南 京 理 工 大 学
嵌入式系统技术实验报告

指导老师: 孙瑜
实验日期: 20##年11月
实验一:熟悉Linux 开发环境
一、实验目的
熟悉Linux开发环境,学会基于S3C2410的Linux开发环境的配置和使用。使用Linux的armv4l-unknown-linux-gcc编译,使用基于NFS方式的下载调试,了解嵌入式开发的基本过程。
二、实验仪器
硬件:UP-NETARM2410-S嵌入式实验平台、PC机。
软件:PC机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX开发环境
三、实验内容
本次实验使用Redhat Linux 9.0操作系统环境,安装ARM-Linux的开发库及编译器。创建一个新目录,并在其中编写hello文件。学习在Linux下的编程和编译过程,以及ARM开发板的使用和开发环境的设置。下载已经编译好的文件到目标开发板上运行。
四、实验步骤
1、建立工作目录
[root@zxt smile]# mkdir hello
[root@zxt smile]# cd hello
2、编写程序源代码
实际的hello.c源代码较简单,如下:
#include <stdio.h>
void main(void)
{
printf(“hello world \n”);
}
用下面的命令来编写“hello.c”的源代码,进入hello目录使用vi命令来编辑代码:[root@zxt hello]# vi hello.c
按“i”或者“a”进入编辑模式,录入上面的代码,完成后按Esc键进入命令状态,再用命令“:wq ”,保存并退出。这样在当前目录下建立了一个名为“hello.c”的文件。
3、编译链接
要使上面的“hello.c”程序能够运行,将其经过编译和连接,生成可执行文件。输入 gcc hello.c -o hello 进行编译,再输入 ./hello 运行程序,观察结果1。
4、在之前的基础上,进入hello文件,输入armv4l-unknown-linux-gcc hello.c -o hello 和 cp hello /arm2410s 进行交叉编译,输入 ifconfig eth0 192.168.0.121设置IP;输入telnet 192.168.0.115登入开发板,输入root开始进行挂载:mount -o nolock 192.168.0.121:/arm2410s /mnt ;再通过cd mnt找到hello文件,最后输入./hello 运行程序,观察结果2。
五、实验结果
观察实验结果1,屏幕上显示hello world 截图如图1所示:

图 1 运行程序观察结果1的输出
经过交叉编译、挂载等运行hello文件,观察结果2输出如图2所示,屏幕上同样显示hello world
图 2 运行程序观察结果2的输出
实验二:多线程应用程序设计
一、实验目的
了解多线程程序设计的基本原理以及学习pthread库函数的使用。
二、实验仪器
硬件:UP-NETARM2410-S 嵌入式实验平台,PC机。
软件:PC机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX开发环境。
三、实验内容
熟悉几个重要的PTHREAD库函数的使用,掌握共享锁和信号量的使用方法。进入/arm2410s/exp/basic/02_pthread目录,运行make产生pthread程序,使用NFS方式连接开发主机进行运行实验。
四、实验步骤
1、编写并编译简单的多线程示例程序
2、阅读源代及编译应用程序
进入exp/basic/02_pthread目录,使用vi编辑器或其他编辑器阅读理解源代码。运行make产生pthread 可执行文件。
3、下载和调试
切换到minicom终端窗口,使用NFS mount 开发主机的/arm2410s 到/host 目录。
进入/host/exp/basic/pthread目录,运行pthread,观察运行结果的正确性。
五、实验结果
实验结果如图2.1所示
图 2.1 多线程实验结果截图
实验三:串行端口程序设计
一、实验目的
了解在linux环境下串行程序设计的基本方法。
掌握终端的主要属性及设置方法,熟悉终端I/O函数的使用。
学习使用多线程来完成串口的收发处理。
二、实验仪器
硬件:UP-NETARM2410-S嵌入式实验平台、PC机。
软件:PC机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX开发环境。
三、实验内容
学习终端I/O函数的使用方法,学习将多线程编程应用到串口的接收和发送 程序设计中。
四、实验步骤
1、阅读理解源码
进入exp\basic\03_tty目录,使用vi编辑器阅读理解源代码。
2、编译应用程序
运行make产生term可执行文件
[root@zxt root]# cd /arm2410s/exp/basic/03_tty/
[root@zxt 03_tty]# make
[root@zxt 03_tty]# ls
Makefile Makefile.bak term term.c term.o tty.c
3、下载调试
切换到minicom终端窗口,使用NFS mount开发主机的/arm2410s到/host目录。进入exp\basic\03_tty目录,运行term,观察运行结果的正确性。
telnet 192.168.0.115
root
[/mnt/yaffs] cd /dev
[/dev] ln –sf /dev/tts/0 ttyS0 (注意首字母是l, 不是数字1)
[/dev] cd /mnt/yaffs
