湖南交通职业技术学院
交通信息学院
实训报告
班级:道控1101班
GPS定位导航
项目小组:第四组
成员:彭玄、杨浩、柯苏耀、邹郧涛
指导老师:陈媛
任务成员分配:
邹郧涛、柯苏耀——用GPS导航仪设置路线并搜索出详细路径
杨浩——记录资料
彭玄——整理、总结、制作world文档
一、打开电源开关,进入主菜单就会弹出五个选项
二、点击地图、设置选项将位置标记点湖南交通职业技术学院(如图所示),然后设置具体路线湖南交通职业技术学院南门——湖南交通职业技术学院东门

三、点击“附近”按钮,选定你所要到达的目的地湖南交通职业技术学院东门

图中标点4为湖南交通职业技术学院南门
图中标点5为湖南交通职业技术学院东门、即湖南交技汽车驾校培训中心
四、进行GPS模拟导航,根据提示语音的走向,到达目的地,本次导航结束
详细路径:组长带领成员在湖南交通职业技术学院南门门口集合,导航会告诉我们 “出南门向东317米左转就是湖南交通职业技术学院东门”。为确定其准确性更改路线,改为出南门向东直走,在超过317米的时候,导航会告诉我们“您错过了湖南交通职业技术学院东门的位置,请退后向左转。”最后根据语音提示,到达目的地。
总结
本次的实训让我们组受到了不同程度的感触,最主要的是我们对GPS导航仪这个仪器的兴趣。
我们很快的就从中摸到了少许皮毛,知道它不仅能够导航、还可以看电视。但是我们在实训的同时我们发现在导航过程中还存在少许不足,仪器的设备有些许的不完善,比例尺有点偏小,以至于许多小地方显示不出来,无法搜索准确地理位置,无法精确地进行定位;版本的更新不到位。
