扫描隧道显微镜
摘要 扫描隧道显微镜是基于量子力学中的隧道效应,在表面科学、材料科学、生命科学等领域的研究中有着重大的意义和广泛的应用前景,被国际科学界公认为20世纪80年代世界十大科技成就之一。我们通过这次实验了解扫描隧道显微镜的工作原理,学习扫描隧道显微镜的使用方法。
关键词 扫描隧道显微镜 恒电流模式 恒高度模式
引言 1982年,IBM瑞士苏黎士实验室的葛·宾尼(G.Binning)和海·罗雷尔(H.Rohrer)研制出世界上第一台扫描隧道显微镜(Scanning Tunnelling Microscope,简称STM)。STM使人类第一次能够实时地观察单个原子在物质表面的排列状态和与表面电子行为有关的物化性质,在表面科学、材料科学、生命科学等领域的研究中有着重大的意义和广泛的应用前景,被国际科学界公认为20世纪80年代世界十大科技成就之一。为表彰STM的发明者们对科学研究所作出的杰出贡献,1986年宾尼和罗雷尔被授予诺贝尔物理学奖金。
扫描隧道显微镜的工作原理
隧道电流强度对针尖和样品之间的距离有着指数依赖关系,当距离减小0.1nm,隧道电流即增加约一个数量级。因此,根据隧道电流的变化,我们可以得到样品表面微小的高低起伏变化的信息,如果同时对x-y方向进行扫描,就可以直接得到三维的样品表面形貌图,这就是扫描隧道显微镜的工作原理。
隧道针尖的结构是扫描隧道显微技术要解决的主要问题之一。针尖的大小、形状和化学同一性不仅影响着扫描隧道显微镜图象的分辨率和图象的形状,而且也影响着测定的电子态。
针尖的宏观结构应使得针尖具有高的弯曲共振频率,从而可以减少相位滞后,提高采集速度。如果针尖的尖端只有一个稳定的原子而不是有多重针尖,那么隧道电流就会很稳定,而且能够获得原子级分辨的图象。针尖的化学纯度高,就不会涉及系列势垒。例如,针尖表面若有氧化层,则其电阻可能会高于隧道间隙的阻值,从而导致针尖和样品间产生隧道电流之前,二者就发生碰撞。
目前制备针尖的方法主要有电化学腐蚀法、机械成型法等。
制备针尖的材料主要有金属钨丝、铂- 铱合金丝等。钨针尖的制备常用电化学腐蚀法。而铂- 铱合金针尖则多用机械成型法,一般直接用剪刀剪切而成。不论哪一种针尖,其表面往往覆盖着一层氧化层,或吸附一定的杂质,这经常是造成隧道电流不稳、噪音大和扫描隧道显微镜图象的不可预期性的原因。因此,每次实验前,都要对针尖进行处理,一般用化学法清洗,去除表面的氧化层及杂质,保证针尖具有良好的导电性。
实验过程
1. 准备针尖和样品
2. 手动逼近样品和针尖,使之距离约为1mm;切忌使针尖与样品发生相撞;
3. 设置参数:“隧道电流”置为 0.25~0.3nA;“针尖偏压”置为 100~200mV;软件控制马达,使针尖自动逼近进入隧道区;