[/mnt/yaffs] mount -t nfs -o nolock 192.168.0.121:/arm2410s /host
[/mnt/yaffs]cd /host/exp/basic/03_tty/
[/host/exp/basic/03_tty]./term
五、实验结果
本实验中打开串口设备接收数据,结果显示如下图3.1所示:
图 3.1 串口接收数据结果显示
实验四: A/D 接口实验
一、实验目的
了解在linux环境下对S3C2410芯片的8通道10位A/D的操作与控制。
二、实验设备及工具
UP-NETARM2410-S嵌入式实验平台、PC机Pentium 500以上,硬盘10G以上。
PC机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX 开发环境
三、实验内容
学习A/D接口原理,了解实现A/D系统对于系统的软件和硬件要求。阅读ARM芯片文档,掌握ARM的A/D相关寄存器的功能,熟悉ARM系统硬件的A/D相关接口。利用外部模拟信号编程实现ARM循环采集全部前4路通道,并且在超级终端上显示。
四、实验步骤
1、阅读理解源码
进入/arm2410s/exp/basic/04_ad目录,使用vi编辑器或其他编辑器阅读理解源代码。
2、编译应用程序
运行make 产生ad 可执行文件
[root@zxt /]# cd /arm2410s/exp/basic/04_ad/
[root@zxt 04_ad]# make
[root@zxt 04_ad]# ls
ad hardware.h main.o Makefile.bak s3c2410-adc.h bin main.c Makefile readme.txt src
3、下载调试
换到minicom 终端窗口,使用NFS mount 开发主机的/arm2410s 到/host 目录。
telnet 192.168.0.115
root
[/mnt/yaffs] mount -t nfs -o nolock 192.168.0.56:/arm2410s /host
[/mnt/yaffs]cd ad
[/mnt/yaffs/ad]insmod s3c2410-adc.o
[/mnt/yaffs]cd /host/exp/basic/04_ad/
[/host/exp/basic/04_ad]./ad
五、实验结果
本实验运行结果如下图4.1所示
图 4.1 A/D 接口实验运行结果
实验五:D/A 接口实验
一、实验目的
掌握MAX504 D/A转换芯片的使用方法
掌握不带有D/A的CPU扩展D/A功能的主要方法
了解D/A驱动程序加入内核的方法
二、实验仪器
硬件:UP-NETARM2410-S嵌入式实验平台、PC机。
软件:PC 机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX开发环境
三、实验内容
了解实现D/A系统对于系统的软件和硬件要求。阅读MAX504芯片文档,掌握 其使用方法。
四、实验步骤
1. 阅读理解源码
进入/arm2410s/exp/basic/05_da目录,使用vi编辑器阅读理解源代码。
2. 编译应用程序
运行make 产生da 可执行文件da_main
[root@zxt /]# cd /arm2410s/exp/basic/05_da/
[root@zxt 05_da]# make
[root@zxt 05_da]# ls
da_main da_main.c da_main.o doc drivers Makefile s3c44b0-spi.h
3. 下载调试
切换到minicom终端窗口,使用NFS mount开发主机的/arm2410s到/host目录,然后进入/host/exp/05_da/drivers目录,用insmod exio.o命令插入D/A驱动,并用lsmod命令查看是否已经插入。
[/mnt/yaffs]cd /host/exp/basic/05_da/
[/host/exp/basic/05_da]cd drivers/
[/host/exp/basic/05_da/drivers]insmod exio.o
Using exio.o
[/host/exp/basic/05_da/drivers]lsmod
Module Size Used by Not tainted
exio 2384 0 (unused)
i2c-tops2 14104 0 (unused)
进入/host/exp/basic/05_da目录,运行./da_main,观察运行结果的正确性。
[/host/exp/basic/05_da]./da_main 0 1
五、实验结果
通过ls查看da_main,结果如图5.1所示:
图 5.1 da_main的内容
用insmod exio.o命令插入D/A驱动,并用lsmod命令查看是否已经插入。查看结果如下图5.2所示:

图 5.2 观察D/A驱动是否插入
进入/host/exp/basic/05_da目录,运行./da_main,观察运行结果如下图5.3所示,电压为1v:
图 5.3 运行da_main 输出结果
总结
本次实验内容安排紧凑,实验一的操作过程让我们尽快熟悉了实验环境,学会使用vi编辑查看代码以及设置NFS等环境参数,而接下来的实验则让我们渐渐对各种的基本命令有了最直接的认识。通过让我们自己编辑代码,运行程序,观察结果来逐步了解这些代码的含义。实验是一次学与习的过程,让我们在操作的同时加深理论认识。此外,实验过程中碰到的形形色色的问题也让我们收获颇丰,通过学长学姐们的解释与指导,让我们将所学知识得到一定的扩展。
致谢
感谢实验过程中学长学姐们的耐心指导以及同学们的热心帮助,最后感谢老师在课上的悉心教导!