但是为了克服困难,我们想到了一个好办法——现在的智能手机不是都带有手机导航仪的吗!正好我们可以利用智能手机上面的手机导航仪来完成这次的实训,同时上网搜索更多的知识来补充现有GPS导航仪的不足,也让我们了解到了GPS导航仪的优缺点:优点——可以准确的定位,还可全天候、全天时工作,精度高.并设置好所去的地方路线的最短距离。极大的方便我们的学习、工作,生活。缺点——在高大的楼房附近或室内停车场,这时GPS就失去了作用。GPS的天线与主机是分离安装的,使用时要求不能被剪线或断电,当天线被金属薄膜覆盖时,GPS也就失去了作用,但这只是暂时的。
学习使用并了解GPS导航仪也为我们以后从事的工作奠定了一个基础。
第二篇:卫星导航定位实验报告
某 大 学
实验报告
课 程: 卫星导航定位 B
系 别: 测绘工程学院
班 级: 测绘102
姓 名:
学 号:
纯手打啊,熬夜到三点赶出来的,共享下
实验一 GPS静态数据采集与处理
一、实验目的和要求
1. 熟悉GPS静态相对定位原理 。
2. 通过 GPS 数据采集与处理实习,比较熟练地掌握 GPS 接收机的使用。
3. 初步掌握 GPS网的布设、外业实测和数据处理的基本技能,培养 GPS 测量的初步实践能力。
4. 学会TTC后处理软件的简单使用。
二、实验仪器
GPS接收机一台套,内含GPS接收机一台,手部一个,电池两块,3米钢卷尺一把,基座一个(含轴心),三脚架一个。
