嵌入式系统设计实验报告
班 级: 20100611
学 号: 2010061124
姓 名: 尤 越
成 绩:
指导教师: 刘书勇、武俊鹏
1. 实验一
1.1 实验名称
博创UP-3000实验台基本结构及使用方法
1.2 实验目的
1.熟悉 ADS1.2 开发环境和UP-net3000实验平台,并掌握ARM JTAG的安装与使用和ARM 并行口仿真器的使用方法。
2.学会使用 SDT 编译程序,并下载、调试相应的程序,并使用超级终端跟踪程序的运行状态。
3.了解嵌入式开发的基本流程和思想。
1.3 实验环境
硬件:ARM嵌入式开发平台、用于 ARM7TDMI的JTAG 仿真器、PC机(Pentium100 以
上)。
软件:win98、Win2000 或WinXP 操作系统环境、ARM SDT 2.51或ADS1.2集成开发环境、 超级终端程序、仿真器驱动程序。
1.4 实验内容及要求
1.本次实验通过使用ADS 集成开发环境,来新建一个简单的工程文件,并编译这个工程文件。
2.学习ARM 仿真器的使用和开发环境的设置。将已经编译好的文件下载到嵌入式控制器中运行、调试,并观察实验结果。
3.学会如何在程序中设置断点,并对系统内存和变量进行观察,为应用程序的调试打下一定基础。
1.5 实验设计与实验步骤
(1)运行ADS1.2 集成开发环境(CodeWarrior for ARM Developer Suite)。选择File|
New…菜单,在对话框中选择Project,然后新建一个工程文件(44B0 ARM Executable Image 是专为本嵌入式开发板设置的工程模板,在此也可选择ARM Executable Image 通用模板)。
(2)在新建的工程中,选择Debug 版本,使用Edit | Debug Settings菜单对Debug 版本进行参数设置。
(3)在Debug Settings 对话框中选择Target Settings 项,然后在Post-linker一栏中选择ARM fromELF。在Debug Settings 对话框中选择ARM Linker 项,在Output 选项卡的Simple image 框中设置连接的Read-Only(只读)和Read-Write(读写)地址。地址0x0c080000是开发板上SDRAM 的真实地址,是由系统的硬件决定的;0x0c200000 指的是系统可读写的内存地址。针对44B0 开发板,把程序的入口定位在0xc080000,并定义scatter 文件为scat_ram.scf ,选择LinkType 为Scattered, 输入scatter 文件名scat_ram.scf;然后切换到Options 选项卡在Image Entry Point 框中输入0xc080000。
(5)在第(4)步中如果不选择简单的连接地址设置,则需设置C 编译器。在Debug Settings 对话框中选择ARM C Compiler 项,在ATPCS 选项卡中选择ARM/Thump interwork,或者在命令行中添加-apcs /interwork。
(6)在第四步中如果选择简单的地址连接设置,在Debug Settings 对话框中选择ARM
Linker 项,如图1B-9。在Layout 选项卡的Place at beginning of image 框中设置程序的入口模块。指定在生成的代码中,程序是从44binit.s 开始运行的。Object 设为44binit.o,section 设为init。
(7)在Debug Settings 对话框中选择ARM fromELF 项,在Output file name框中设置输出文件名为system.bin,即:要下载到开发板的嵌入式应用程序文件。