第二篇:《嵌入式技术基础与实践》实验报告
20##级计算机科学与技术学院
《嵌入式技术基础与实践》实验报告
飞思卡尔S08系列单片机实验系统
综合实验的开发
学号:0927401075
姓名:袁杰
20##年6月10日
目录
第1章 需求分析... 1
第2章 系统构成... 2
2.1 硬件原理图... 2
2.2 软件结构图... 2
2.2.1 MCU端软件结构... 3
2.2.2 PC端软件结构... 4
第3章 MCU方的程序设计... 5
3.1 串口数据接收与发送... 5
3.2 时钟控制... 5
3.3主程序... 9
第4章 PC方程序控制... 13
4.1 串口数据接收与发送... 14
第5章 总结与体会... 18
第6章 使用说明... 19
第1章 需求分析
HC08和HCS08单片机是Freescale公司于20##年前后推出的新一代单片机。S08是HCS08的简写,表示增强型HC08。从1993年起,Freescale公司为全球提供的8位微控制器已超过50亿片,然而我国国内大多数“熟悉”单片机的人却不知晓这一底细,国内的微控制器市场从20世纪80年代开始,一直由Intel公司推出的MCS-51占据着绝对的统治地位。人们又逐渐发现,从进口的电子信息类产品,特别是各类通信产品中,其中有MCU的,多数使用了Freescale的产品,而不是MCS-51。因此学习Freescale S08是非常重要,本报告描述一个Freescale S08单片机实验系统软件实例(Light.mcp),通过各个不同模块,验证单片机各模块工作是否正常。可以独立工作观察MCU工作是否正常,也可以通过串口与PC机连接,实现与PC机的相互控制。
设计时首先设计MCU与PC机间的标志符号位,用于确定双方通讯数据的含义。MCU端程序编写完成后,使用串口调试器观察输出数据,输入控制数据观察MCU工作状态。使用串口调试器调试成功后,再使用C#编写与其匹配的可视化程序。
实现非联机验证最小系统、普通I/O口输入输出、驱动LCD显示模块功能。联机验证串口数据接收与发送、小灯测试、LCD及LED、时钟计时、PWM、键盘输入、AD转换、FLASH读写模块功能。
第2章 系统构成
2.1 硬件原理图
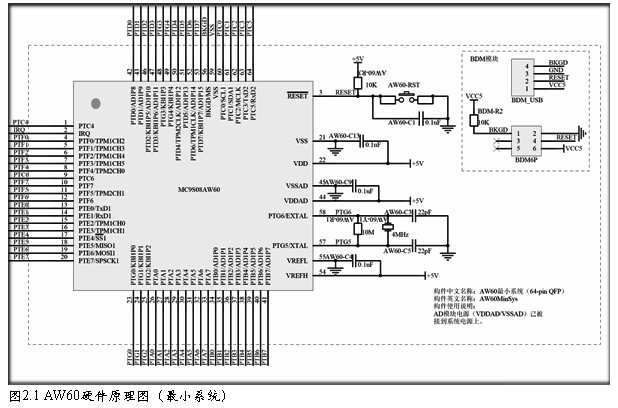
系统使用MC9S08AW60型MCU为核心,AW60芯片的硬件最小系统包括:电源及其滤波电路、复位电路、晶振电路及PLL电路滤波电路、写入器接口电路。其引脚包括:电源信号引脚、复位信号引脚、主要功能模块引脚和其它引脚。
2.2 软件结构图
软件包括MCU端与PC端2部分组成,下面分别介绍2部分软件的结构。
2.2.1 MCU端软件结构
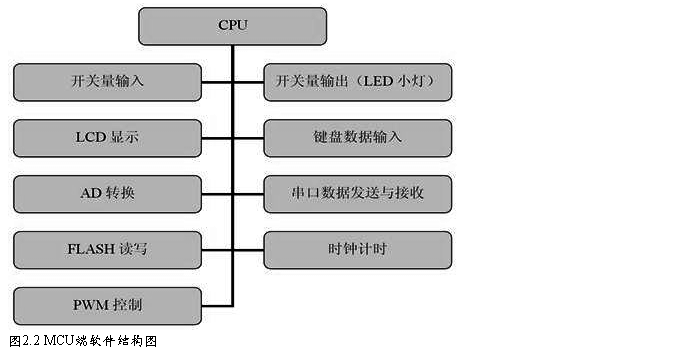
根据需求分析,对需要测试的功能进行编程,MCU端包含LED小灯、LCD显示、开关量输入、键盘输入、AD转换、PWM、FLASH读写、串口数据发送与接受等模块。
MCU端软件结构图,如图2.2所示。
在脱离PC端控制的情况下LED小灯、LCD显示可以得到验证,如果需要验证键盘输入、AD转换与串口数据发送与接收必须与PC端联机操作。
2.2.2 PC端软件结构
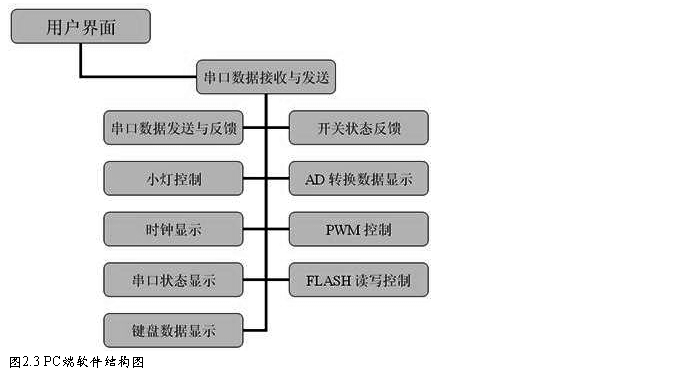
PC端使用C#编程,以串口通讯为核心,使用串口与MCU进行通讯实现,对MCU的控制和对MCU反馈信息进行处理,并反映在用户界面上。
根据MCU提供的功能,编写程序匹配其工作。PC端程序包括串口数据输入输出、开关状态反馈、小灯控制、AD转换数据显示、时钟、PWM控制、FLASH读写、键盘数据显示模块。软件结构图如图2.3所示。
第3章 MCU方的程序设计
本章节将详细介绍MCU端的各个功能模块,其中包括串口数据输入输出、LCD显示、键盘、AD转换、PWM、时钟计时、FLASH读写。
