调研报告
一、本课题的来源及意义
本课题研究的是直角坐标电力控制机械手升降、伸缩部分的设计。机械手是机器人的一个重要组成部分,它是随着机器人技术和传感器技术的不断成熟而不断发展的。而机器人在现代生产中应用日益广泛,作用越来越重要,工业机械手尤其如此,因此设计实用高效的机械手对于机械设计者来说是个富有意义和挑战的课题。
通常机械手由多自由度机械臂和末端夹持器组成。机械手通过多自由度机械臂的姿态调整和末端夹持器的动作完成操作任务。球坐标机械手突出特点是具有较强的机动性、灵活性,机构承载能力强,具有较好的通用性,重复定位精度高,动作速度快,能够成功的应用于包装、上下料以及工业生产等广泛领域;而电力控制中步进电机可直接实现数字控制,控制结构简单,控制性能好,通常不需要反馈就能对位置和速度进行控制,位置误差不会累积;在机器人中,机械手起着连接和承受外力的作用,机械臂需要承受物料的重量和手部、手腕、手臂自身的重量,其结构、工作范围、灵活性以及抓重大小、定位精度等对机械手性能影响很大。综上所述,设计球坐标步进电机驱动的机械手是个很有意义的课题。
二、国内外发展状况
专用机械手经过几十年的发展,如今已进入以通用机械手为标志的年代。通用机械手的应用和发展又促进了智能机器人的研制。智能机器人涉及的知识内容不仅包括一般的机械、液压、气动等基础知识,而且还应用了一些电子技术、电视技术、通信技术、计算技术无线电控制、仿生学和假肢工艺等,因此它是一项综合性较强的新技术。目前国内外对发展这一新技术都很重视。几十年来,这项技术的研究和发展一直比较活跃,设计在不断修改,品种在不断增加,应用领域也在不断扩大。
早在20世纪40年代,随着原子能工业的发展,以出现了模拟关节式的第一代机械手。50~60年代即制成了传送和装卸工件的通用机械手和数控示教再现型机械手。这种机械手也称第二代机械手。
1968~1970年,又相继把通用机械手用于汽车车身的点焊和冲压生产自动线上,使第二代机械手这一新技术进入了应用阶段,70年代机械手可以说是处于技术发展阶段。
80年代以来,国际机械手的发展速度平均保持在25%~30%的年增长率(其中1986、1987、1993、1994年略低,无增长)。如此高的增长率有其深刻的社会背景。首先,60年代末70年代初,由于世界石油价格的冲击,国际竞争加剧,产品更新换代的速度也越来越快,致使30年代~50年代逐步建立起来的单一产品的大规模生产流水线上遇上了在改变产品品种是,原有的单一产品专用生产装置改变的困难(时间、投资、停产等)以及如何实现多品种、中小批量或混流生产的自动化难题。为此,“柔性生产”的概念及其试验性的设计就诞生了。这些因素都促进了机械手的高速发展。
我国机械手起步较晚,经过30多年的发展。我国机器手的研究,有了长足的发展,有的方面已达到了世界先进水平。但与先进的国家相比,还有很大距离,从总体上看,我国机器手的研究仍然任重道远。
三、本课题研究目标和内容
本文研究的直角坐标电液控制机械手升降伸缩部分的设计,包括机械结构方案的确定,电动机控制系统的确定(设计选型和校核),编制PLC梯形图,绘制I/O端子接线图,控制系统原理图,驱动电路原理图,升降及伸缩机构零件图和装配图。(任务量为3张零号图纸)
目标是希望通过本课题,能巩固和加强专业基本理论知识,理解机械手的功能、组成及工作原理,研究步进电机的性能,熟悉以PLC为核心的编程与控制装置应具备的基本功能,掌握整个机电一体会系统的设计思想和具体方法;同时训练专业基本技能,提高自己查阅资料,独立分析问题和解决问题的能力,为以后深造研究打下良好基础。
四、本课题研究的方法和手段
研究方法:主要是搜索相关文献,包括图书馆电子资源CNKI学术网络总库,Springer link电子期刊,专业图书上课笔记,以及机器人等期刊,网上的豆丁网以及百度文库中的许多论文和专利;通过对已有产品的分析,对信息进行分类和整理,作为依据,确定在我的机械手设计中相应的参数,并对其进行改进和提高。
