原子力显微镜实验室 矿业科学中心A104室
1、 样品要求,对于泥岩页岩,要求用块状的样品,规格1cm3就行;表面要非
常平整光滑,最大起伏不超过10um;地面最好是平整的。
2、
3、
4、
5、 观测最大尺度:纳米级的空隙裂隙才能观测,微米及以上无法观测。 使用人数不多,所以不需要排队,提前一两天网上预约就行。 价格:250元/样。 样品制备:老师说对于样品的要求很严格,表面要尽可能平滑,起伏小于
10个微米。提供了两种参考制备方法:首先是用机器,采用超薄切片技术切割(老师说可以采用,但不知道哪里有这种仪器,对切割技术要求很高);然后是手工磨片,将粗切割磨平后的样品,再用不大于10微米的纱纸仔细磨平,在一般光学镜下检查表面很平整后再拿到实验室。
6、 最后,那个老师说如果需要测量页岩的空隙结构信息,一般的在扫描电子
显微镜下(最小尺度:2微米,可测量百纳米级的空隙)都是可查的,很少用到原子力显微镜的。
第二篇:原子力显微镜 实验报告
原子力显微镜
摘 要:本文阐述了原子力显微镜的结构、原理及应用,观察了样品的表面形貌,最后对本实验进行了讨论。
关键词:原子力显微镜,导电ITO,表面粗糙度
1. 引言
在当今的科学技术中,如何观察、测量、分析尺寸小于可见光波长的物体,是一个重要的研究方向。 扫描隧道显微镜(STM) 使人们首次能够真正实时地观察到单个原子在物体表面的排列方式和与表面电子行为有关的物理、化学性质。 STM要求样品表面能够导电,从而使得STM只能直接观察导体和半导体的表面结构。为了克服STM 的不足之处,推出了原子力显微镜(AFM)。AFM是通过探针与被测样品之间微弱的相互作用力(原子力) 来获得物质表面形貌的信息。因此,AFM除导电样品外,还能够观测非导电样品的表面结构,且不需要用导电薄膜覆盖,其应用领域将更为广阔。
2. 原子力显微镜结构及工作原理
在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统,如图1所示。
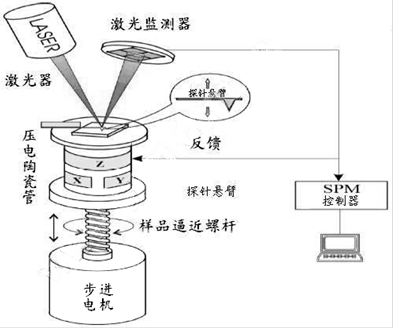
图1
(1)力检测部分
在原子力显微镜系统中,所要检测的力是原子与原子之间的范德华力。使用微悬臂来检测原子之间力的变化量。如图2所示,微悬臂通常由一个一般100~500μm长和大约500nm~5μm厚的硅片或氮化硅片制成。微悬臂顶端有一个尖锐针尖,用来检测样品-针尖间的相互作用力。
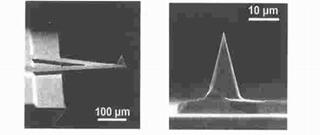
图2
(2)位置检测部分
在原子力显微镜系统中,当针尖与样品之间有了作用之后,会使得悬臂摆动,所以当激光照射在微悬臂的末端时,其反射光的位置也会因为悬臂摆动而有所改变,这就造成偏移量的产生。在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作信号处理。聚焦到微悬臂上面的激光反射到激光位置检测器,通过对落在检测器四个象限的光强进行计算,可以得到由于表面形貌引起的微悬臂形变量大小,从而得到样品表面的不同信息。
(3)反馈系统
在原子力显微镜系统中,将信号经由激光检测器取入之后,在反馈系统中会将此信号当作反馈信号,作为内部的调整信号,并驱使通常由压电陶瓷制作的扫描器做适当的移动,以保持样品与针尖保持一定的作用力。
原子力显微镜便是结合以上三个部分来将样品的表面特性呈现出来的:在原子力显微镜系统中,使用微小悬臂来感测针尖与样品之间的相互作用,这作用力会使微悬臂摆动,再利用激光将光照射在悬臂的末端,当摆动形成时,会使反射光的位置改变而造成偏移量,此时激光检测器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整,最后再将样品的表面特性以影像的方式给呈现出来。
3. 原子力显微镜的工作模式
根据探针与样品之间距离的不同,原子力显微镜有可分为三种工作方式。即:接触式,非接触式和轻敲式。
本实验采用接触模式:样品扫描时,针尖始终同样品“接触”,即针尖-样品距离在小于零点几个纳米的斥力区域。此模式通常产生稳定、高分辨图像。当沿着样品扫描时,由于表面的高低起伏使得针尖-样品距离发生变化,引起它们之间作用力的变化,从而使悬臂形变发生改变。当激光束照射到微悬臂的背面,再反射到位置灵敏的光电检测器时,检测器不同象限会接收到同悬臂形变量成一定的比例关系的激光强度差值。反馈回路根据检测器的信号与预置值的差值,不断调整针尖一样品距离,并且保持针尖一样品作用力不变,就可以得到表面形貌像。这种测量模式称为恒力模式。当已知样品表面非常平滑时,可以让针尖一样品距离保持恒定,这时针尖一样品作用力大小直接反映了表面的高低,这种方法称恒高模式。本实验采用恒力模式。
4. 原子力显微镜的操作步骤
(1)依次开启:电脑-控制机箱-高压电源-激光器。
(2)用粗调旋钮将样品逼近微探针至两者间距<1 mm。
(3)再用细调旋钮使样品逼近微探针:顺时针旋细调旋钮,直至光斑突然向PSD移动。
(4)缓慢地逆时针调节细调旋钮并观察机箱上反馈读数:Z反馈信号约稳定在-150至 -250之间(不单调增减即可),就可以开始扫描样品。
(5)读数基本稳定后,打开扫描软件,开始扫描。
(6)扫描完毕后,逆时针转动细调旋钮退样品,细调要退到底。再逆时针转动粗调旋钮退样品,直至下方平台伸出1厘米左右。
(7)实验完毕,依次关闭:激光器-高压电源-控制机箱
(8)处理图像,得到粗糙度
5. 导电ITO样品的表面形貌
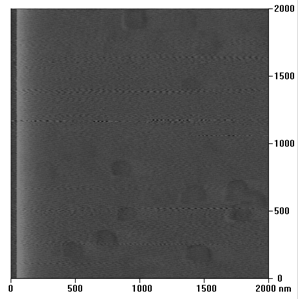
透明导电氧化铟薄膜(Indium tin oxide,ITO)的测量结果如下:
粗糙度 Ra: 3.2 nm ; Ry: 60.5 nm ; Rz: 60.5 nm
扫描范围 X: 20## nm ; Y: 20## nm
图像大小 X: 400 pixel ; Y: 400 pixel
二维表面形貌:
三维表面形貌:

上图中每个象素代表25nm2。下改变扫描范围为X: 400 nm ; Y: 400 nm,则每个象素代表1nm2。获得更精细的表面形貌如下图所示。
扫描范围 X: 400 nm ; Y: 400 nm
图像大小 X: 400 pixel ; Y: 400 pixel
二维表面形貌:

三维表面形貌:

6. 对实验的讨论
(1)AFM探测到的原子力的由哪两种主要成分组成?
一种是吸引力即范德瓦耳斯力;另外一种是电子云重叠而引起的排斥相互作用。
(2)原子力显微镜有哪些应用?
原子力显微镜可以用于研究金属和半导体的表面形貌、表面重构、表面电子态及动态过程,超导体表面结构和电子态层状材料中的电荷密度等。
另外原子力显微镜在摩擦学中的有许多应用,如纳米摩擦、纳米润滑、纳米磨损、纳米摩擦化学反应和机电纳米表面加工等。
(3)与传统的光学显微镜、电子显微镜相比,扫描探针显微镜的分辨本领主要受什么因素限制?
传统的光学显微镜和电子显微镜存在衍射极限,即只能分辨光波长或电子波长以上线度的结构。而扫描探针显微镜的分辨本领主要取决于:探针针尖的尺寸;微悬臂的弹性系数,弹性系数越低,AFM越灵敏;悬臂的长度和激光光线的长度之比;探测器PSD对光斑位置的灵敏度。此外,从上面的测量结果可以看出,对于分辨率一定的图像,扫描范围越小,获得的表面形貌越精细。
(4)要对悬臂的弯曲量进行精确测量,除了在AFM中使用光杠杆这个方法外,还有哪些方法可以达到相同数量级的测量精度?
可采用电学方法:
隧道电流法根据隧道电流对电极间距离非常敏感的原理,将SIM用的针尖置于微悬臂的背面作为探测器,通过针尖与微悬臂间产生的隧道电流的变化就可以检测由于原子间相互作用力令微悬臂产生的形变。
电容法通过测量微悬臂与一参考电极间的电容变化来检测微悬臂产生的形变。
7. 参考文献
黄润生等.近代物理实验(第二版).南京大学出版社.2008.4