(8)回到工程窗口中,选择Release 版本,使用Edit | Release Settings菜单对Release 版本进行参数设置,具体操作与以上(3)-(7)步在Release Settings 对话框中设置Release版本的Post-linker、连接地址范围、入口模块和输出文件。
(9)回到工程窗口中,选择Targets 选项卡,选中DebugRel 版本,按Del 键将其删除。
(10)设置完成后,可以将该新建的空工程文件作为模板保存以便以后使用。将工程文
件名改为44B0 ARM Executable.mcp。然后在ADS1.2 软件安装目录下的Stationery 目录下新
建名为44B0 ARM Executable Image 的模板目录,再将刚设置完的44B0 ARM Executable.mcp
工程模板文件存放到该目录下即可。
(11)双击Main.c 打开该文件,同时可以根据喜好在Edit 菜单下的Preferences窗口中进行设置,使文本按语法分颜色显示。
(12)运行Windows 系统下的超级终端(HyperTerminal)应用程序,新建一个通信终端,并为所建超级终端取名为arm,可以为其选一个图标,单击“确定”按钮;在接下来的对话框中选择ARM 开发平台实际连接的PC 机串口,按确定后出现属性对话框,并设置通信的格式和协议,这里波特率为115200,数据位8,无奇偶校验,停止位1,无数据流控制,按确定完成设置;完成设置后,选择超级终端文件菜单中的保存,将当前设置保存为一个特定超级终端到桌面上,以备后用,启动开发板,按住开发板上键盘的任意按键,使开发板进入BIOS 设置状态;按PC 机键盘相应键将执行对应功能(注意:操作时保持超级终端处于激活状态,并且PC 机键盘必须为小写);按超级终端的提示尝试部分测试功能;按PC 键盘的u 键(要使超级终端处于活动状态),在“我的电脑”中可以发现多了一个“可移动磁盘”,这就是开发板的海量存储器16M 非线性Flash。
(13)进行程序的在线仿真、调试。
1)工程窗口选中Debug 版本,执行菜单Project | Make 对工程进行编译连接;
2)在ADS 中执行菜单Project | Debug 启动ADS1.2 的调试工具AXD;
3)再在AXD 中执行菜单Options | Configure Target 对AXD 进行设置,选择AD
即远程调试,点Configure 按钮进一步设置具体参数;
4)点Select 按钮选择远程连接为ARM ethernet driver,点Configure 按钮输入仿真器的IP 地址(如果用户使用的是并行口仿真器,请输入127.0.0.1 即可)。
5)等待程序装载完毕以后,通过Execute | Go 菜单以及Execute | Stop(或者工具栏中的相应按钮)运行或暂停程序。
6)通过Execute | Step 菜单(或者工具栏中的相应按钮)可以单步运行程序。
7)程序停止后可以通过Processor Views | Sources 菜单查看源文件,并可在适当位置按F9 设置端点。
8)使用在Processor View 菜单下的Registers、Variables 和Memory 命令可以查看工作寄存器或者内存变量。
1.6 实验过程与分析
本次试验主要按照实验步骤来行操作,熟悉嵌入式的开发环境和平台,是对实验的进行验证,因而所得到结果都与指导书一样,由于是初步接触此开发平台,对其操作还是会有些生疏,但还是基本上按照实验的要求完成了实验。
1.7 实验结果总结
通过在集成开发环境和是在ARM实验台调试运行下,实验在超级终端和的实验台上LCD屏幕上都显示 出了Hello world !结果,其与预期结果一致,验证了预期结果。
1.8 心得体会