三、实验步骤
1. 安置仪器:在合适点上放置三角架,安放基座和天线。
2. 天线与主机的连接(静态观测)。
3. 熟悉开机、关机、量取天线高;主机面板菜单的各项功能;输入点号、天线高,查看接收机工作状态等。
4. 在采集静态数据时,需要做好记录,包括每台GPS各自所对应的点位、不同时间段的静态数据对应的点位、采集静态数据时GPS的天线高。
5. 用GPS采集完静态数据后,就要对所采集的静态数据进行处理,得出各个点的坐标,进行网平差计算。
6. 完成实验报告。
四、数据处理结果与精度分析 (以下数据来自其他途径,抱歉,如有侵权请告知,只是为了保证原文件的完整性)
1. 在WGS84系统输入基线 (向量及标准差)
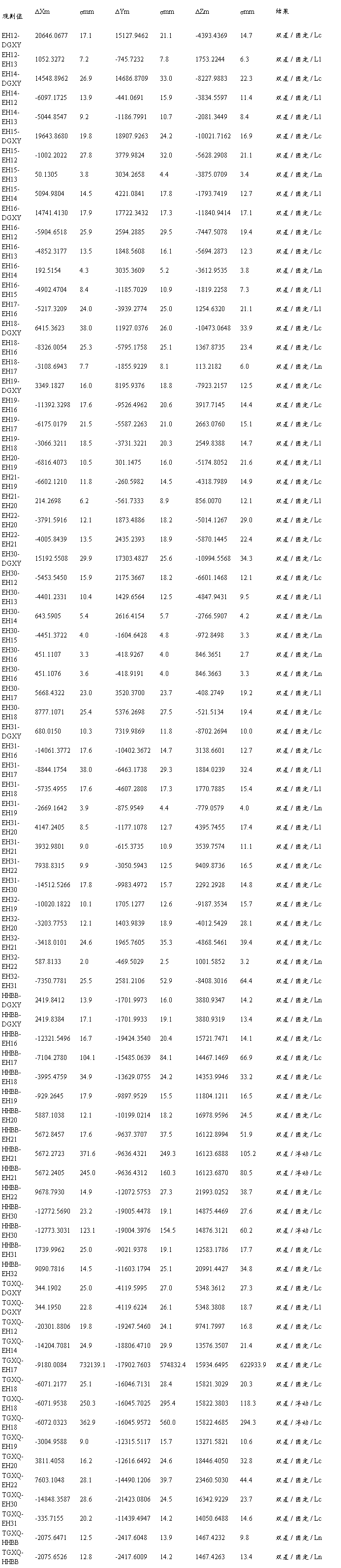
- 静态基线的标准差已经乘了一个因子 10.00.
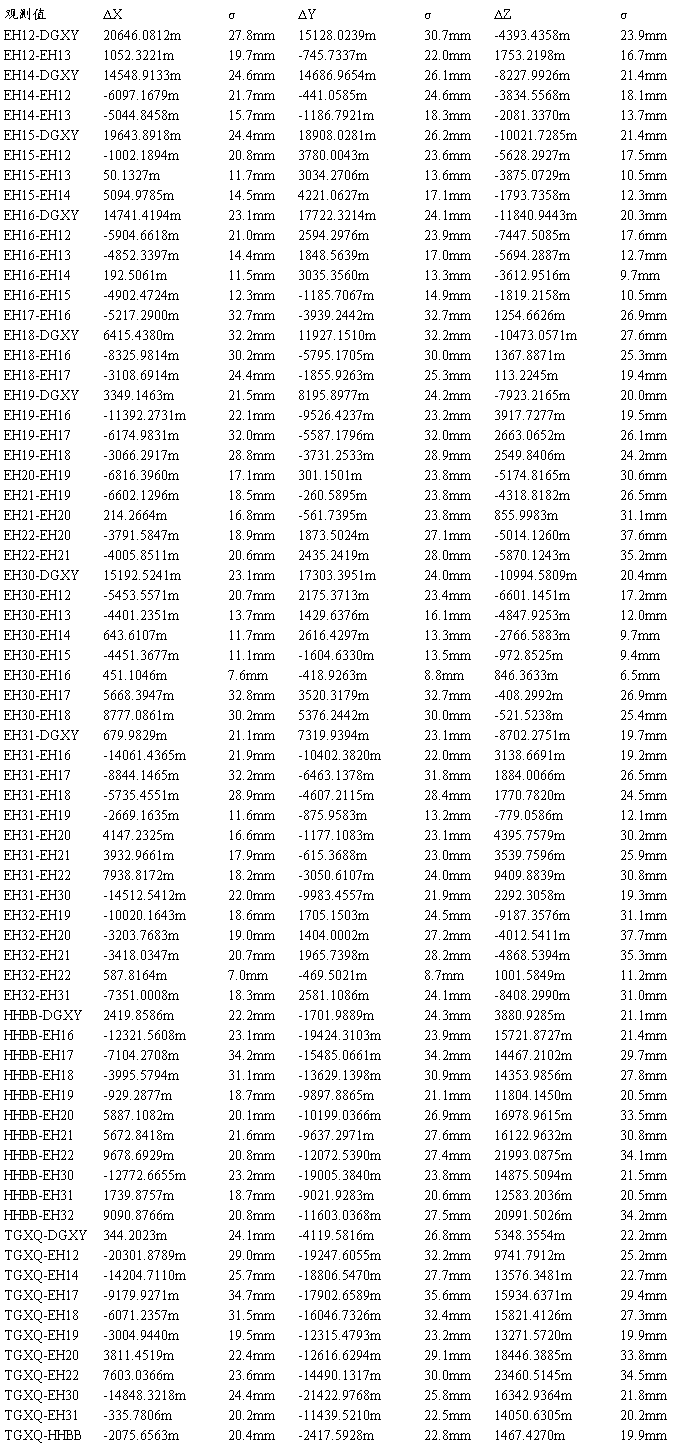
无约束平差:
1. WGS84系统平差基线 (基线向量及标准差)
2. 基线残差 (残差及标准残差)

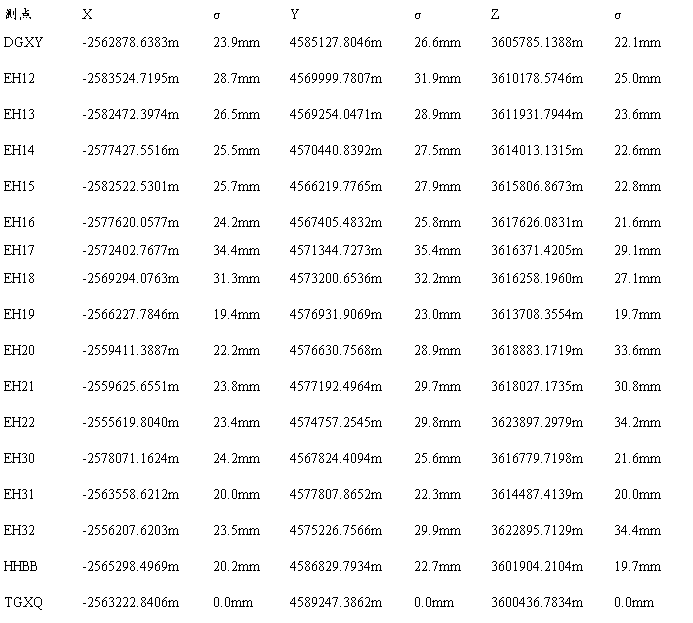
3. 区域坐标系上平差测点 (平面坐标及标准差)
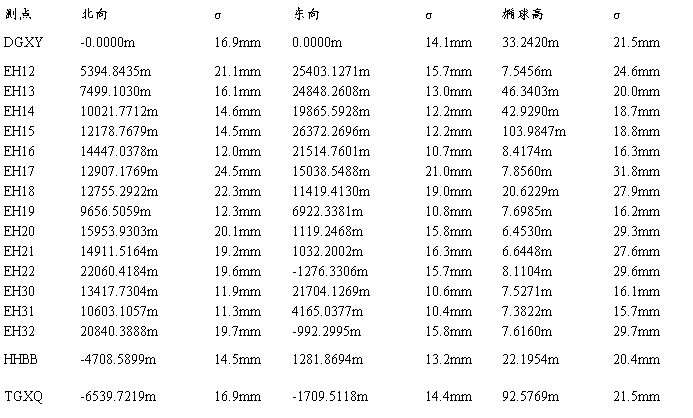
- 参考球面半径是 6372000.000 m.
- 系统原点位于点 DGXY.