研究手段:首先是前期准备,收集相关资料,查阅中外文献,请教老师和同学;同时学习使用AutoCAD软件。然后进行机械手的总体设计包括机械手俯仰伸缩机械结构方案的确定,机械传动部分的结构,继而进行电力驱动部分选型和计算,分析工艺流程,绘制PLC的端子接线图和控制图,最后编写论文。努力在老师的指导下,定期完成工作任务。
五、本课题可行性分析和已具备的实验条件
已具备的条件:
我国的机器人研究始于70年代。经过近20年努力,特别是经过“七11.”攻关、“ 863”计划,取得了一批重要成果,已经系统掌握了机器人控制系统硬件设计、软件设计、机器人语言等技术。就全国来说,目前我国机器人研究开发工作做得较好的地区是:以中科院沈阳自动化研究所为首的东北地区机器人工程中心,以机电部广州机床所为龙头的华南地区的机器人工程中心。而各工程中心_L作的侧重点又有所不同:东北地区以特种机器人、水下机器人开发为L,华北地区以喷漆Y1lt人、焊接机器人开发为主,华东地区以搬运机器人、装配机器人、移动机器人开发为主。
我国的高等院校,如长沙国防科技大学、上海交通大学、北京航空航天大学、哈尔滨工业大学等在步行机器人、精密装配机器人及7自由度机器人研制等前沿领域内也做出了可喜的成绩,有了相当的基础。
通过调研,我知道直角坐标型机器人能够在空间中的任意两点距离中移动,所以能够抓取离地面较高,或者中间有障碍的工件,其位置精度高,位置误差与臂长成正比等。为了在X轴和Y轴的自由移动,可以滚珠丝杠与螺母相连接完成旋转便直线的运动,通过行星齿轮减速机可以使机器人运转更稳使控制更精确。通过交流伺服电机的闭环反馈能达到相当高的精度要求。
该机械手的基本技术参数如下:
水平横梁:3500mm,50mm/s
竖直大臂:1500mm,50mm/s
负载重量:200Kg;
驱动方式:交流伺服电机驱动
样式如图1-1
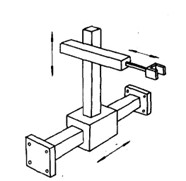
图1-1 直角坐标机械手
六、进度安排
第一周:获得设计题目,制定毕业设计进度计划;查阅相关资料;着手进行外文翻译。
第二周:通过实地调查研究和查阅相关资料,完成实习(调研)报告;完成外文翻译,并对其进行完善。
第三周:对机械手相关知识,软件进行学习和准备工作。
第四周:选定传动机构,确定机械手整体机械结构部分。
第五周:计算选定结构的参数和精度,并着手画AutoCAD图。
第六周:确定具体的细节结构,着手画装配图。
第七周:对相关的电机进行选型,查阅在实际中能买到的型号。
第八周:对机械部分进行计算校核。
第九周:PLC选型。
第十周:对机械手控制部分,分析动作顺利,画梯形图。
第十一周:对控制部分进行整理。
第十二周:编写设计计算说明书1份。
第十三周:整理毕业设计材料,对其进行完善、补充;准备毕业设计答辩。
第十四周:进行毕业设计答辩。
七、主要参考文献
[1] 胡玉睿.机械手原理[M].北京:中央广播电视大学出版社,2004
[2] 王承义.机械手及其应用[M].北京:机械工业出版社.1981
[3] 孙志礼等主编.机械设计[M].沈阳:东北大学出版社.2000
[4] 巩云鹏等主编.机械设计课程设计[M].沈阳:东北大学出版社.2000
[5] 蔡春源.机电液设计手册(上)[M].北京:机械工业出版社.1997
[6] 蔡春源.机电液设计手册(下)[M].北京:机械工业出版社.1997
[7] 赵松年.机电一体化系统设计[M].北京:机械工业出版社.2004
[8] 吴中俊 黄永红.可编程控制器原理及应用[M].北京:机械工业出版社.2004
[9] 喻子建等主编.机械设计习题与解题分析[M].沈阳:东北大学出版社.2000
[10]郝桐生.理论力学[M].北京:高等教育出版社.2003
[11] 吴玉香.S7-200PLC集成脉冲输出功能的应用[J].机电工程,2000,17(5):33-34
[12] 刘涛等.基于S7-200PLC的三维机械手控制设计[J].科技广场,2011.9:180-182
[13] 西门子.S7-200可编程序控制器系统手册.[M].2008.8
[14] 王丰等.利用可编程控制器实现步进电动机控制.[J]微机电,2008,41(9):87-89