程序基于C语言编写,使用面向硬件对象模块封装的思想。面向硬件对象模块的封装是对系统中的每个硬件对象建立相对应的头文件和硬件驱动程序文件。头文件中主要包含该硬件的接口和相应的寄存器设置参数,硬件驱动程序文件主要是对该硬件的驱动,同时标注出各个功能模块的功能,入口,出口和堆栈深度。这样做剩下的编程工作就只是面向变量和PC的编程,屏蔽的具体硬件对象的差异性,提高了程序的移植性和复用性。
3.1 串行通信数据接收与发送
MCU端使用串口中断,实现对串口数据的接收与发送。串口是MCU与PC通讯的唯一通道,在串口中断处理子程序中,将处理由PC端发送的控制指令与数据。标志位确定PC端发送指令的类型,并加以处理,使用MCU内部标志位确定所需要做的工作,在中断结束后使用主程序完成相应操作。
串口中断处理程序:
//isrSCIre:接收中断处理函数----------------------------------------------------------------------------*
//功能:接收1个字节数据, 发送接到的数据 *
// 总中断关闭,但是接收标志还是有,则直接识别缓冲区,就取走就行。 *
//参数:无 *
//返回:无 *
//内部调用函数:SCIreN, SCIsendN *
//---------------------------------------------------------------------------------------------------------------*
interrupt void isrSCIre(void)
{
uint8 f,i,flag; //标志是否接受到数据
DisableInterrupt(); //禁止总中断
//接收32个字节的数据
f = SCIReN(1,1, SerialBuff);
//若收到数据,则发送接到的数据
if (f == 0)
{
if(SerialBuff[0]>=130 && SerialBuff[0]<=137 )
{
flag=SerialBuff[0];
}
if(flag==130)
{
//light模块
LightBuff=SCIRe1(1,&i);
}
else if(flag==131) //LCD标志
{//连续接收可以,代码如下
LCDLen=SCIRe1(1,&i); //LCD显示字符长度
SCIReN(1,LCDLen,ShowBuff);//LCD显示的内容
}
else if(flag==132)//时钟标志
{
//接收3个字节的数据
SCIReN(1,3, time);
}
else if(flag==133) //LED标志
{
//pwm处理模块
pwmDutyPC = SCIRe1(1,&i);
}
else if(flag==135)//LED标志
{
//接收4个字节的数据
i=SCIReN(1,4, LEDBuff);
if(i==0)
{
SCISend1(1,135);
SCISendN(1,4, LEDBuff);
for(i=0;i<4;i++)
LEDBuff[i]+='0';
}
}
else if(flag==137)
{
//AD模块
chanelNum = SCIRe1(1,&i);
}
else
{
SCISendN(1,1, SerialBuff);
}
}
EnableInterrupt(); //开放总中断
}
3.2 时钟控制
MCU端实现精度为1秒的时钟计时功能,可以通过PC端发送指令设定当前时间,每秒通过串口发送时钟数据。使用MCU内部定时器0实现计时,定时器0同时作为PWM使用,所以内部需要解决冲突问题。
中断服务中尽量减少其工作量,所以只对秒信号进行处理,其他计时工作使用主程序完成。
isrT1OV:定时器溢出中断处理函数:
//isrT1OV:定时器1溢出中断处理函数------------------------------------------*
//功能:以秒为最小单位计时,并清定时器1溢出标志位 *
//内部调用: *
// SecAdd1:以秒为最小单位递增时,分,秒缓冲区的值 *