4. 根据不同的样品设置不同的扫描范围;
5. 根据不同的模式设置不同的扫描速度,然后开始扫描。
6. 得到扫描图像后,可进行一定的图像处理。
7. 实验结束后,一定要先使用软件控制马达自动退。
8. 关闭系统
实验结果
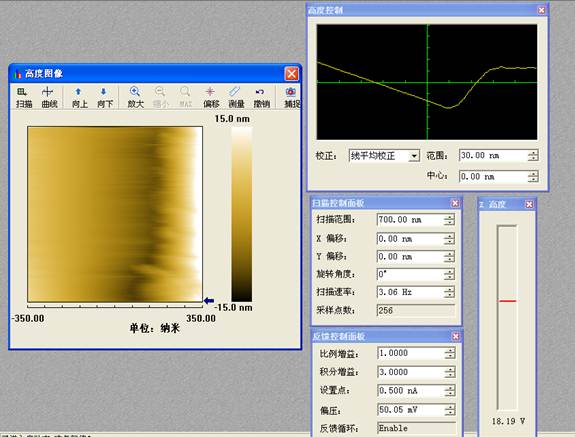
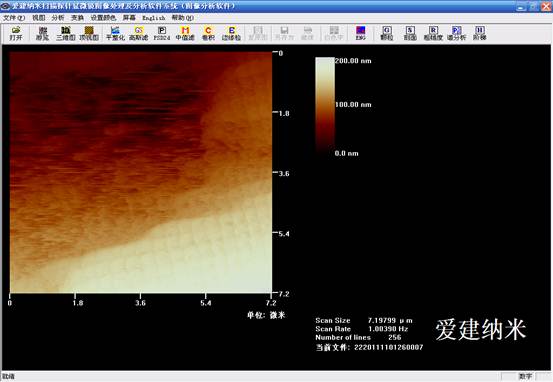
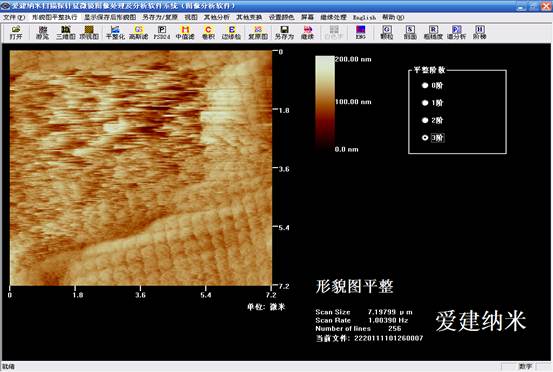
样品最大形貌如下图所示,样品中间有一条沟,形貌较粗糙。
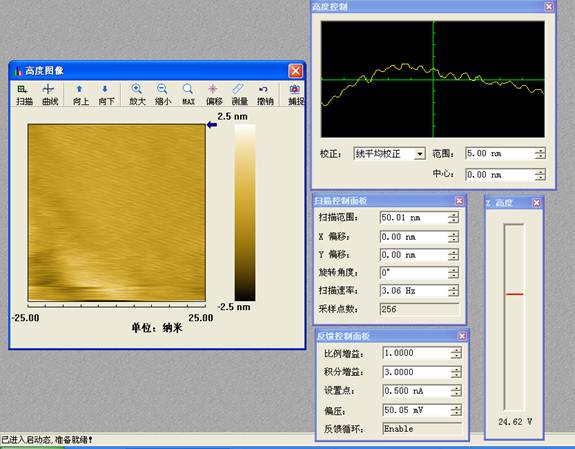
经过各项参数修改,以及图像处理,得到最终图像如下图:
放大图像如下图:
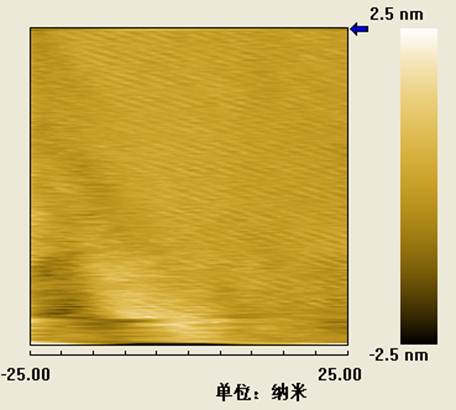
从图中,我们可以材料形貌,表面非常粗糙。
实验总结
通过本实验,我们学习了扫描隧道显微镜的原理,并运用扫描隧道显微镜对样品的形貌进行了观察,对扫描隧道显微镜的使用有了一个更深入的了解。但由于实验仪器的损坏,非常可惜不能进行更加精细的扫描,得到更加精细的形貌。通过本实验,我深刻的认识到扫描隧道显微镜的强大功能,它对我们研究微小物体提供了方法。
第二篇:扫描隧道显微镜(STM)实验报告


实 验 报 告
姓名小编 班级 01**101 学号 011**01** 组别 实验日期 20##-11-23
课程名称 大学物理实验 同实验者 指导教师 成绩

扫描隧道显微镜(STM)
一.实验目的
1掌握和了解量子力学中的隧道效应的基本原理。
2学习和了解扫描隧道显微镜的基本结构和基本实验方法原理。
3基本了解扫描隧道显微镜的样品制作过程、设备的操作和调试过程,并
最后观察样品的表面形貌。
4正确使用AJ—1扫描隧道显微镜的控制软件,并对获得的表面图像进行处
理和数据分析。
二.实验仪器
AJ—1型扫描隧道显微镜;P-IV型计算机;样品(高序石墨);
金属探针及工具。
三.实验原理
1.隧道电流
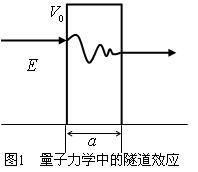
扫描隧道显微镜的工作原理是基于量子力学的隧道效应。对于经典物理学来说,当一粒子的动能E低于前方势垒的高度V0时,它不可能越过此势垒,即透射系数等于零,粒子将完全被弹回(如图3)。而按照量子力学的计算,在一般情况下,其透射系数不等于零,也就是说,粒子可以穿过比它的能量更高的势垒,这个现象称为隧道效应,它是由于粒子的波动性而引起的,只有在一定的条件下,这种效应才会显著。经计算,透射系数
 (1)
(1)
