电涡流传感器测量位移特性实验报告
一、实验目的:了解电涡流传感器测量位移的工作原理和特性。
二、基本原理:通过交变电流的线圈产生交变磁场,当金属体处在交变磁场时,根据电磁感应原理,金属体内产生电流,该电流在金属体内自行闭合,并呈旋涡状,故称为涡流。涡流的大小与金属导体的电阻率、导磁率、厚度、线圈激磁电流频率及线圈与金属体表面的距离x等参数有关。电涡流的产生必然要消耗一部分磁场能量,从而改变激磁线圈阻抗,涡流传感器就是基于这种涡流效应制成的。电涡流工作在非接触状态(线圈与金属体表面不接触),当线圈与金属体表面的距离x以外的所有参数一定时可以进行位移测量。
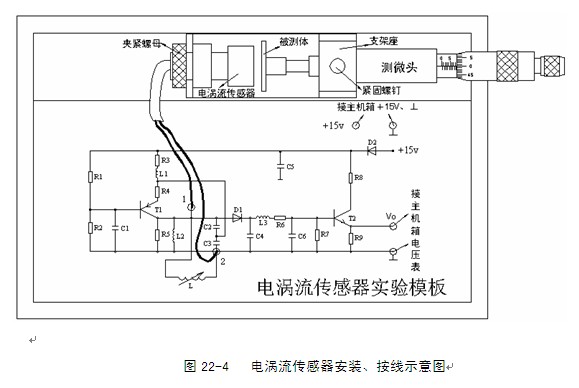
三、实训器材:主机箱、电涡流传感器实验模板、电涡流传感器、测微头、被测体(铁圆片)。
四、实训步骤:
1.观察传感器结构,这是一个平绕线圈。调节测微头的微分筒,使微分筒的0刻度值与轴套上的5mm刻度值对准。根据图22-4安装测微头、被测体、电涡流传感器(注意安装顺序:先将测微头的安装套插入安装架的安装孔内,再将被测体铁圆片套在测微头的测杆上;然后在支架上安装好电涡流传感器;最后平移测微头安装套使被测体与传感器端面想贴并拧紧测微头安装孔的紧固螺钉)
2.调节测微头使被测体与传感器端部接触,将电压表显示选择开关切换到20V挡,检查接线无误后开启主机箱电源开关,记下电压表读数,然后逆时针调节测微头微分筒,每隔0.1mm读一个数,直到输出几乎不变为止。将数据列入表22。
表22 电涡流传感器位移X与输出电压数据

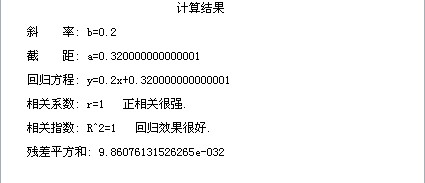
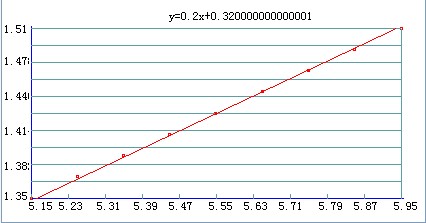
3.根据表22数据,画出V-X曲线,根据曲线找出线性较好的区域计算灵敏度和线性度(可以用最小二乘法或其他拟合直线)。实验完毕,关闭电源。
数据分析:
问题与讨论:
读取示数是眼睛应该与数字在同一水平线上,避免造成更大的额人为误差;
注意安装顺序:先将测微头的安装套插入安装架的安装孔内,再将被测体铁圆片套在测微头的测杆上;然后在支架上安装好电涡流传感器;最后平移测微头安装套使被测体与传感器端面想贴并拧紧测微头安装孔的紧固螺钉,每隔0.1mm读一个数,直到输出几乎不变为止
第二篇:采用电涡流传感器测量转子振动实验实验报告
采用电涡流传感器测量转子振动实验实验报告
一、 实验目的
了解电涡流传感器及其专用的前置放大器的使用方法,了解用电涡流传感器测量振动位移量的基本方法,了解旋转机械转子的运动轨迹和振动频谱特性的测量。
二、 实验内容
1、观察旋转机械子运动特点;
2、利用电涡流传感器测量转子旋转时的振动位移量;
3、利用示波器测量转子运动轨迹和频谱,得到信号的数值结果于事后分析。
三、实验装置及测试原理
电涡流传感器是一种非接触式测量的位移传感器。它具有较宽的使用频率范围(DC~1.0kHz),因此特别适合于测量转子轴的振动、静偏摆、油膜厚度、轴心轨迹等机械量,也可用于其他对象的静态和动态位移的测量。
旋转机械大量应用于工业和科研领域中。旋转部件(转子)旋转时,由于转子本身存在失衡量(即转子的质心和形心不一致),从而产生离心力使转子产生振动。这种振动的频率有与转子的转速相同的部分,
也有不同的部分,可以通过频谱分析得到其特性。转子旋转的运动轨迹可以通过正交两个位移传感器测量到的振动量合成得到。
实验所用的装置、仪器及接线如图1所示。
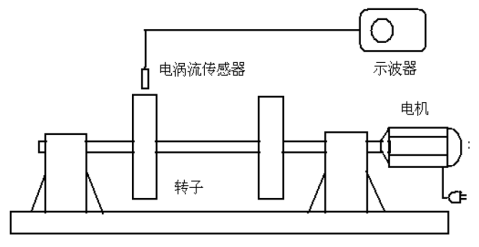
图1、利用电涡流传感器测量转子振动装置图
四、实验步骤
1、检查接线,特别注意 传感器电源压的极性, 安装位置,电机源连接等。
2、启动电机,观察转子运情况。
3、采用示波器测量转子运动轨迹,振频谱特性。
4、输出振动测量数据用于事后分析。
五、实验结果及分析
我们组进行了三组实验,每组得到了三个点的有效数据,将数据和图像列于下。 第一组:转子转速100r/s时:
表1、转速100r/s时测量数据