[15] Yoshihiko Nomura ,Yuki Yagi , Tokuhiro Sugiura ,et al.A ?ngertip guiding manipulator for mental image creation of multi-stroke drawings[J].Microsyst Technol,2007,13:905-910
第二篇:20xx年工业机器人减速器调研报告
GRII发布《20xx年工业机器人减速器调研报告》
中国已成为全球第二大工业机器人应用市场,但高工机器人产业研究所(GRII)统计数据显示,20xx年中国工业机器人保有量仅有约13万台,制造业工业机器人密度为30台/万人,远低于全球的平均水平。中国制造业有4500万工人,工业机器人仍有庞大的替代空间。
GRII 认为,20xx年将是工业机器人元年,中国工业机器人将迎来爆发式的增长。预计中国未来十年内的工业机器人产值空间在3100亿元-6880亿元。减速器作为工业机器人的核心部件之一,以6轴机器人为例,减速器占成本比例的30%,随着工业机器人应用范围的不断扩大,机器人用减速器也将迎来快速的发展期。
全球机器人减速器市场几乎被Nabtesco、Harmonic、住友等企业垄断,但是随着中国机器人相关技术的不断成熟,国内企业开始逐渐切入机器人减速器的研发和生产,有望在不久的将来逐渐实现产业化,助力机器人国产化进程。
我们对主要减速器企业、工业机器人企业进行了实 地调查,结合对国内外机器人行业领军人物的面对面采访,收集了大量的第一手资料,为本报告的编写提供了坚实的基础依据。
在充分调查的基础上,高工机器人产业研究所(GRII)编制了《20xx年工业机器人减速器调研报告》。本报告对20xx年及未来几年,中国工业机器人行业的市场发展特点、主要产品市场份额、产量规模、各应用领域产品需求、市场发展趋势、行业发展环境等进行了详细的研究和分析。高工机器人希望通过切切实实地调查,深入研究分析,为企业、投资者、证券公司以及想了解机器人产业的人士,提供最准确最优参考价值的机器人行业数据及调查报告。
目录
一、全球工业机器人发展情况分析
1.工业机器人市场特点分析
2.工业机器人市场规模分析
3.工业机器人市场竞争分析
二、中国工业机器人市场特点分析
1.工业机器人市场特点分析
2.工业机器人市场规模分析
3.工业机器人市场竞争分析
1)工业机器人市场份额分析
2)重点企业在华竞争分析
a)ABB在华业务竞争分析
b)FANUC在华业务竞争分析
c)YASKAWA在华业务竞争分析 d)KUKA在华业务竞争分析
三、工业机器人减速器市场分析
1.减速器整体发展情况分析
2.机器人减速器市场特点分析
1)行业应用特点分析
2)行业竞争特点分析
3.工业机器人减速器价格情况分析
4.工业机器人减速器市场规模分析
1)工业机器人减速器销量分析
2)工业机器人减速器销售规模
5.工业机器人减速器市场竞争分析
1)工业机器人减速器市场份额分析
2)重点企业在华竞争分析
a)日本Nabtesco在华业务分析 b)日本Harmonic在华业务分析
四、国产工业机器人减速器发展分析
1.企业技术实力分析
2.投资情况分析
3.产能情况分析
4.企业分布情况
五、国产工业机器人减速器细分市场分析
1.RV减速器市场发展分析
1)RV减速器国内技术发展
2)RV减速器国内企业分析
2.谐波减速器市场发展分析
1)谐波减速器国内技术发展
2)谐波减速器国内企业分析
六、中国机器人企业减速器应用分析
1.沈阳新松机器人自动化股份有限公司
2.广州数控设备有限公司
3.安徽埃夫特智能装备有限公司
4.南京埃斯顿工业自动化有限公司
5.东莞市启帆工业机器人有限公司
6.上海沃迪自动化装备股份有限公司
七、中国工业机器人减速器发展环境分析
1.行业政策发展环境分析
1)国家政策及效果分析
2)地方政策及效果分析
3)行业政策发展趋势
2.行业经济发展环境分析
1)制造业人力成本分析
2)制造业从业人员分析
3)机器人投资回报分析
3.行业技术发展环境分析
八、中国工业机器人投资机会及建议
九、工业机器人减速器相关概念
1.工业机器人减速器定义及分类
2.工业机器人减速器产业链分析