由式中可见,透射系数T与势垒宽度a、能量差(V0-E)以及粒子的质量m有着很敏感的依赖关系,随着a的增加,T将指数衰减,因此在宏观实验中,很难观察到粒子隧穿势垒的现象。
扫描隧道显微镜是将原子线度的极细探针和被研究物质的表面作为两个电极,当样品与针尖的距离非常接近时(通常小于1 nm),在外加电场的作用下,电子会穿过两个电极之间的势垒流向另一电极。隧道电流I是针尖的电子波函数与样品的电子波函数重叠的量度,与针尖和样品之间距离S和平均功函数Φ有关
 (2)
(2)
式中Vb是加在针尖和样品之间的偏置电压,平均功函数 ,Φ1和Φ2分别为针尖和样品的功函数,A为常数,在真空条件下约等于1。隧道探针一般采用直径小于1mm的细金属丝,如钨丝、铂—铱丝等,被观测样品应具有一定的导电性才可以产生隧道电流。
,Φ1和Φ2分别为针尖和样品的功函数,A为常数,在真空条件下约等于1。隧道探针一般采用直径小于1mm的细金属丝,如钨丝、铂—铱丝等,被观测样品应具有一定的导电性才可以产生隧道电流。
由(2)式可知,隧道电流强度对针尖和样品之间的距离有着指数的依赖关系,当距离减小0.1nm,隧道电流即增加约一个数量级。因此,根据隧道电流的变化,我们可以得到样品表面微小的高低起伏变化的信息,如果同时对x-y方向进行扫描,就可以直接得到三维的样品表面形貌图。
2.STM的结构和工作模式
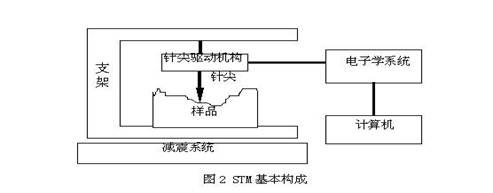
STM仪器由具有减振系统的STM头部、电子学控制系统和包括A/D多功能卡的计算机组成(图4)。头部的主要部件是用压电陶瓷做成的微位移扫描器,在x-y方向扫描电压的作用下,扫描器驱动探针在导电样品表面附近作x-y方向的扫描运动。与此同时,一台差动放大器检测探针与样品间的隧道电流,并把它转换成电压反馈到扫描器,作为探针z方向的部分驱动电压,以控制探针作扫描运动时离样品表面的高度。
STM常用的工作模式主要有以下两种:
a.恒流模式,如图3(a),利用压电陶瓷控制针尖在样品表面x-y方向扫描,而z方向的反馈回路控制隧道电流的恒定,当样品表面凸起时,针尖就会向后退,以保持隧道电流的值不变,当样品表面凹进时,反馈系统将使得针尖向前移动,则探针在垂直于样品方向上高低的变化就反映出了样品表面的起伏。将针尖在样品表面扫描时运动的轨迹记录并显示出来,就得到了样品表面态密度的分布或原子排列的图象。这种工作模式可用于观察表面形貌起伏较大的样品,且可通过加在z方向的驱动电压值推算表面起伏高度的数值。恒流模式是一种常用的工作模式,在这种工作模式中,要注意正确选择反馈回路的时间常数和扫描频率。
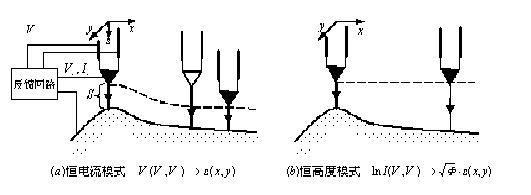
图3 扫描隧道显微镜的两种工作模式