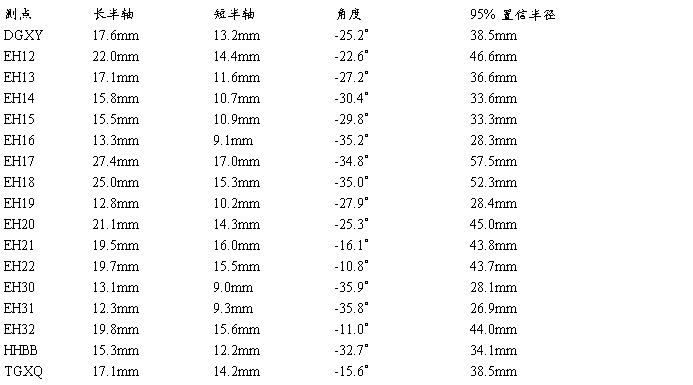
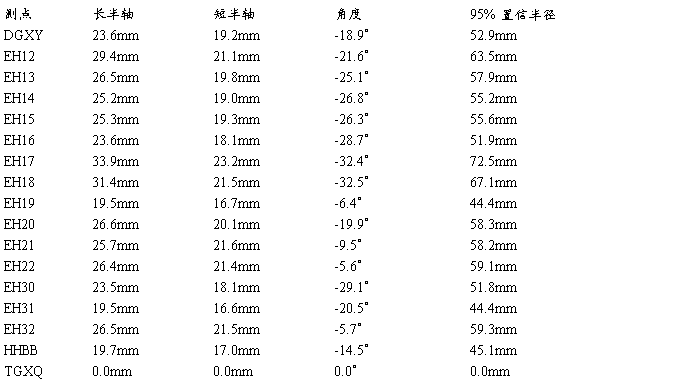
4. 平差点误差椭圆
约束平差:
1. WGS84控制点输入 (直角坐标及标准差)

2. WGS84上平差测点(笛卡尔坐标及标准差)
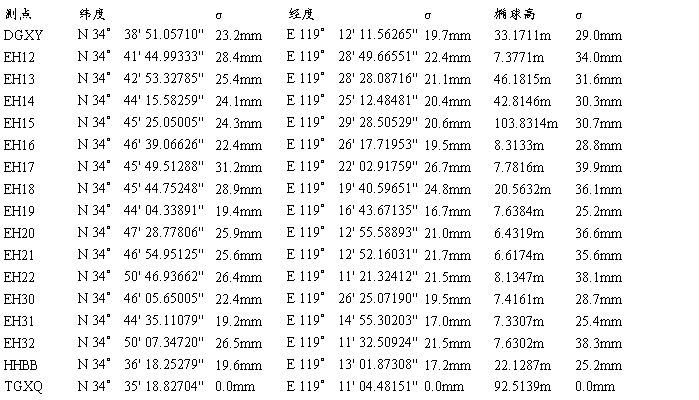
3. WGS84 (地理坐标及标准偏差)上的平差点
4. 平差点误差椭圆
五、实验体会
实验第一天进行静态数据采集,实际看来都还是第一次接触GPS接收机,显然是人人兴趣高涨。在郭老师的带领下认真的学习接收机的各个部件和各指示灯的用途,例如状态指示灯、数据链灯、卫星/蓝牙灯、电源灯,开机关机效果,由于没有使用说明书,我们也只能一边自己摸索一边听老师口述操作步骤,记得关于静态和动态的指示灯的切换就争论了很久,即便如此,我们对于GPS接收机不是一般的陌生,却也打击不倒同学们的积极性,我们在不断失败中渐渐摸清了接收机的脾性,而不至于像刚开始接触一样闹出多大笑话。唯一有几分熟悉的就是手部和GPS接收机之间的蓝牙连接,就像手机或者电脑的蓝牙连接一样,步骤简单易记。
GPS静态测量,是利用测量型GPS接收机进行定位测量的一种。主要用于建立各种级别的控制网。进行GPS静态测量时,认为GPS接收机的天线在整个观测过程中的位置是静止,在数据处理时,将接收机天线的位置作为一个不随时间的改变而改变的量,通过接收到的卫星数据的变化来求得待定点的坐标。在测量中,GPS静态测量的具体观测模式是多台接收机在不同的测站上进行静止同步观测,时间由40分钟到十几小时不等。像我们组就是和班长那一组进行同步,正如任课老师阐述的那样,只要掌握了其工作原理,具体外业测量工作是十分简单的,只需要保证几台接收机的同步进行,设置好接收机配置要求后就可以放在一边进行接收了,因为是静态数据采集,工作的仅仅是卫星而已,的确比像其他什么全站仪经纬仪的轻松许多。不过仪器也不能长时间暴露在骄阳下,还要保护好天线,防潮、防晒,其实还有一个重要因素很多人包括我自己都没有考虑到,那就是在接受机接受数据的过程中,不得在接受机旁接打手机,不然会影响GPS仪器工作。
根据我的了解和记忆,GPS接收机主要由 1、GPS接收机天线单元;2、GPS接收机主机单元;3、电源三部分组成,天线由接收机天线和前置放大器两部分所组成。天线的作用是将GPS卫星信号的极微弱的电磁波能转化为相应的电流,而前置放大器则是将GPS信号电流予以放大。为便于接收机对信号进行跟踪、处理和量测,对天线部分有以下要求:天线与前置放大器应密封一体,以保障其正常工作,减少信号损失;能够接收来自任何方向的卫星信号,不产生死角;有防护与屏蔽多路径疚的措施;天线的相位中心保持高度的稳定,并与其几何中心昼一致。接收机的主要任务是:当GPS卫星在用户视界升起时,接收机能够捕获到按一不定期卫星高度截止角所选择的待测卫星,并能够跟踪这些卫星的运行;对所接收到的GPS信号,具有变换、放大和处理的功能,以便测量出GPS信号从卫星到接收天线的传播时间,解译出GPS卫星所发送的导航电文,实时地计算出测站的三维位置,甚至三维速度和时间。GPS信号接收机不仅需要功能较强有力的机内软件,而且需要一个多功能的GPS数据测后处理软件包。接收机加处理软件包,才是完整的GPS信号用户设备。
到最后我们与一班的同学互换了仪器,虽然清楚了老师讲解的具体观测和接收步骤,但是对于这些仪器完全不感冒的我,根本就弄不明白哪台仪器是哪种型号,好在有小组成员的帮助,即使不能记住所用的GPS接收机的型号,但至少能对应两种接收机的使用方法。当然这次的实验只能算是对GPS接收机的简单认识,并不能真正掌握其具体复杂操作,因为毕竟没有多多练习,或者实地测量。
本次实验还有一个难点就是软件TTC的应用,同样是完全陌生的事物,甚至连软件的安装就很费时费力,至少有很多同学都没有安装完成,不是兼容性问题就是缺少某些文件,到最后只能用别人已经安装过的电脑来进行练习,新建,解算,修改,每一步都不简单,我也只能看着其他同学熟练操作,到自己就完全不会了。不过到这里也算是对于GPS学科有了一个更深入的认识,加上联系到的平差知识和大地测量,感觉收获不小。
