转子动平衡实验报告
一 实验目的
1. 巩固转子动平衡知识,加深转子动平衡概念的理解。
2. 掌握刚性转子动平衡实验的原理及基本方法。
3.了解动平衡试验机的组成﹑工作原理,通过参数化和可视化的方法,观察转子动平衡虚拟实验的平衡效果。
二实验设备及工具
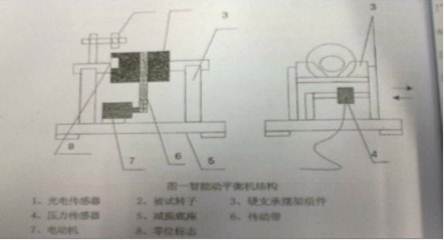
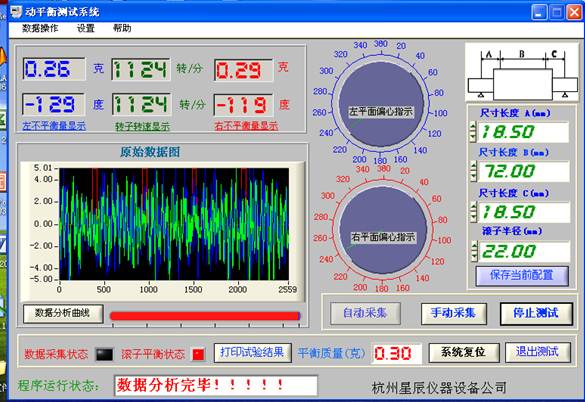
DPH—I型智能动平衡机结构如图一所示。测试系统由计算机,数据采集器﹑高灵敏度有源压电传感器和光电相位传感器等组成。
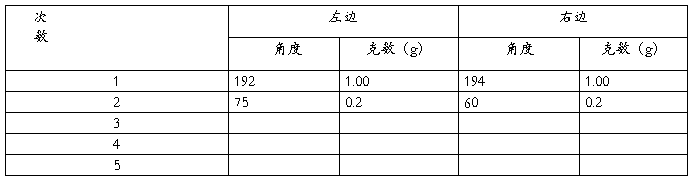
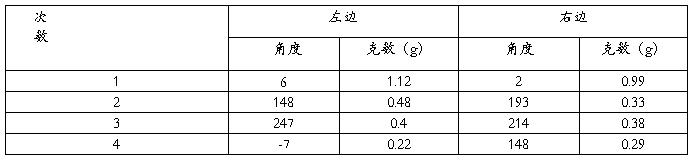
三 实验记录及结果
四 思考题
1 转子(试件)在什么情况下作静平衡?什么情况下作动平衡?
答:定义
1)静平衡:在转子一个校正面上进行校正平衡,校正后的剩余不平衡量,以保证转子在静态时是在许用不平衡量的规定范围内,为静平衡又称单面平衡。
2)动平衡:在转子两个校正面上同时进行校正平衡,校正后的剩余不平衡量,以保证转子在动态时是在许用不平衡量的规定范围内,为动平衡又称双面平衡。
转子平衡的选择与确定
如何选择转子的平衡方式,是一个关键问题。其选择有这样一个原则:只要满足于转子平衡后用途需要的前提下,能做静平衡的,则不要做动平衡,能做动平衡的,则不要做静动平衡。
2 作往复运动或平面运动的构件,能否用动平衡试验机将其不平衡惯性力平衡?为什么?