b.恒高模式,如图3(b),针尖的x-y方向仍起着扫描的作用,而z方向则保持绝对高度不变,由于针尖与样品表面的局域高度会随时发生变化,因而隧道电流的大小也会随之明显变化,通过记录扫描过程中隧道电流的变化亦可得到表面态密度的分布。横高模式的特点是扫描速度快,能够减少噪音和热漂移对信号的影响,实现表面形貌的实时显示,但这种模式要求样品表面相当平坦,样品表面的起伏一般不大于1nm,否则探针容易与样品相撞。
3. STM针尖的制备
隧道针尖的制备是STM技术中要解决的主要问题之一,针尖的大小、形状和化学同一性不仅影响着图象的分辨率和图象的形状,而且也影响着测定的电子态。针尖的宏观结构应使得针尖具有高的弯曲共振频率,从而减小相位滞后,提高采集速度。如果针尖的最尖端只有一个稳定的原子而不是有多重针尖,那么隧道电流就会很稳定,而且能够获得原子级分辨率的图象。针尖的化学纯度高,就不会涉及系列势垒。例如,针尖表面若有氧化层,则其电阻可能会高于隧道间隙的阻值,从而导致在针尖和样品间产生隧道电流之前,二者就发生碰撞。
现在常用铂铱合金作为隧道针尖材料。铂材料虽软,但不易被氧化,在铂中加入少量铱(例如铂铱的比例为80%:20%)形成的铂铱合金丝,除保留了不易被氧化的特性外,其刚性也得到了增强.为了得到锐利的针尖,通常对铂铱合金丝用机械剪切方法成型。
4. STM的减震
由于STM工作时的针尖与样品间距一般小于1nm,同时由式(2)可见,隧道电流与隧道间距成指数关系,因此任何微小的振动,例如由说话的声音和人的走动所引起的振动,都会对仪器的稳定性产生影响。许多样品,特别是金属样品,在STM的恒流工作模式中,观察到的表面起伏通常为0.01nm。因此,STM仪器应具有良好的减震效果,一般由振动所引起的隧道间距变化必须小于0.001nm。
建筑物一般在10到100Hz频率之间摆动,当在实验室附近的机器工作时,可能激发这些振动。通风管道、变压器和马达所引起的振动在6到65Hz之间,房屋骨架、墙壁和地板一般在15到25Hz易产生与剪切和弯曲有关的振动。实验室工作人员所产生的振动(如在地板上的行走)频率在1到3Hz范围。因此,STM减震系统的设计应主要考虑1到100Hz之间的振动。隔绝振动的方法主要靠提高仪器的固有振动频率和使用振动阻尼系统。目前实验室常用的减震系统采用合成橡胶缓冲垫、弹簧(或橡胶带)悬挂以及磁性涡流阻尼等三种综合减震措施来达到减震的目的。扫描隧道显微镜的底座常常采用金属板(或大理石)和橡胶垫叠加的方式,其作用主要是用来降低大幅度冲击震动所产生的影响,其固有阻尼一般是临界阻尼的十分之几甚至是百分之几。除此之外,对探测部分采用弹簧悬吊的方式,金属弹簧的弹性常数小,共振频率较小(约为0.5Hz),但其阻尼小,常常要附加其它减震措施。在一般情况下,以上两种减震措施基本上能够满足扫描隧道显微镜的减震要求。对仪器性能要求较高时,还可以配合诸如磁性涡流阻尼等其它减震措施。测量时,探测部分(探针和样品)通常罩在金属罩内,金属罩的作用主要是对外界的电磁扰动、空气震动等干扰信号进行屏蔽,提高探测的准确性。
