实 验 报 告
课程名称 控制工程基础
题 目 实验三 控制系统稳定性分析
工 具 _______matlab
系 别 _仪器科学与光电工程学院__
专 业 测控技术与仪器
姓 名 ______
班级/学号
成 绩
指导教师
实验三 控制系统稳定性分析
一、实验目的:
1) 学习并掌握Matlab控制系统的简单使用方法
2) 掌握控制系统稳定性分析方法
3) 掌握放大环节(如比例调节器)、延迟环节对控制系统稳定性的影响
二、实验仪器系统:
安装有matlab的计算机
三、实验内容:
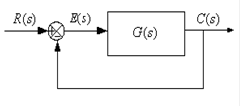
用Bode图分析下面系统中,调节器kc及延迟环节对系统稳定性的影响。(分析调节器kc时,延迟常数=0; 分析延迟常数时,调节器kc=10)
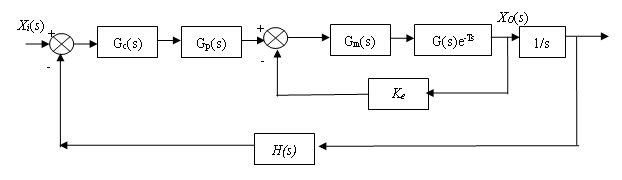
其中Gc(s)为调节器,Gc(s)=k;Gp(s)为功率放大器,Gp(s)=500;Gm(s)为电动机,其电阻r=10欧,电感L=0.1亨,电磁转矩系数Kt =0.01,反电势系数Ke=0.1;H(s)为检测传感器,H(s)=0.1伏/弧度/s;G(s)为被驱动机械对象,可以看成质量-刚度-阻尼系统,J=0.5;K=1;C=0.1; e-Ts为系统中的延迟,主要有材料等引起。
四、实验步骤:
1)写出系统开环传递函数;
2)打开matlab
3)建立***.m文件
4)编制程序
(主要指令: tf、bode、nyquist、margin、pade ; 注释用“%”开头,如: )
5) 运行所编制程序
6) 运行结果记录
7) 存储所编制程序
五、实验结果分析:
(1)分析调节器K,延迟常数=0
程序:
K=4; %K=4,8,12,20,200,500,1000
s1=tf([K],[1]);
s2=tf([500],[1]);
s3=tf([0.01],[0.1,10]);
s4=tf([1,0],[0.5,0.1,1]);
s5=tf([1],[1,0]);
s6=tf([0.1],[1]);
s7=tf([0.1],[1]);
s8=s3*s4;
s9=feedback(s8,0.1,-1);
s10=s1*s2*s9*s5*s7
nyquist(s10)
bode(s10)
K=4时伯德图:

K=4时传递函数:
2 s
--------------------------------------
0.05 s^4 + 5.01 s^3 + 1.101 s^2 + 10 s

实验结果分析:
由表中结果可知当K<=200时,系统稳定,当K值变得越来越大时,系统就变得不再稳定。
(2)分析延迟常数时,调节器K=100
程序:
T=0.1; %T=0.1,0.8,1,2,4,8,10,11
s1=tf([100],[1])
s2=tf([500],[1])
s3=tf([0.01],[0.1,10])
s4=tf([1,0],[0.5,0.1,1])
s5=tf([1],[1,0])
s6=tf([0.1],[1])
s7=tf([0.1],[1])
[num,den]=pade(T,10)
s0=tf(num,den)
s8=s3*s4 *s0
s9=feedback(s8,0.1,-1)
s10=s1*s2*s9*s5*s7
nyquist(s10)
bode(s10)
T=0.1时伯德图:

T=0.1时系统的传递函数:
(50 s^11 - 55000 s^10 + 2.97e007 s^9 - 1.03e010 s^8 + 2.523e012 s^7 - 4.541e014 s^6 + 6.054e016 s^5 - 5.881e018 s^4 + 3.97e020 s^3 - 1.676e022 s^2 + 3.352e023 s )/ (0.05 s^14 + 60.01 s^13 + 3.521e004 s^12 + 1.327e007 s^11 + 3.555e009 s^10 + 7.07e011 s^9 + 1.061e014 s^8 + 1.196e016 s^7 + 9.877e017 s^6 + 5.668e019 s^5 + 2.025e021 s^4 + 3.404e022 s^3 + 1.073e022 s^2 + 6.704e022 s)