实验二 GPS动态数据采集与处理
一、实验目的和要求
1. 掌握RTK的测量原理和作业流程。
2. 学会RTK手簿的使用。
3. 掌握 RTK 基准站和流动站的设置。
二、实验仪器
GPS接收机两台,一基准站,一移动站。
三、实验步骤
(一).GPRS作业模式
1.打开后盖,插入SIM卡。
2.HCGPSset:连接蓝牙,正常模式,自启动基准站,Port 2+GPRS/CDMA,应用,退出。
3.接收机重新开机。
4.HCGPRS只需一次,使用蓝牙连接,GPRS模式,设置工作模式:GPRS。
UDP一对多,基准站,输入IP端口,应用,退出。
(二)RTK模式
装入电池,开机。
1.RTKCe进入,配置,手簿端口配置,蓝牙连接,退出。
2.HCGPSset(一次):使用蓝牙,打开端口,手动。正常模式,自启动基准站,Port 2+GPRS/CDMA,应用,退出。
3.重新开关机。
4.HCGPRS(一次):使用蓝牙连接,GPRS模式,设置工作模式:GPRS。获取移动站,基准站ID,应用,退出。
5. 配置
1).文件,新建。任务名,坐标系统,beijing-54,接受。
投影,中央子午线,确定,文件保存。
2).配置,移动站参数,选项,广播格式,RTCM 3.0。
天线高,高度角,天线类型。接受。
3).配置,移动站参数,内置VRS移动站。
4)测量,启动移动站接收机。固定,测量。
6.校正
基准站架在已知点时,启动“工程之星”,选择“基准站架设在已知点”,点击“下一步”, 输入基准站架设点的已知坐标及天线高,并且选择天线高形式(斜高),输入完后即可点击“校正”。,检查无误后 “确定”校正完毕。基准站架在未知点时,选择“基准站架设在未知点”,再点击“下一步”。输入当前移动站的已知坐标、天线高和天线高的量取方式,再将移动站对中立于已知点上后点击“校正”,系统会提示是否校正,“确定”即可。
注意:此处天线高为移动站主机天线高,形式一般为杆高,为一固定值 2m。若选“直高”时天线高为 2.065m。
(三)定点测量。
目标点测量
当以上步骤设置完毕后,可以按键盘上的A键进行目标点测量,然后按Enter键保存。测量已有的点时,使碳素对中杆的水中气泡对中,将手簿上测得的坐标高程与原有的坐标高程比较。
移动站定点,基准站接收数据并保存。
(四).数据传输
在野外采集的数据都自动保存在手簿的“我的电脑→Flashdisk→Jobs”中 。我们需要的测量成果文件是以 .dat 为后缀的文件,此文件自动存储在我们新建工程名文件下的 DATA 文件中。内业成图。
(五).完成实验报告。
注意事项
1.在RTK测量时,要按照测量规范,流动站和基准站尽量在5公里范围之内。
2.基准站应架设在视野开阔,视场15°以内没有障碍物的已知点上,若在丘陵山区,基准站尽量架设在高处,使得基准站发射的信号能被流动站接收到。若已知点难以满足作为基准站的需要,可以将基准站架设在位置点上,校正时选择“基准站架设在未知点”,找三个已知点进行校正。
3.确保基准站和流动站的差分格式和电台频道是相同的。
4.在校园内进行RTK测量时,基准站和流动站间的距离很短,测量目标点的时候要注意随时查看是否是固定解,误差是否足够小,满足精度要求,只保留固定解的记录。
四、实验结果与分析
1.点位坐标(本组第四组)
Base:p1,132100, 428044.010, 3831165.963, -100.130
p1,132100, 428050.844, 3831221.181, -101.653
p2,132100, 428050.502, 3831220.135, -101.590
p3,132100, 428041.012, 3831206.868, -101.667
p4,132100, 428037.596, 3831207.815, -101.651
p5,132100, 428035.997, 3831219.123, -101.691
p6,132100, 428030.384, 3831218.387, -101.705