【实验装置与控制处理软件】
NanoView-I型扫描隧道显微镜是面向教学实验开发的新型实验装置。
1. 头部系统
扫描系统采用压电陶瓷管作为扫描器,样品固定在扫描器上,样品相对于探针作扫描运动。支撑系统包括基座、三根钢柱、悬吊支架和三只挂脚构成的托架系统。驱进系统由双手动螺旋测微头和一只精密步进马达顶杆(可手调也可计算机控制)组成,三点支撑针块并控制样品与针尖距离。防振系统采用三根弹簧吊住底盘,靠弹簧衰减由基座传入的震动。
驱进调节机构的设计主要用于粗调和精细调节针尖和样品之间的距离。利用两个螺旋测微头手动粗调,配合步进马达(可以手调也可计算机控制调节),先调节针尖和样品距离至一较小间距(毫米级),然后驱动步进马达,使间距从毫米级缓慢降至纳米级(在有反馈的情形下),进入扫描状态。退出时先驱动步进马达,使间距缓慢增大,退出扫描间距后,可加快退出速度。
STM系统的振动隔离措施采用平板堆垛系统加上悬吊来隔离振动。平板堆垛系统由大理石块(或金属平板)和橡胶圈构成。用于较大范围的扫描时,这种措施已经能够有效地隔离振动。在进行精细的扫描(比如获得原子图象)时,需要采用弹簧进行悬吊。
2. 电子学控制系统
STM电子学控制系统的核心是一个无静态差动反馈回路,控制隧道结间距变化。在恒流工作模式中其基本过程是首先测出隧道电流并转换成电压,然后与参考电流比较,经过差动放大后再输入积分器,由积分器输出控制扫描管Z方向的伸缩,使得隧道电流恒定在预设的工作点上。由于反馈系统是一种高增益电路,隧道电流又在纳安的数量级,很容易受到外界的干扰,因此对系统要进行很好的屏蔽。
3.软件系统
512,系统包括实时采集控制、离线分析处理、文件处理、调色板四大模块。在主控命令条中使用相应的按键就可以启动相应的模块,各模块之间可以任意切换。´STM软件系统采用Windows95/98为操作界面,具有使用方便的菜单和工具箱,图象的存储可以采用多种格式,最大分辨率可达512
实时采集控制提供马达开/关、单步进/单步退、自动驱进/自动脱离等马达控制功能,提供任意角度扫描、定标、局域等功能。
离线分析处理提供图像浏览、缩放、线三维、表面三维等多种显示功能,提供斜面校正、平滑、卷积滤波、FFT、边缘增强、反转、两维行平均等图像处理手段,可对图像进行粗糙度、模糊度、剖面线分析及距离和高度定标。