//-------------------------------------------------------------------------*
interrupt void isrT1OV(void)
{
uint8 temp;
DisableInterrupt(); //禁止总中断
SecAdd1(time); //1s到,递增时,分,秒缓冲区的值
SCISend1(1,132);
SCISendN(1,3, time);
temp = AW60_TPM_CSTR(2); //1.读取定时器1状态和控制寄存器T1SC
AW60_TPM_CSTR(2) &= ~AW60_TPM_CSTR_TOF; //2.向定时器溢出标志TOF写0
EnableInterrupt(); //开放总中断
}
键盘中断处理函数:
//isrKeyBoard:键盘中断处理函数---------------------------------------------*
//功能:识别按键并发送键值,把键值转换成对应的定义值,再从串口发送出去 *
//调用函数: *
// (1)扫描法读取键值函数(KBscanN) *
// (2)键值转为定义值函数(KBdef) *
// (3)串行发送一个字节数据(SCIsend1) *
// (4)键盘初试化(KBInit) *
//-------------------------------------------------------------------------*
interrupt void isrKeyBoard(void)
{
uint8 value;
uint16 i;
for(i=0; i<1000; i++);
DisableInterrupt(); //关总中断
DisableKBint(); //屏蔽键盘中断
value = KBScanN(10); //扫描键值,存于value中
if(value!=0xFF)
{
SCISend1(1,134);
SCISend1(1,KBDef(value));//键值转化为定义值并发送
}
KBInit(); //键盘初始化键盘中断
EnableKBint(); //开放键盘中断
EnableInterrupt();//开总中断
}
3.3主程序
主程序作用是将系统初始化,并且根据标志处理各工作
//-------------------------------------------------------------------------*
// 工 程 名: Light *
// 程序描述: MCU综合实验,控制系统各个模块工作 *
// 目 的: Freescale AW系列MCU C语言综合程序 *
// 说 明: 包含串口数据输入输出、LCD显示、键盘、AD转换、PWM、时钟计时、FLASH读写等模块 *
//---------------苏州大学飞思卡尔嵌入式系统实验室20##年--------------------*
void main()
{
//仅在本函数中用
uint8 i;
uint8 ma;
uint8 LCDi=0;
//定义初始显示缓存并赋初值
const uint8 DisPalyInit[]
= "Wait Receiving.. Soochow 2010.09";
LCDLen=0;
chanelNum = 30; //为30,说明没有收到AD转换的客户端信息
pwmDutyPC =101;
//1 关总中断
DisableInterrupt(); //禁止总中断
//1.1 芯片初始化
MCUInit();
//2. 模块初始化
SCIInit(1,SYSTEM_CLOCK,9600); //(1) 串口初始化
Light_Init(Light_Run_PORT,Light_Run,Light_OFF); //(2) 灯和蜂鸣器的引脚初始化
KBInit(); //(3) 按键初始化
TPMinit(2); //(4) 定时器2初始化