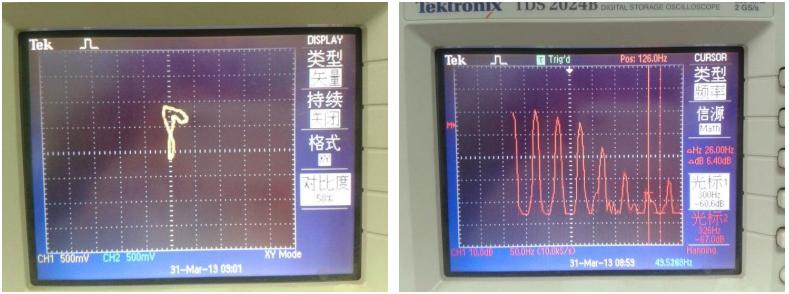
图2、转速100r/s时李萨如图形及频谱
第二组:转子转速50r/s时:
表2、转速50r/s时测量数据

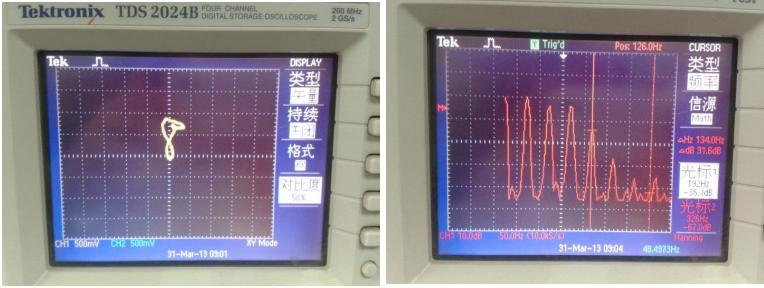
图3、转速50r/s时李萨如图形及频谱
第三组:转子转速30r/s时:
表3、转速30r/s时测量数据

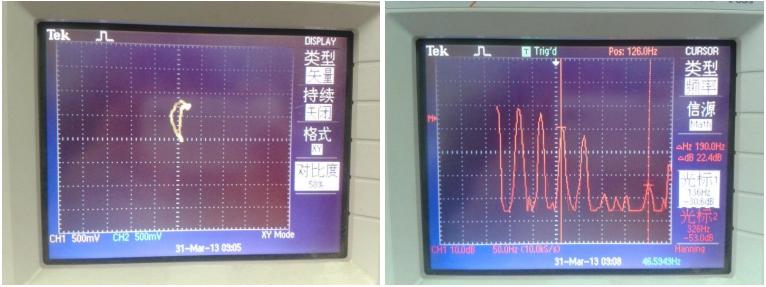
图4、转速30r/s时李萨如图形及频谱
由以上图表可以看出,当转速减小的时候,李萨如图形渐渐变化,趋势是简单化、椭圆化。而频率谱形状变化不大,但峰的位置发生了明显的变化,幅度也有不同。总体来看,当转速较大的时候,峰的频率正是转子转速的整数倍,而转速较小的时候,峰的频率往往与转速整数倍有偏移,转速越小,偏移越大。这是由于系统的基频是由转子与基座共同决定的,当转速较小时,转子在系统中造成的影响也相对较小,故而偏移较大。
六、思考题:两个电涡流传感器实验中并不是正交的,应如何将其测得的数据换算成正交情况下的数据?
由于各个方向上的振动可以分解为两个正交方向上振动的矢量叠加,故而可以将其中一个传感器设为基础矢量,另一个传感器的信号分解为该基础矢量和垂直其的矢量的和,转化为正交的数据。