调色板系统包含16种调色板设定,任一种调色板均可由用户在R、G、B三分量上无级编辑,每一种调色板均包含灰度与彩色,信息可任意切换。
文件处理提供实时的屏幕硬拷贝功能,可保存当前任意区域的屏幕内容,提供标准图像格式输出,输出图像可为其它任何通用图像处理软件所识别与处理,以便用户编辑、排版、打印。
四.实验内容
1. 准备和安装样品、针尖
将一段长约3厘米的铂铱合金丝放在丙酮中洗净,取出后用经丙酮洗净的剪刀剪尖,再放入丙酮中洗几下(在此后的实验中千万不要碰到针尖!)。将探针后部略弯曲,插入扫描隧道显微镜头部的金属管中固定,针尖露出头部约5毫米。
将样品放在样品座上,应保证良好的电接触。将下部的两个螺旋测微头向上旋起,然后把头部轻轻放在支架上(要确保针尖和样品间有一定的距离),头部的两边用弹簧扣住。小心地细调螺旋测微头和手动控制电机,使针尖向样品逼近,用放大镜观察,在针尖和样品相距约0.5—1毫米处停住。
2. 金团簇样品图象扫描
启动计算机,打开控制器电源开关。单击桌面的“AJ-1”图标,执行操作软件。此时屏上出现在线软件的主接口,再单击菜单中“显微镜\校正\初始化”,屏上跳出一个选择框,选定“通道零”,然后多次点击“应用”,左边的通道零参数不断变化,选定一个其中变化参数绝对值最小的值,最后单击“确定”。
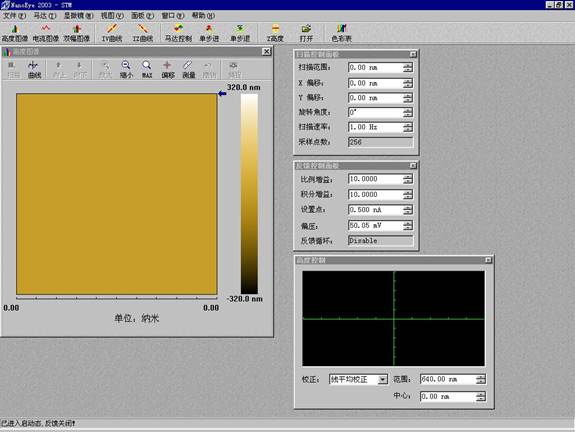
单击菜单“视图\高度图像”,屏上会出现高度图像(H)、Z高度显示(T)、马迖高级控制(A)共三个操作框。然后再将“图像模式”修改成“曲线模式”,同时出现“高度曲线”框。此时的屏显示如图10所示。
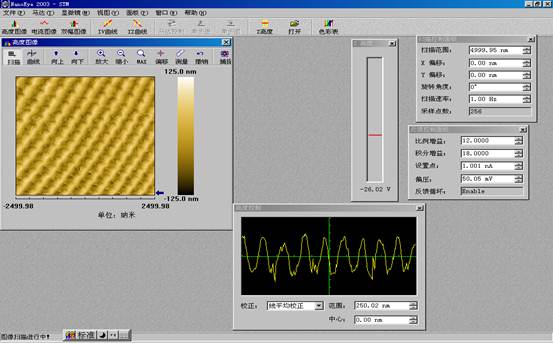
选择“马达控制”,“隧道电流”置为0.3~0.4nA,“针尖偏压”置为250mv,“积分”置为5.0,点击“自动进”。至马达自动停止。 “扫描范围”约为1微米,然后单击“扫描”。点击“调色板适应”以便得到合适的图象对比度。调整扫描角度和扫描速度,同时也可微调面板上的“积分”旋钮(反馈速度)。
手动进针。首先仔细观察样品表面位置并找到镜像小红灯,此时可在样品表面上看到在镜像红灯背景下的镜像针尖。
自动进针。在计算机控制主接口上,单击“马达\高级控制”菜单,再在马达高级控制面板(A)中单击“连续进”,并密切注意观察屏上显示进针情况,待“己进入隧道区马达停止连续进”的提示框出现后,再点击“确定”,此时红线应在-50~+100V之间。然后进行单步操作,即单击马达高级控制面板(A)中的“单步进”,使红线最后调节于中间位置时停止操作,进针结束。最后关闭“马达高级控制面板(A)”图框。
光栅样品的扫描。
A、“扫描控制面板”框中:设置“扫描范囲”为最大;“X偏置”和“Y偏置”为O;设置“旋转角度”为O;“扫描速率”为1Hz左右。