通过本次实验,我了解了嵌入式系统开发的基本流程,知道了怎样通过操作系统自带的通讯软件超级终端来检验各个外设的工作状态。第一次实验没有难度,轻松加愉快地完成了,通过了检验,方便了以后实验可以正常进行。
2. 实验二
2.1 实验名称
ARM 的串行口实验
2.2 实验目的
1.掌握ARM 的串行口工作原理。
2.学习编程实现ARM 的UART 通讯。
3.掌握CPU 利用串口通讯的方法。
2.3 实验环境
硬件:ARM 嵌入式开发平台、用于 ARM7TDMI 的JTAG 仿真器、PC 机 Pentium100 以上、串口线。
软件:PC 机操作系统 win98 、Win2000 或 WinXP 、ARM SDT 2.51 或 ADS1.2 集成开发 环境、仿真器驱动程序、超级终端通讯程序。
2.4 实验内容及要求
学习串行通讯原理,了解串行通讯控制器,阅读 ARM 芯片文档,掌握 ARM的UART相关寄存器的功能,熟悉 ARM 系统硬件的 UART 相关接口。编程实现 ARM 和计算机实现
串行通讯:
ARM 监视串行口,将接收到的字符再发送给串口(计算机与开发板是通过超级终端通 讯的),即按 PC 键盘通过超级终端发送数据,开发板将接收到的数据再返送给 PC ,在超级 终端上显示。
2.5 实验设计与实验步骤
1.新建工程,将“Exp2 ARM串口实验”中的文件添加到工程中,这些是启动时所需要的文件。
2.定义与 UART有关的各个寄存器地址和一些特殊的位命令。
3.编写串口驱动函数(MyUart.c )。

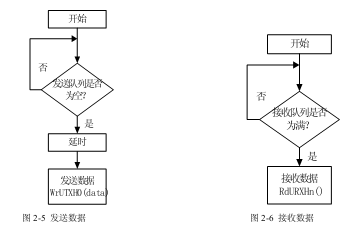
4.在主函数中实现将从串口0 接收到数据发送到串口0(Main.c )。
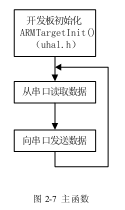
2.6 实验过程与分析
按照实验步骤一步一步进行操作,没有出现错误,每一步的结果都与指导书一样,最终能够实现电脑键盘输入在超级终端显示的功能。
2.7 实验结果总结
实验最终结果是根据ASCII码进行输出,键盘输入后扫描ASCII码后在超级终端显示该键盘输入的情况,并且可以根据喜好对输出结果进行修改,如输入1显示2,则是让ASCII码加1后输出。
2.8 心得体会
通过本次实验,我掌握了串行通讯原理、并且了解了串行通讯控制器、熟悉ARM 系统硬件的UART 相关接口。最重要的是,我明白了ADS1.2软件开发环境的使用方法,这为我今后的实验打下了坚定的基础。
3. 实验三
3.1 实验名称
键盘控制方法及LED驱动设计
3.2 实验目的
1.熟悉ZLG7289芯片的内部结构并学习键盘及LED 驱动原理。
2.掌握用ZLG7289驱动键盘和LED的方法。
3. 掌握ARM汇编语言和C语言的编程方法。
4. 编写出一段程序,要求能在LED上显示出小键盘上按下的4位数字。
3.3 实验环境
硬件:ARM嵌入式开发平台、用于 ARM7TDMI的JTAG 仿真器、PC机(Pentium100 以
上)。
软件:win98、Win2000 或WinXP 操作系统环境、ARM SDT 2.51或ADS1.2集成开发环境、 超级终端程序、仿真器驱动程序。
3.4 实验内容及要求
在ARM嵌入式开发平台上,通过ZLG7289芯片驱动 17键的键盘和8个共阴极 LED ,将按键值在LED上显示出来。
3.5 实验设计与实验步骤
1.新建工程,将“Exp3 键盘及 LED 驱动实验”中的文件添加到工程。
2.定义ZLG7289 寄存器(ZLG7289.h ),由于是引用 ZLG7289.h 里的文件,其具体代码将不做介绍。
3.编写ZLG7289 驱动函数(ZLG7289.c )
根据要求驱动函数的具体复位和键值读取流程如下图1、2所示。
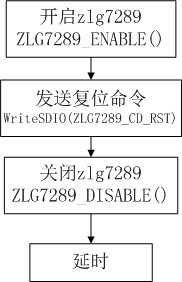
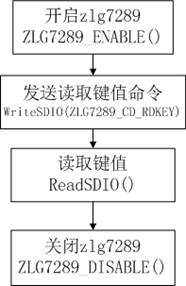