六、实验结果分析:
分析实验结果图可知,当幅值裕量和相位裕量都大于0时,系统稳定,其中有一个不为正时,系统便不稳定。
七、思考题:
1. 开环传递函数中的比例对系统稳定性有何影响?
答:系统稳定性变得不好。
2. 开环传递函数中的比例对系统快速性有何影响?
答:系统快速性变好。
3. 开环传递函数中的延迟环节对系统快速性有何影响?
答:系统的快速性无规律,变得不好
4. 开环传递函数中的延迟环节对系统稳定性有何影响?
答:系统的稳定性无规律,变得不好。
第二篇:实验二:系统稳定性和稳态性能分析
实验二:系统稳定性和稳态性能分析
主要内容:
自动控制系统稳定性和稳态性能分析上机实验
目的与要求:
熟悉 MATLAB 软件对系统稳定性分析的基本命令语句 熟悉 MATLAB 软件对系统误差分析的 Simuink 仿真 通过编程或 Simuink 仿真完成系统稳定性和稳态性能分析
一实验目的
1、研究高阶系统的稳定性,验证稳定判据的正确性;
2、了解系统增益变化对系统稳定性的影响;
3、观察系统结构和稳态误差之间的关系。
二实验任务
1、稳定性分析
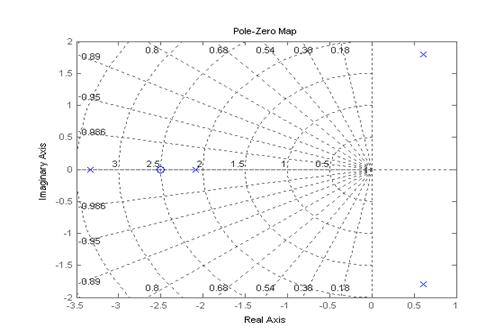
欲判断系统的稳定性,只要求出系统的闭环极点即可,而系统的闭环极点就是闭环传递函数的分母多项式的根,可以利用MATLAB中的tf2zp函数求出系统的零极点,或者利用root函数求分母多项式的根来确定系统的闭环极点,从而判断系统的稳定性。
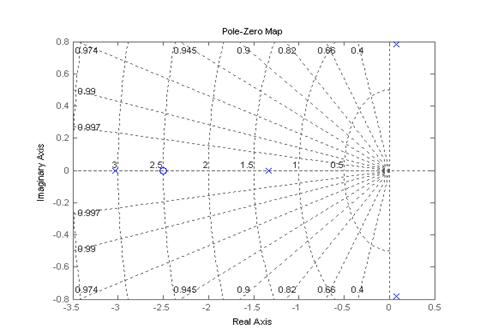
(1)已知单位负反馈控制系统的开环传递函数为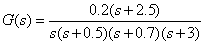 ,用 MATLAB 编写程序来判断闭环系统的稳定性,并绘制闭环系统的零极点图。
,用 MATLAB 编写程序来判断闭环系统的稳定性,并绘制闭环系统的零极点图。
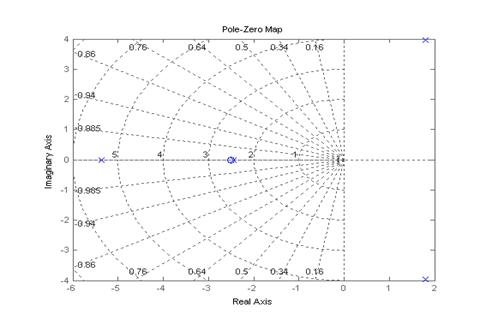
(2)已知单位负反馈控制系统的开环传递函数为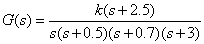 ,当取k=1,10,100用MATLAB编写程序来判断闭环系统的稳定性。
,当取k=1,10,100用MATLAB编写程序来判断闭环系统的稳定性。
只要将(1)代码中的k值变为1,10,100,即可得到系统的闭环极点,从而判断系统的稳定性,并讨论系统增益k变化对系统稳定性的影响。
2、稳态误差分析
(1)已知如图所示的控制系统。其中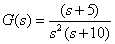 ,试计算当输入为单位阶跃信号、单位斜坡信号和单位加速度信号时的稳态误差。
,试计算当输入为单位阶跃信号、单位斜坡信号和单位加速度信号时的稳态误差。
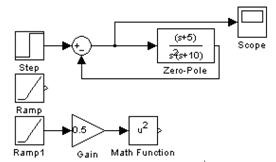
从 Simulink 图形库浏览器中拖曳Sum(求和模块)、Pole-Zero(零极点)模块、Scope(示波器)模块到仿真操作画面,连接成仿真框图如右上图所示:
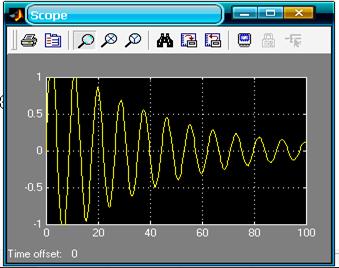
(2)若将系统变为I型系统, ,在阶跃输入、斜坡输入和加速度信号输入作用下,通过仿真来分析系统的稳态误差。
,在阶跃输入、斜坡输入和加速度信号输入作用下,通过仿真来分析系统的稳态误差。
三实验数据
1.(1)
>> [z1,p1,k1]=zpkdata(Go,'v')
z1 =-2.5000
p1 =-3.0058
-0.0971 + 0.3961i
-0.0971 - 0.3961i
-1.0000
k1 = 0.2000