B、在“反馈控制面板”框中:设置“比例增益”为5.0000;“积分增益”为18.0000;设置“设置点”(即隧道电流)为0.500nA;“偏压”为50mV左右;而“反馈循环”为“使能”状态。
C.在“高度控制面板”框中:设置“显示模式”为图像模式;“实时校正模式”为线平均校正;“显示范囲”置于150nm;并设置“显示中心点”为0.00V。
扫描结束后一定要将针尖退回!“马达控制”用“自动退”,然后关掉马达和控制箱。
五.图象处理
(1)平滑处理:将像素与周边像素作加权平均。
(2)斜面校正:选择斜面的一个顶点,以该顶点为基点,线形增加该图象的所有像数值,可多次操作。
(3)傅立叶变换:对当前图象作FFT滤波,此变换对图象的周期性很敏感,在作原子图象扫描时很有用。
(4)边缘增强:对当前图象作边缘增强,使图象具有立体浮雕感。
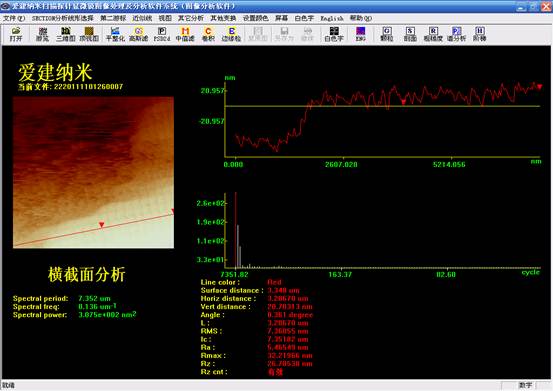
(5) 横切面分析
六。思考和分析。
1. 阐述恒高模式和恒流模式的基本工作原理。
a.恒流模式,如图3(a),利用压电陶瓷控制针尖在样品表面x-y方向扫描,而z方向的反馈回路控制隧道电流的恒定,当样品表面凸起时,针尖就会向后退,以保持隧道电流的值不变,当样品表面凹进时,反馈系统将使得针尖向前移动,则探针在垂直于样品方向上高低的变化就反映出了样品表面的起伏。将针尖在样品表面扫描时运动的轨迹记录并显示出来,就得到了样品表面态密度的分布或原子排列的图象。这种工作模式可用于观察表面形貌起伏较大的样品,且可通过加在z方向的驱动电压值推算表面起伏高度的数值。恒流模式是一种常用的工作模式,在这种工作模式中,要注意正确选择反馈回路的时间常数和扫描频率。
图3 扫描隧道显微镜的两种工作模式
b.恒高模式,如图3(b),针尖的x-y方向仍起着扫描的作用,而z方向则保持绝对高度不变,由于针尖与样品表面的局域高度会随时发生变化,因而隧道电流的大小也会随之明显变化,通过记录扫描过程中隧道电流的变化亦可得到表面态密度的分布。横高模式的特点是扫描速度快,能够减少噪音和热漂移对信号的影响,实现表面形貌的实时显示,但这种模式要求样品表面相当平坦,样品表面的起伏一般不大于1nm,否则探针容易与样品相撞。
2.通过对STM的实际操作,请说明和分析不同的扫描速度对样品表面形貌图的影响情况。
图片会不清晰,出现一些条纹,会影响的但图片的处理。
3.样品偏压和隧道电流的不同设置对实验结果有何影响?
在扫描时,扫描的图片的真实度-与样品的表面实际情况,影响到实验结果的精确度。
4.用STM技术获得的样品表面形貌图实质上它表示的内容是什么?
样品表面原子分布的高低程度。