图1 复位流程 图2 读取键值的流程
4.定义键盘映射表:(Keyboard16.c )
键盘映射表为64键值映射表,其作用通过查找键盘映射表来确定键盘扫描码对应的按键值,具体的键值映射表如下。
Unsigned charKey Board_Map[]= {4,8,11,0,0,0,0,0,5,9,12,15,1,0,0,0,6,10,13,16,2,3,0,0,7,0,14,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
5.定义键值读取函数(Keyboard16.c )
键值读取函数的实现的流程图3所示。
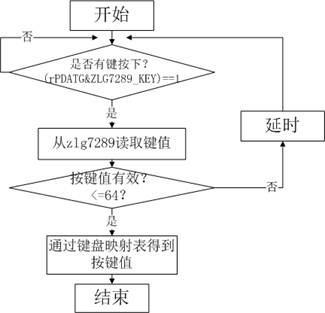
图3键值读取函数流程
6.编写主函数,将按键值在数码管上显示。
其主函数的运行流程图如图4所示。
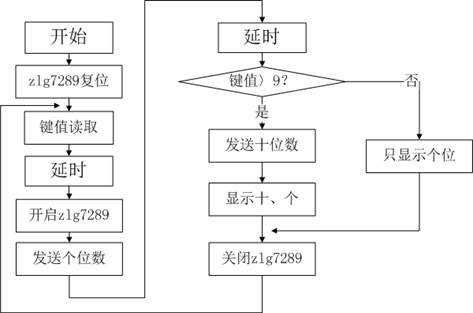
图4 主函数的运行流程图
3.6 实验过程与分析
按照实验步骤的要求,最终实现了在LED灯上完成了对两位数字显示,然后按照要求将其修改为四位的LED灯的显示,在原代码的基础上,我们修改并添加了部分代码,最终完成了四个LED灯显示的功能,在时间的允许下,尝试将其改为8位的LED灯显示,注意要对其存储的空间进行修改(即:将其值改成0xff),否则会得不到所要的结果。
3.7 实验结果总结
通过此次实验实现了LED灯的二位、四位、八位显示的功能,并且根据按键的每增加一位增加,LED灯显示的数值就依次左移一位,当数值超出了八位显示范围,LED灯只会显输入数据的后八位。
3.8 心得体会
通过此次实验,我了解了键盘及LED 驱动原理,并熟悉并掌握了ZLG7289芯片的内部结构以及驱动键盘和LED的方法,掌握了ARM汇编语言和C语言的编程方法,提高了在程序的调试中查找错误的能力,学会了在嵌入式开发平台上利用各参数来实现对程序的编写。
4. 实验四
4.1 实验名称
电机转动控制及中断实验
4.2 实验目的
1. 熟悉ARM自带的六路(三对)PWM。
2.了解直流电机和步进电机的工作原理。
3.熟悉ARM自带的A/D转换器的工作原理及编程方法。
4.学习S3C44B0上定时器中断应用方法。
5. 学习利用A/D转换器实现对直流电机和步进电机的控制,并且通过试验台上小键盘实现A/D转换器对两个电机控制的切换。
6.学习步进电机和直流电机的工作原理,了解实现两个电机转动对于系统的软件和硬件要求。
7.学习ARM 知识,掌握PWM 的生成方法,同时也要掌握I/O 的控制方法。
4.3 实验环境
硬件:ARM嵌入式开发平台、用于 ARM7TDMI的JTAG 仿真器、PC机(Pentium100 以
上)。
软件:win98、Win2000 或WinXP 操作系统环境、ARM SDT 2.51或ADS1.2集成开发环境、 超级终端程序、仿真器驱动程序。
4.4 实验内容及要求
1.利用A/D转换器实现对直流电机和步进电机的控制,通过A/D 旋钮控制其正反转及转速。
2.利用实验设备上自带的小键盘实现A/D转换器对两个电机控制的切换,并能通过A/D 旋钮转角控制步进电机的转角。
3.综合键盘、LED、A/D以及电机等外设,编写出单一的中断应用。
4.编写出多个不同优先级中断应用嵌套的应用系统。
4.5 实验设计与实验步骤
1.新建工程,将“Exp6 电机转动控制实验”中的文件添加到工程。
2.编写直流电机初始化数(MotorCtrl.c )。
直流电机的初始化流程如图5所示。

图5 初始化流程图
3.控制直流电机
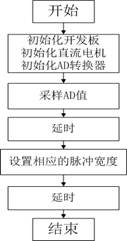
图6 直流机控制流程图
4.控制步进电机
步进机的控制流程如图6所示。