LEDinit();
PWM(1,0,0x800,0); //定时器2通道0初始输出占空比为0周期为1s的PWM波
ADCInit(); //AD初始化
//3. LCD显示初始化
LCDshow((uint8 *)DisPalyInit);
//4. 内存初始化
//(1) "时分秒"缓存初始化(00:00:00)
time[0] = 0;
time[1] = 0;
time[2] = 0;
//(2) 小灯状态初始化3,表示没有命令发送过来
LightBuff = 3;
//(3) 数码管状态初始化
LEDBuff[0]='8';
LEDBuff[1]='8';
LEDBuff[2]='8';
LEDBuff[3]='8';
//5. 开放各模块中断
EnableSCIReInt(); //(1)开放SCI接收中断
EnableTimer(2); //(2)开放定时器1溢出中断
EnableKBint();
//6. 开放总中断
EnableInterrupt();
//主循环
while (1)
{
if(LightBuff!=3)
{
//不等于3表明PC机有命令发送过来,然后进行处理
Light_Change(Light_Run_PORT,Light_Run);
SCISend1(1,130); //发送串口的标志
SCISend1(1,LightBuff);
LightBuff = 3;
}
if(LCDLen!=0) //接收在中断中进行
{
for(i=LCDLen;i<32;i++) //为了满足32个字符
ShowBuff[i]='*';
//LCD显示MCU从串口接收到的32个数据
LCDshow((uint8 *)ShowBuff);
SCISend1(1,131); //发送LCD的标志
SCISendN(1,32, ShowBuff); //发回给PC机
LCDLen=0;
}
if(pwmDutyPC<101)
{
PWM(1,0,0x800,pwmDutyPC);
Delay(10);
pwmDutyPC = 101;
}
if(chanelNum<30)
{
ma = (uint8)ADCAve(chanelNum, 50);
SCISend1(1,137);
SCISend1(1,ma);
chanelNum = 30;
}
LEDshow(LEDBuff);
}
}
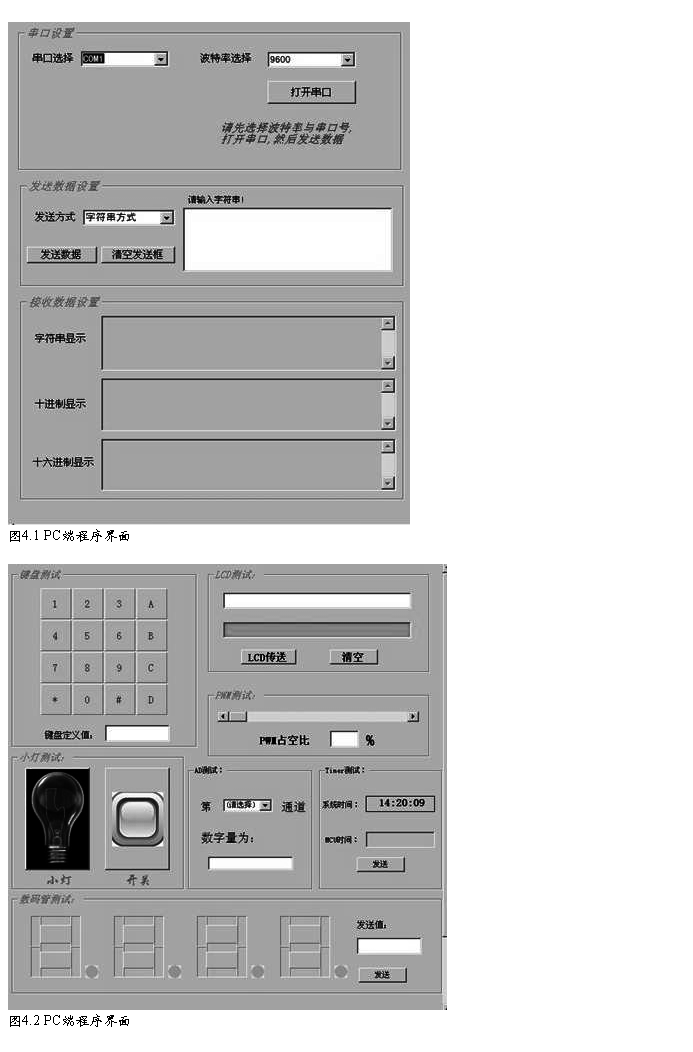
第4章 PC方程序控制
PC端程序以串口为核心,用户界面上划分多个区域,实现不同控制功能。PC端用户界面如图4.1,4.2所示(因为界面太大,分为2幅图片截取)。
4.1 串口数据接收与发送
串口接收数据子程序实现对于标志位的识别与处理,将MCU发送的数据进行分类,并且显示在用户界面上。
///-----------------------------------------------------------------*
/// <summary> *
/// 对 象:SCIPort *
/// 事 件:DataReceived *
/// 功 能:串口接收数据 *
/// 函数调用:(1)SCIReceiveData,串口接收函数 *
/// (2)SCIUpdateRevtxtbox,更新文本框中的内容 *
/// </summary> *
/// <param name="sender"></param> *
/// <param name="e"></param> *
///-----------------------------------------------------------------*
private void SCIPort_DataReceived(object sender,
System.IO.Ports.SerialDataReceivedEventArgs e)
{
if (!SCIPort.IsOpen)
{
this.TSSLState.Text = "串口没打开!";