p7,132100, 428015.450, 3831216.116, -101.699
p8,132100, 428016.089, 3831215.153, -101.474
p9,132100, 428028.939, 3831205.050, -101.671
p10,132100, 428032.141, 3831207.054, -101.661
p11,132100, 428026.876, 3831202.387, -101.659
p12,132100, 428013.776, 3831212.773, -101.689
p13,132100, 428015.889, 3831196.837, -101.713
p14,132100, 428025.504, 3831198.189, -101.661
p15,132100, 428024.813, 3831198.830, -101.493
p16,132100, 428025.853, 3831201.982, -101.514
p17,132100, 428014.715, 3831211.208, -101.484
p18,132100, 428017.946, 3831208.863, -101.470
p19,132100, 428016.408, 3831207.547, -101.232
p20,132100, 428015.818, 3831204.385, -101.481
p21,132100, 428016.993, 3831199.870, -101.212
p22,132100, 428016.550, 3831197.918, -101.530
p23,132100, 428032.226, 3831196.456, -101.651
p24,132100, 428038.479, 3831193.300, -101.656
p25,132100, 428039.310, 3831200.057, -101.655
p26,132100, 428043.891, 3831205.002, -101.657
p27,132100, 428044.923, 3831205.017, -101.497
p28,132100, 428046.852, 3831202.169, -101.563
p29,132100, 428046.472, 3831201.239, -101.656
p30,132100, 428045.540, 3831202.861, -101.665
p31,132100, 428056.007, 3831202.775, -101.697
p32,132100, 428055.324, 3831203.241, -101.500
p33,132100, 428054.036, 3831204.567, -101.293
p34,132100, 428053.893, 3831210.312, -101.557
p35,132100, 428053.108, 3831212.100, -101.301
p36,132100, 428053.274, 3831216.930, -101.497
p37,132100, 428053.641, 3831218.603, -101.678
p38,132100, 428049.174, 3831220.110, -101.534
p39,132100, 428043.034, 3831219.613, -101.502
p40,132100, 428036.993, 3831218.637, -101.545
p41,132100, 428029.931, 3831217.368, -101.529
p42,132100, 428023.543, 3831216.673, -101.539
p43,132100, 428017.312, 3831215.802, -101.543
p44,132100, 428030.149, 3831206.833, -101.521