可以用动平衡试验机将其不平衡惯性力平衡
五 收获和体会
做实验时虽然理论基础但同需要团队合作,操作时精度也需要很准确,即使只差1g也会对结果产生很大的影响
第二篇:转子动平衡实验报告
转子动平衡实验报告

一 实验目的
1, 巩固转子动平衡知识,加深转子动平衡概念的理解;
2, 掌握刚性转子动平衡实验的原理及基本方法。
3, 了解动平衡试验机的组成,工作原理,通过参数化和可视化的方法,观察转子动平衡虚拟实验的平衡效果。
二实验设备及工具
DPH-I型智能平衡机构,测试系统由计算机,数据采集器,高灵敏度有电力传感器和光电相位传感器等组成。
三 动平衡实验截图
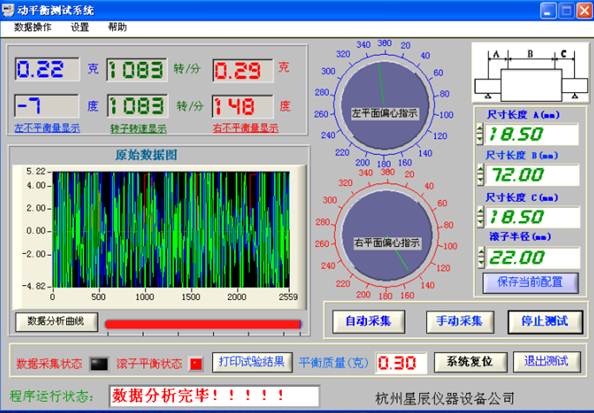
动平衡测试系统
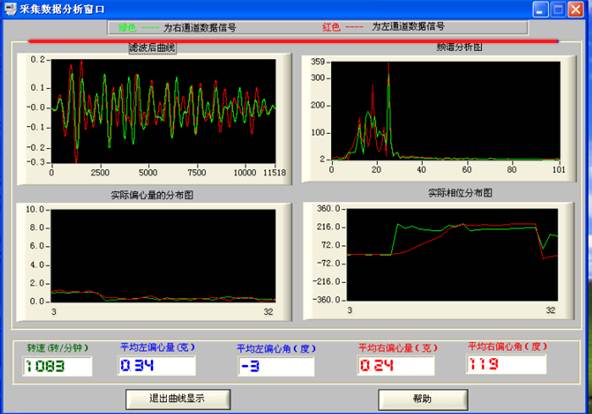
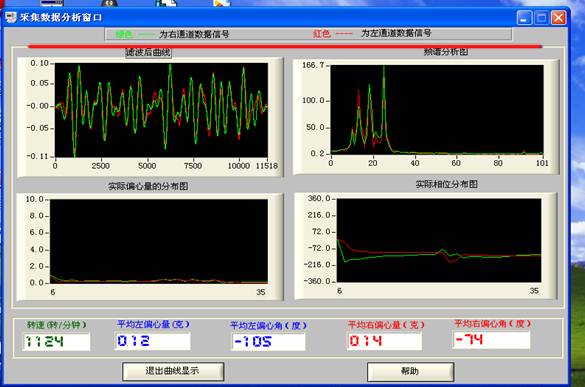
采集数据分析窗口
四 实验记录及结果
五 思考题
1 转子(试件)在什么情况下作静平衡?什么情况下作动平衡?
答:(1)静平衡:在转子一个校正面上进行校正平衡,校正后的剩余不平衡量,以保证转子在静态时是在许用不平衡量的规定范围内,为静平衡又称单面平衡。
(2)动平衡:在转子两个校正面上同时进行校正平衡,校正后的剩余不平衡,以保证转子动态时是在许用不平衡量的规定的范围内,为动平衡又称双面平衡。
2 作往复运动或平面运动的构件,能否用动平衡试验机将其不平衡惯性力平衡?为什么?
答:不能,因为动平衡试验机是为转子(回转体)设计的,对于存在有往复运动或平面运动的构件,其惯性力和惯性力矩不可能在构件内部消除,,但所有构件上的惯性力矩可以合成为一个通过机构质心并作用于机架上的总惯性力和惯性力矩。因此,这类平衡问题必须就整个机构研究,设法使其总惯性力力矩在机架上得到完全或部分平衡,所以这类平衡问题又称机构在机架上的平衡。
六 收获和体会
答:通过转子动平衡实验,我们更加了解到了怎样消除惯性力对机构的不利影响:噪音,震动等,对于不同的试件,我们通常根据试件的直径D与两校正面的距离b:
(1) D/b≥5时,试件只需满足静平衡,相反,就必须作动平衡。
(2) 然而据使用要求,只要满足转子平衡后用途要求的前提下,能做静平衡的,就不要做动平衡,能做动平衡的,就不要作静平衡。因为静平衡比动平衡更容易,省工,省力,省时间,省费用。