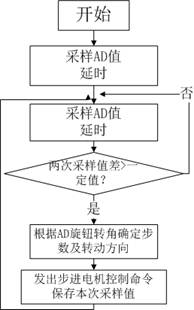
图6 步进机控制流程图
5.在LED灯上显示转速
在led灯上显示转速的流程如图7所示。

图6 显示转速的流程图
6. 设置键盘输入中断
if((rPDATG&ZLG7289_KEY))//有键按下
if(Zlg7289_ReadKey()<=64)
if((rUTRSTAT0 & 0x1)) //有输入,则跳出
{ Delay(10000);
*Revdata=RdURXH0();
goto next;
}
4.6 实验过程与分析
本实验按实验步骤一步一步操作可实现两个电动机的旋转,但是没有设置中断,所以我们首先是根据键盘输入设置中断,刚开始用getkey函数,但是此函数必须在实验台的健按下后才会执行下一步,所以不能用,所以改成判断有没有电脑键盘按下,有则跳出。然后把keyboard的相关文件拷贝过来,在设置显示电机的转速,实验完成。
4.7 实验结果总结
实验结果是开机后直流点击转动,LED灯显示其转速,并且可以通过A/D旋钮控制转速,LED灯显示实时转速,然后按下电脑键盘后异步电机转动,A/D旋钮控制转角,达到了预期的要求。
4.8 心得体会
经过本次实验,我了解了ARM自带的六路(三对)PWM和直流电机和步进电机的工作原理,熟悉了ARM自带的A/D转换器的工作原理及编程方法,学习了S3C44B0上定时器中断应用方法。而且这次实验让我懂得了如何把以前的实验和现在联系在一起并且相互调用,为综合实验做好准备。
5. 实验五
5.1 实验名称
LCD驱动及触摸屏实验
5.2 实验目的
1. 掌握LCD显示原理及显示驱动的嵌入式系统编程实现方法。
2. 学习基于ARM的LCD 显示驱动控制方法,通过对ARM 内置的LCD 控制器进行编程实现驱动LCD显示屏。
3. 学习触摸屏基本原理,理解触摸屏的输出标定以及与LCD 显示器配合的过程,编程对触摸屏进行控制。
4.学习触摸屏基本原理,理解对触摸屏进行输出标定、与LCD 显示器配合的过程。
5.3 实验环境
硬件:ARM嵌入式开发平台、用于 ARM7TDMI的JTAG 仿真器、PC机(Pentium100 以
上)。
软件:win98、Win2000 或WinXP 操作系统环境、ARM SDT 2.51或ADS1.2集成开发环境、 超级终端程序、仿真器驱动程序。
5.4 实验内容及要求
1. 点击触摸屏上两点后,两点之间画出一条直线
2. 点击触摸屏并在其上移动,显示移动轨迹。
5.5 实验设计与实验步骤
1.新建工程,将“Exp7LCD的驱动控制”中的文件添加到工程中。
2. 运行此工程,则在LED屏幕会显示彩色。
3. 新建工程,将“Exp8触摸屏驱动实验”中的文件添加到工程中。
4. 运行此工程,在触摸屏上点击或者划动,在超级终端会显示触摸屏上的操作,如click操作、move操作,而且会显示关键点的坐标。
5. 根据两个实验的结果,把两个实验的文件复制到一起,并且分析实验7的代码得知LCDBuffer[iy][ix]=0x0000d0e0是在哪个点显示哪种颜色。
6. 编写画线函数,可根据触摸的两点画线。
7. 编写点击显示函数,实现关键点的显示。
8. 最后把函数复制到相应的操作下来显示,则能实现画直线和画出触摸轨迹。
5.6 实验过程与分析
5.7 实验结果总结
实验结果是点击LCD屏幕的两点,会显示这两点并且两点间产生一条直线,如果是在屏幕上划动,则会显示划动的轨迹,完成了实验要求。
5.8 心得体会
经过本次实验,我掌握了LCD显示原理及显示驱动的嵌入式系统编程实现方法, 学习基于ARM的LCD 显示驱动控制方法,通过对ARM 内置的LCD 控制器进行编程实现驱动LCD显示屏,学习了触摸屏基本原理,理解了触摸屏的输出标定以及与LCD 显示器配合的过程,编程对触摸屏进行控制。而且加强了分析代码和编写代码的能力,为综合实验打下了良好的基础。