1.(2)
K=1
K=10
K=100
2.(1)Ⅱ行系统。
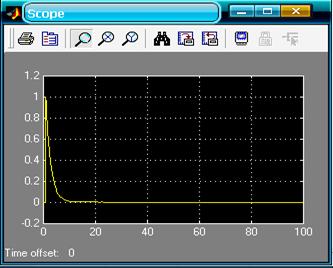
单位阶跃:
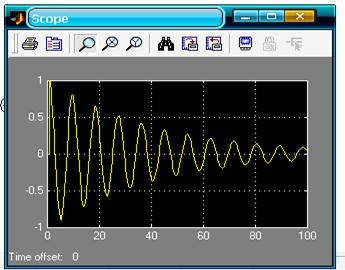 稳态误差=0
稳态误差=0
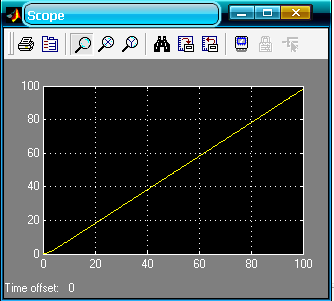
单位斜坡:
 稳态误差=0
稳态误差=0
单位加速度:
 稳态误差=1
稳态误差=1
2.(2)Ⅰ型系统。
单位阶跃:
 稳态误差=0
稳态误差=0
单位斜坡:
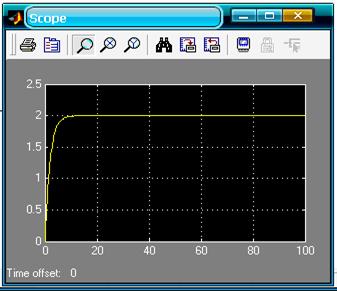 稳态误差=2
稳态误差=2
单位加速度:
 稳态误差=∞
稳态误差=∞
四实验结论
1.当系统的闭环极点的实部均为负数时,系统是稳定的,此时对应极点分布在s平面的左半部分。系统的稳定性与增益的大小有关,增益增大超过一定范围,则系统会由稳定变为不稳定,增益越大。
2.对于Ⅰ型系统,单位阶跃信号的误差为0,单位斜坡信号的误差为稳态速度误差系数的倒数,单位加速度信号的误差为无穷大。对于Ⅱ型系统,单位阶跃、单位斜坡信号的误差均为0,单位加速度信号的误差为稳态加速度误差系数的倒数。也可见,系统型别越高,对所加输入信号的要求越低。