return;
}
String str = String.Empty;
bool Flag;//标记串口接收数据是否成功
int len; //标记接收的数据的长度
//调用串口接收函数,并返回结果
Flag = sci.SCIReceiveData(SCIPort, ref PublicVar.g_ReceiveByteArray);
if (Flag == true)
{
//显示MCU端发来的数据,以便于调试
len = PublicVar.g_ReceiveByteArray.Length;
//对于字符串形式,考虑到可能有汉字,
//直接调用系统定义的函数,处理整个字符串
str = Encoding.Default.GetString(PublicVar.g_ReceiveByteArray);
if ((this.TbShowString.Text).Length > 100)
{
this.TbShowString.Text = string.Empty;
this.TbShowDec.Text = string.Empty;
this.TbShowHex.Text = string.Empty;
}
else
SCIUpdateRevtxtbox(TbShowString, str);
//十进制和十六进制形式按字节进行处理
for (int i = 0; i < len; i++)
{
data = PublicVar.g_ReceiveByteArray[i]; //获取命令类型
//SCIUpdateRevtxtbox(TbShowString, ((char)data).ToString() ); //串口字符显示
//十进制都是按照三位来显示,字节之间有空格表示区分
SCIUpdateRevtxtbox(TbShowDec, data.ToString("D3") + " ");
//十六进制都是按照两位来显示,字节之间有空格表示区分
SCIUpdateRevtxtbox(TbShowHex, data.ToString("X2") + " ");
if (data >= 130 && data <= 150)
{
commandType = data;
//准备使长度值=0
if (commandType == 131) this.tbLCDOutput.Text = string.Empty;
if (commandType == 132) this.tbMCUTime.Text = string.Empty;
if (commandType == 137) this.tbADValue.Text = string.Empty;
continue;
}
if (commandType == 130)
{
byte swKey = data;//获取开关状态数据
//小灯和开关模块
if (swKey == 1)//注意:这是硬件开关的状态不一定对应软件开关的状态。=1,则亮,否则暗
{
this.btnSwKey.Image = Image.FromFile(Application.StartupPath + "\\..\\..\\Pictures\\buttonOn.BMP");
this.btnLight.Image = Image.FromFile(Application.StartupPath + "\\..\\..\\Pictures\\LightOn.BMP");
}
else
{
this.btnSwKey.Image = Image.FromFile(Application.StartupPath + "\\..\\..\\Pictures\\buttonOff.BMP");
this.btnLight.Image = Image.FromFile(Application.StartupPath + "\\..\\..\\Pictures\\LightOff.BMP");
}
}
else if (commandType == 131)