p45,132100, 428030.456, 3831206.185, -101.669
p46,132100, 428039.398, 3831207.982, -101.517
p47,132100, 428039.401, 3831207.531, -101.674
p48,132100, 428047.294, 3831195.921, -101.659
p49,132100, 428047.885, 3831195.180, -101.501
p50,132100, 428056.153, 3831196.340, -101.541
p51,132100, 428056.821, 3831197.130, -101.662
p52,132100, 428055.938, 3831192.147, -101.349
p53,132100, 428057.292, 3831189.306, -101.529
p54,132100, 428056.425, 3831186.747, -101.239
p55,132100, 428055.747, 3831183.613, -101.475
p56,132100, 428055.754, 3831183.568, -101.482
p57,132100, 428058.119, 3831182.479, -101.450
p58,132100, 428057.858, 3831176.941, -101.249
p59,132100, 428059.462, 3831174.389, -101.514
p60,132100, 428060.238, 3831173.615, -101.686
p61,132100, 428054.205, 3831173.562, -101.526
p62,132100, 428043.707, 3831172.100, -101.496
p63,132100, 428042.991, 3831171.122, -101.659
p64,132100, 428042.354, 3831177.328, -101.557
p65,132100, 428042.546, 3831179.232, -101.495
p66,132100, 428041.442, 3831186.341, -101.542
p67,132100, 428040.622, 3831186.917, -101.646
p68,132100, 428043.770, 3831188.905, -101.643
p69,132100, 428044.564, 3831188.628, -101.510
p70,132100, 428046.032, 3831191.860, -101.636
p71,132100, 428046.788, 3831191.569, -101.528
p72,132100, 428035.246, 3831186.125, -101.638
p73,132100, 428031.816, 3831187.104, -101.635
p74,132100, 428031.045, 3831186.687, -101.502
p75,132100, 428029.174, 3831188.802, -101.650
p76,132100, 428026.301, 3831192.727, -101.644
p77,132100, 428016.794, 3831191.264, -101.720
p78,132100, 428018.823, 3831187.191, -101.246
p79,132100, 428019.625, 3831181.610, -101.322
p80,132100, 428021.564, 3831178.289, -101.538
p81,132100, 428019.894, 3831173.996, -101.537
p82,132100, 428021.244, 3831171.576, -101.358
