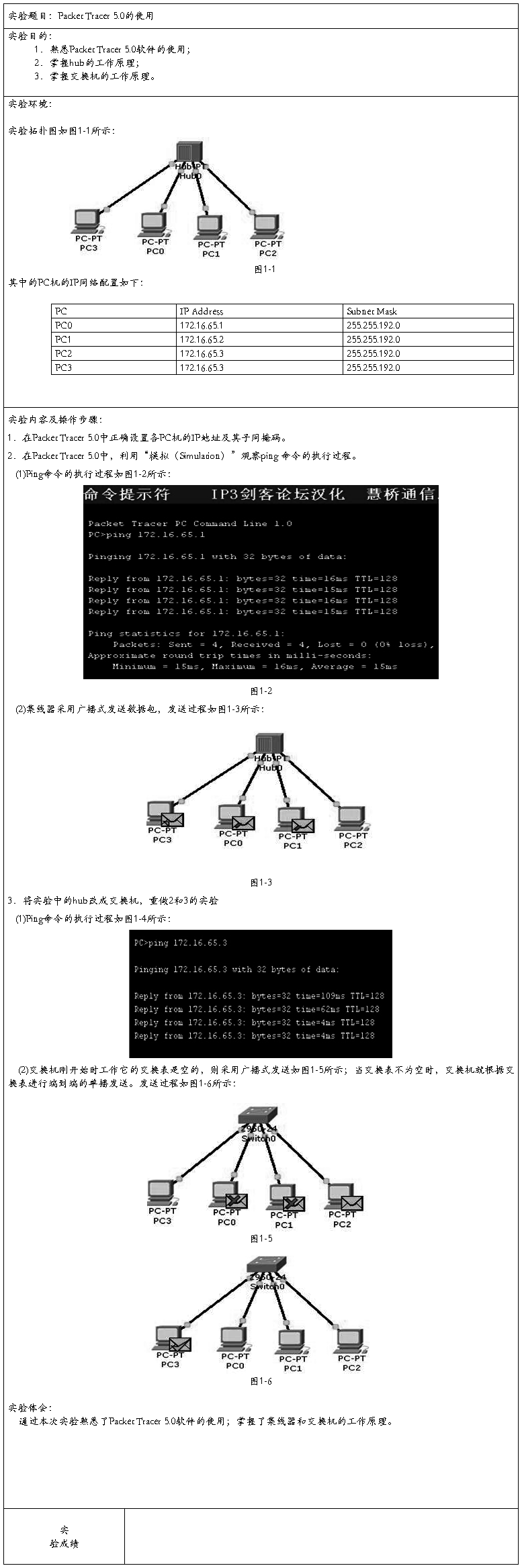
实验项目名称:实验一Packet Tracer 5.0的使用
专 业 班 级: 计算机科学与工程系
姓 名: xxxx
学 号: xxxxx
指 导 教 师: xxxxxx
完 成 时 间: 20## 年 3 月 2 日
计算机科学与工程系
第二篇:德语演讲稿——机器人技术的变化 Presentation Vortrag—Robotertechnik
Robotertechnik
Die Geschichte der Robotik ist eng mit der Automobilindustrie verknüpft. Die Notwendigkeit der kostenoptimierten Fertigung von Automobilen für den Massenmarkt führte schon früh zu einer mechanisierten und automatisierten Fertigung. Die steigenden Anforderungen der Automobilkunden in Richtung Variantenflexibilitt und Qualitt Anfang der 70er Jahre führten zu einem erhhten Bedarf an Flexibilitt auch im Bereich der Fertigungstechnik. Dies war der Startschuss für den Einsatz der Robotertechnik.
Begriffsdefinition Roboter
Der Begriff Robotik wurde 1921 vom tschechischen Schriftsteller Karel Capek in seinem Roman Rossum’s Universal Robot“ geprgt und ist vom tschechischen Begriff für Frondienst Robota“ abgeleitet. In den darauf folgenden Jahren verbreitete sich der Begriff unter anderem auch durch die Science-Fiction Romane von Isaac Asimov, der auch durch seine Gesetze der Robotik die Grundlage des heutigen Roboterverstndnisses festigte. Die Bezeichnung Roboter wurde auf unterschiedlichste Maschinen angewandt. Insbesondere Maschinen, die menschenhnlich konstruiert sind, stehen im Mittelpunkt der Phantasie vieler Schriftsteller. Darüber hinaus werden Maschinen, die sich autonom bewegen und handeln, als Roboter bezeichnet. Innerhalb dieses Artikels soll eine Einschrnkung des Begriffs Roboter auf so genannte Industrieroboter stattfinden.
Die im Lauf der Zeit steigenden Anforderungen an humanere Arbeitspltze bei gleichzeitig steigenden Anforderungen an Automobile in Bezug auf Variantenflexibilitt, Qualitt und Kosten hatten neue Anforderungen an die Produktionstechnik zu Folge. So sollten die Anlagen für unterschiedliche Fahrzeugvarianten geeignet sein und die Arbeiter in Bereichen, in denen schwere krperliche Arbeit ntig war, unterstützen.
Die Grundlage für die Wiederprogrammierbarkeit von Anlagen wurde 1946 von G.C. Devol gelegt. Er entwickelte ein Steuergert zur magnetischen Aufzeichnung elektrischer Signale. Diese Signale konnten für die Steuerung mechanischer Gerte verwendet werden. Im Verlauf seiner Arbeiten meldete Devol auch mehrere Patente für roboterhnliche Maschinen an. Auf Basis dieser Erfindung wurde 1952 am Massachusetts Institute of Technology (MIT) der Prototyp einer NC-Maschine vorgestellt, die mit der extra dafür entwickelten Programmiersprache APT arbeitete. Im Jahr 1954 wurden sowohl in England als auch in Amerika Patente über die Entwicklung von Robotern eingereicht. Im Jahr 1959 wurde von der Fa. Planet Corporation der erste kommerzielle Roboter vorgestellt, der allerdings noch durch mechanische Kurvenscheiben gesteuert
wurde. Mit diesem Gert waren schon einfache Aufgaben, wie z.B. das Widerstandspunktschweien mglich.
1980er: Pionierzeit für Roboter
Durch die neuen Anforderungen aus dem Bereich der Produktionstechnik und den Trends, die aus den USA vorgegeben wurden, sahen sich auch Automobilfirmen in Deutschland dazu gezwungen, Anfang der 70er Jahre über eine hhere Automatisierung mit Hilfe von Robotern nach zu denken.
Die Aufgabenbereiche der Roboter erweiterten sich Schritt für Schritt, so dass Roboter nicht nur im Bereich Punktschweien und Handhabung eingesetzt wurden, sondern auch beim Beschichten, in der Montage und beim Bahnschweien (MINHFER 1981, HOFMANN 1986). Grundvorausset- zung für den Einsatz im Bereich Bahnschweien war die Weiterentwicklung der Steuerung von der Punkt-zu-Punkt Steuerung beim Punktschweien hin zur Bahnsteuerung (CP).