6. 实验六
6.1 实验名称
Ucos-II剪裁实验
6.2 实验目的
1. 掌握Ucos-II剪裁实现的基本原理和嵌入式编程实现方法。
2. 学习如何根据具体情况对μcos-II操作系统进行裁剪,从而得到即满足需要,又非常紧凑的应用软件系统。
6.3 实验环境
硬件:ARM 嵌入式开发平台、用于 ARM7TDMI 的JTAG 仿真器、PC 机 Pentium100 以上。
软件:PC 机操作系统 win98 、Win2000 或 WinXP 、ARM SDT 2.51 或 ADS1.2 集成开发环境、仿真器驱动程序、超级终端通讯程序。
6.4 实验内容及要求
1. 利用Ucos-II操作系统的相关配置文件对相关的参数进行配置,从而实现对Ucos-II操作系统的裁剪,并能生成对应的裁剪后的操作系统。
2. 给出裁剪的详细过程与裁剪结果说明,并生成裁剪后的操作系统文件。
6.5 实验设计与实验步骤
(1)新建一个工程,并将“Exp12Aucos的移植”文件拖入新建的工程当中。
(2)配置相关的文件中的数据,打开“OS_CFG.H”文件,修改其中的宏定义中EN值,将对应使用的功能置“1”,否则置“0”。
(3)对系统进行裁剪并编译。
(4)将其中的”SYSTEM.BIN”文件下载到实验台上,并验证试验的结果。
6.6 实验过程与分析
本次实验主要是裁剪系统。在os_cfg.h中有很多的常量定义,其中就包含了系统相关的一些配置信息,像OS_SCHED_LOCK_EN等等使能的常量也有很多。其中存在系统的参数以及系统的一些功能设定。比方说,在os_cfg.h有一个EN为后缀的宏定义,当其的值为0时,代表着系统不会放有次系统。
6.7 实验结果总结
从实验结果可以看出,成功的进行了Ucos-II的剪裁,并得到了裁剪后的系统。
6.8 心得体会
通过本次实验,我了解了Ucos-II的移植的全过程,对系统有了一个深入的了解。同时,我发现如果使用常量来编写程序的话,会很适合非本专业的人来进行修改,因为只要有个手册,稍微改改系统就会使得系统的效果不同了。
7. 实验七
7.1 实验名称
Ucos-II剪裁实验
7.2 实验目的
1.了解Ucos-II内核的主要结构,掌握ARM的C语言和汇编语言的编程方法;
2.了解ARM处理器结构,掌握将Ucos-II移植到ARM处理器上的基本原理与嵌入式编程的实现方法。
7.3 实验环境
硬件:ARM 嵌入式开发平台、用于 ARM7TDMI 的JTAG 仿真器、PC 机 Pentium100 以上。
软件:PC 机操作系统 win98 、Win2000 或 WinXP 、ARM SDT 2.51 或 ADS1.2 集成开发环境、仿真器驱动程序、超级终端通讯程序。
7.4 实验内容及要求
1.通过对将µC/OS-II 内核移植到ARM7 微处理器S3C44B0上。
2.编写两个简单任务,在超级终端上观察两个任务的切换。
7.5 实验设计与实验步骤
1.该实验的文件分为两类,其一是STARTUP 目录下的系统初始化、配置等文件,其二是uCOS-II 的全部源码,arch 目录下的3个文件是和处理器架构相关的;
2.设置os_cpu.h中与处理器和编译器相关的代码;
3.用C 语言编写6个操作系统相关的函数(OS_CPU_C.C);
4.用汇编语言编写4个与处理器相关的函数(OS_CPU.ASM);
5.编写一个简单的多任务程序来测试一下移植是否成功;
6.编译并下载移植后的uCOS-II。
7.6 实验过程与分析
最后编写了一个多任务的例子,包括两个任务同时启动,最后的结果是两个程序都可以交换式的显示数字。之后在每个程序中单独编写代码,发现每个代码中的运行的内容互不相同,同时互不干扰。那么这是不是代表着系统中可以添加锁这种概念来控制两个任务呢?