p83,132100, 428020.177, 3831167.714, -101.679
p84,132100, 428037.449, 3831170.350, -101.641
p85,132100, 428025.901, 3831200.116, -101.634
2.利用CASS软件成图部分

五、实验体会
没想到这么快就进行动态数据采集实验了,上次的静态数据采集十分简单,相对而言TTC软件计算却是最伤脑筋,不过现今看来除了RTK动态测量配置很繁琐,实施起来也是不甚困难,只需一个基准站一个移动站就能采集点位信息数据,的确相对普通的全站仪控制测量占有很大有优势,工作量小,明显效率高,第一次实验,对主楼前的花坛只用了一个多小时就全部完成。不过由于是两个班级一起上课,仪器不够,我们二班还要等一班的同学先行测完才能接手,不然我们也可以更早完成任务,而不是到了晚饭时间才结束。
之前看老师操作一步步设置基准站和移动站,即使认真听着做笔记都来不及,还是自己提前看过教学视频有所领悟,否则那些关于各项配置的操作完全不懂,根本记不下,紧赶慢赶加上过后的自己尝试操作才略有小得。果然越是深入了解GPS学科,越是觉得它的困难。GPS定位的原理是GPS 卫星发射的测距信号和导航电文,导航电文中含有卫星位置的信息,用户用GPS接收机在某一时刻接收三颗或三颗以上的GPS卫星,测出测站点(GPS天线中心)到卫星的距离并解算出该时刻卫星的空间位置根据距离,并解算出卫星的空间位置,根据距离交会法求测站点坐标.其基本思想为:在基准站上安置一台GPS 接收机,对所有可见卫星进行连续观测并将其观测数据通过无线电传输设备实时地发送给用户观测站,用户站在接收GPS卫星信号的同时,通过无线电接收机设备接收基准站传输的观测数据,实时计算测站点的三维坐标。在作业过程中,在GPS接收机满足作业精度要求的情况下,测量的主要误差源是多路径误差、周跳和点位的对中误差。作业中应尽量避免它们的发生并减少其误差。显然,在本次外业过程中都没有考虑各种误差,只是简单的让水准气泡居中。RTK测量除了要有足够的卫星数和卫星具有良好的几何分布外,还要求基准站与流动站的数据通讯必须良好。
正是炎炎夏日,无论轻松与否,一直顶在烈日下也是很难熬的一件事,所以组员们商量着一定要尽量提早结束,在小路灯,小警示牌的选取上也是略去了。尽管如此,我们的效率并不高,还是拖到了最后几个组还仪器的,想来也就是与一班交接仪器的时候太没着急,具体在采集数据上的确也不慢。
导出数据后,CASS成图虽是驾轻就熟,但是发现电脑里竟然卸掉了南方CASS软件,想要装上去还要重新安装AUTOCAD,出了点小插曲,花了几个小时也没能装上。不过在此期间也在思考关于成图的具体步骤,如果忘掉了还要从头学习了。装不成软件无法绘成图输出,只能借用同学电脑了,虽然麻烦一点,任务还是不能落下。
通过本次实验,让我更深入的了解了GPS测量工作,RTK实时动态工作模式,这是课本的具体化,实际化,这样能更好的理解了GPS动态测量的特点,如作业效率高,在一般的地形地势下,高质鼍的RTK设站一次即可测完4kin半径的测区,大大减少了传统测量所需的控制点数量和测置仪器的“搬站”次数,仅需一人操作,在一般的电磁波环境下几秒钟即得一点坐标,作业速度快,劳动强度低,节省了外业费用,提高了劳动效率。再如,定位精度高.数据安全可靠,没有误差积累。只要满足RTK的基本工作条件,在一定的作业半径范围内(一般为4km),RTK的平面精度和高程精度都能达到厘米级。降低了作业条件要求RTK技术不要求两点间满足光学通视。只要求满足。电磁波通视”,因此,和传统测量相比,RTK技术受通视条件、能见度、气候、季节等因素的影响和限制较小,在传统测量看来由于地形复杂,地物障碍而造成的难通视地区,只要满足RTK的基本工作条件,它也能轻松地进行快速的高精度定位作业。
虽然实验时间并不长,但是刚接触并初步掌握RTK实测技术,也是一种进步,而RTK在实际测量过程中有很多优秀的方面,很大程度上满足了我们对降低作业强度,提高工作效率,缩短设计周期的要求,所以现在想来学好GPS实测技术是十分有益的,无论将来能不能应用到今天所学,但是知识是已经学到了,丰富了自身修养。