{
//LCD测试模块
SCIUpdateRevtxtbox(tbLCDOutput, ((char)data).ToString());
}
else if (commandType == 132)
{
//timer模块
byte tmr = data;
tmrCount++;
tmrStr += (tmrCount > 1 ? ":" : " ") + (tmr < 10 ? ("0" + tmr.ToString()) : tmr.ToString());
if (tmrCount >= 3)
{
SCIUpdateRevtxtbox(tbMCUTime, tmrStr);
tmrCount = 0;
tmrStr = string.Empty;
commandType = 0;
}
}
else if (commandType == 133)
{
//PWM测试模块
//高端不作处理仅留一接口在此
}
else if (commandType == 134)
{
//键盘测试模块
byte kbKey = data;
for (byte j = 0; j < 16; j++)
if (KBBoard[j] == (char)kbKey)
{
kb[j].Image = Image.FromFile(Application.StartupPath + "\\..\\..\\Pictures\\KeyDown.BMP");
KBi = j;
SCIUpdateRevtxtbox(tbKBShow, KBBoard[j].ToString());
break;
}
}
else if (commandType == 135)
{
//LED测试模块
byte dtLED = data;
for (byte j = 0; j < 8; j++)
{
//复原
LEDOpr(ledCount, j, "Off");
//再根据条件使相应的条型变换
if (GetBit(ledTBL[dtLED], j))
{
LEDOpr(ledCount, j, "On");
}
}
ledCount++;
if (ledCount >= 4)
{
ledCount = 0;
}
}
else if (commandType == 137)
{
//AD转换模块
int ADValue = data;
SCIUpdateRevtxtbox(tbADValue, ADValue.ToString());
}
}
}
}
第5章 总结与体会
通过本程序的编写与调试,了解了单片机设计的基础知识,熟悉了单片机的开发与调试过程,在实践中体会编程要领。特别是将多个功能组合在一起时需要综合考虑MCU的资源利用问题,必须合理分配资源。程序设计时解决了PWM与时钟共同使用定时器0的问题,解决了LCD显示与AD转换同时使用引脚PTB0的问题等。
设计过程中学会了一些设计思想和技巧,先将各个模块独立设计并验证其功能,最后将这些模块综合起来,有步骤地实现系统由小到大的过程。
设计与实现过程让自己学到许多知识,特别是遇到问题的时候学会的查找资料,网络上大量的资源都可以使用,只需要认真检索一定可以找到需要的内容。设计系统需要信心也需要耐心,只有坚持不懈的努力才能完成任务。
第6章 使用说明
本说明介绍一个Freescale HC08单片机实验系统软件实例的使用步骤。
1.LCD显示验证,保持步骤1连线,将LCD显示器连接在实验箱默认接口上,写入字符,如正常显示说明LCD工作正常,如不显示请更换另一块LCD,如显示说明上一块LCD坏,如还不显示请检查MCU引脚是否正常。
2.与PC联机测试,请使用串口数据线将MCU与PC连接,打开PC端程序。首先观察串口状态显示,是否已经为已连接状态。如显示已连接说明通讯正常,如显示未连接请检查串口线是否正常。
3.将键盘连接在默认接口上,点击键盘,观察PC端是否显示正确的数据。
4.PC端程序还具有时钟控制、PWM,AD转换,串口数据发送与反馈等功能,预留了接口。