我最后实现了一个变量的锁控制,使得这个变量在一个任务运行时另一个任务无法更改。
7.7 实验结果总结
通过对将µC/OS-II 内核移植到ARM7 微处理器S3C44B0上。编写两个简单任务,在超级终端上观察两个任务的切换,同时完成了两个任务的任务锁。这代表两个程序的运行是相互独立的,移植uCOS-II是成功。
7.8 心得体会
通过本次试验,我了解了uCOS-II系统移植的全过程,并成功实现了。
8. 实验八
8.1 实验名称
各接口模块相互衔接综合实验
8.2 实验目的
回顾串口、键盘、LED接口、A/D、电机转动、定时器中断、LCD接口及触摸屏驱动控制等接口模块驱动设计及开发方法。
8.3 实验环境
硬件:ARM 嵌入式开发平台、用于 ARM7TDMI 的JTAG 仿真器、PC 机 Pentium100 以上。
软件:PC 机操作系统 win98 、Win2000 或 WinXP 、ARM SDT 2.51 或 ADS1.2 集成开发环境、仿真器驱动程序、超级终端通讯程序。
8.4 实验内容及要求
综合应用以上全部或者部分模块,实现一个嵌入式综合应用系统,要求至少用到8个模块中的5个。尽量使综合应用系统具备合理的功能。
8.5 实验设计与实验步骤
1.首先是实现电机实验和触摸屏实验的融合,把相关文件复制在一起之后,在主函数中把两个实验的函数分成两部分用if语句选择控制,编译通过后再执行下一步。
2. 再编译通过后,加上串口实验,在LCD屏幕显示要选择的功能,一是电机,二是画图,然后用getkey函数实现实验台的键盘操作,根据输入的不同,显示不同功能。
3. 在上述步骤都完成之后便可以完成了,但是不能循环操作,比如运行了画图功能之后没法在回到电机操作,所以我们又是根据电脑键盘是否有健按下来实现,不过这次是定义了一个数字“4”,键,只有按下4才会返回到主菜单,在进行选择,而电机之间的切换则是任一键按下则切换(屏蔽“4”键),最终完成了实验。
8.6 实验过程与分析
在实验开始,两个实验合并在一起时无法正常编译,因为有写参数在主函数中定义后有在其他库文件中定义,导致重复定义出错。然后就是像通过敲击实验台的键来实现返回到主目录,但是getkey函数必须有键按下才会执行下一步,但这样行不通而且不知道其他方法,所以改用电脑键盘的固定的一个键进行返回。而且老师让我们修改几个地方,如修改画线颜色、修改键盘输入选择等,我们都实现了,最后我们完成了综合实验。
8.7 实验结果总结
最终实验是结果首先是在LCD屏幕显示选择功能,并且按实验台的“1”则进入电机实验,则是显示转速和按电脑键盘切换电机等,然后按电脑键盘“4”返回主目录,按实验台的“2”进入画图模式。用到了7个功能。
8.8 心得体会
通过本次实验,我对各个接口模块的实验都有了更加深入的了解,而且懂得了如何模块间相互调用和跳转。这次实验不仅仅增加了我的编程能力,还增加了团队合作能力,为课程设计打下了基础。
9. 实验总结与心得体会
此次实验课主要是在ARM3000平台上进行嵌入式系统的开发,了解嵌入式系统开发的流程和方法,并在对uCOS-II系统进行裁剪,得到新的操作系统,同时熟悉在ARM7TDMI 的JTAG 仿真器和调试,并在硬件上实现对嵌入式系统的移植。
通过这次的实验课,加深对了对嵌入式系统原理和方法的理解,并学会了在ARM3000平台上进行相关的嵌入式系统的开发流程和方法,提高了自己的实践能力,对uCOS-II系统有了更深层次的理解。