20xx年飞思卡尔智能车大赛特等奖技术报告(节选) 作者:李嵩 孙文静 瞿佳璐 上海大学
车模的机械部分是影响其行驶性能最直接的部分,其重要性不言而喻。一个不良的机械系统会增加控制的难度,会为车模的速度提升带来障碍。因此,车模的机械性能应该是优先考虑的问题。 摄像头的安装
大量事实证明,重心越低越好。为降低重心,并同时保证图像视野宽度,最好的方法就是使用旋转摄像头。在08年的第三届比赛中,摄像头-舵角连动机构在RacerX的车上取得了出人意料的成效,但也暴露出了一些机构固有的问题,其中包括:机构虚位导致摄像头定位不准,摄像头在中位附件容易振荡。因此需要对机构进行改良。改良方法如下。
(1) 增加自动回正机构,给旋转摄像头提供自动回正力矩,以减小机构虚位。
(2) 给旋转摄像头机构调静平衡,减少车模在过弯过程中离心力对摄像头的影响。
(3) 用滑槽代替原本中间的连杆球头,为旋转摄像头在中位附近制造一段死区,使车模在打小角度舵角时,摄像头不转,从而增加车模在直线和小S弯中的稳定性。

改良的机构三维图如图2所示。
综上所述,这是一个带有死区及自动回正机构的旋转摄像头机构。此外,在控制方面,可以设法检测出摄像头旋转的角度,并将其反馈在控制算法里。检测摄像头角度的方法大致有以下两种:
(1) 在车头划线做标记,用摄像头检测车头标记,来判断自己所转的角度。
(2) 由于舵机S3010是模拟舵机,其中是用电位器来反馈舵角的,因此可以将此电位器的信号飞线引出来,用单片机内部AD进行采集。
偏振镜的使用
由于追求更好的机械性能,我们把摄像头降低,达到降低重心的目的。但是由此带来了反面的影响,那就是图像的形变以及受到跑道面反光的影响。跑道上的黑线由于反光原因,摄像头检测的数据丢失黑线。为了解决反光导致检测不到黑线的问题,我们利用了偏振镜。偏振镜的作用其实是过滤掉某个角度的偏振光,实现检偏的作用。当自然光经过跑道面以后,会产生偏振光,这反射的偏振光会影响到图像的采集。通过在摄像头前面安装偏振镜片,并且调整偏振镜片的检偏角度,可以得到几乎无反光影响的图像。如图3所示。

不过,使用偏振镜也会带来问题。虽然偏振镜能把跑道的偏振光过滤掉,但同时把环境的自然光强度降为原来光强的二分之一,也就是说通过偏振镜之后光线变暗了。在光线强度较大的时候不会有太大影响,但是如果环境光比较弱的时候,加了偏振镜会使摄像头感应的光线更弱,而大多数摄像头具有
自动曝光功能,在光线昏暗时,摄像头会自动增加曝光时间,导致图像更容易模糊。因此,使用偏振镜要合理权衡利与弊才能发挥偏振镜的作用。
图像采集模块
清晰稳定的图像是一切的基础,因此今年我们在摄像头选择和多种采集方案的测试上花了很多功夫。 摄像头选择
由于CMOS摄像头重量轻、功耗低,因此依然十分有吸引力,所以我们对CMOS与CCD再次进行对比测试,测试用的CMOS摄像头为康美迪亚的1/3 CMOS,图4为CMOS摄像头与CCD摄像头的原始图像,可以看到CMOS图像中的噪点远远多于CCD的图像。并且CMOS摄像头在拍摄运动图像时容易发生模糊。

动态图像模糊主要是在光线较暗的环境下,为了保持图像亮度,摄像头自动将曝光时间增大所致。要彻底避免图像模糊情况的出现,就要手动设置摄像头曝光时间,于是我们又测试了1/3数字摄像头OV7620,通过SCCB将摄像头设置到手动模式,手动修改其曝光时间。 图像采集方案
今年我们测试了很多种采集方案,首先由于更换了主频更高的S12XS128,我们对其内部AD又进行了测试,结果很失望,尽管主频增高,最高精度从10bit增加到了12bit,但是AD的转换时间并没有多少改善,88MHz主频下行像素在80左右。之后我们又测试了外部二值化采集、数字摄像头采集、外部AD加LM1881采集、视频解码芯片采集。其中视频解码芯片图像质量最好,并且有图像预处理电路,但由于实验电路还在测试阶段,本次比赛并没有启用,仍然延用了去年的外部AD采集方案。
电机驱动模块
去年我们使用SI4430,模仿电子调速器制作了驱动电路,取得了不错的效果,但是对于能耗刹车的刹车能力始终存在争议,因此我们对能耗刹车和反压刹车做了对比测试。
参考第三届上海交大SpeedStar队的技术报告,我们使用BTS7970制作了驱动电路,其原理如下。该电路有一路PWM输入,两根I/O线作为模式选择线,可以有正转、反转、能耗刹车三种工作模式。
我们使用“白骑士”模型车的驱动电路与上述电路(图5)进行对比测试,图6是车模的速度曲线,其中浅色的线为给定速度,深色的线为实际速度,纵坐标单位为mm/s,横坐标单位为帧(即40ms)。
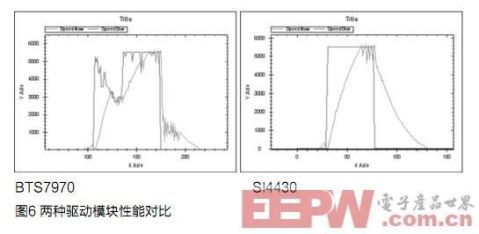
比较以上速度曲线,两种驱动在加速能力上相差不大,而反压刹车的减速能力远高于能耗刹车。因此,可以得出结论,对于比赛所提供的380电机而言,10mW左右内阻的驱动电路已经足以满足要求,反压刹车的效果是远好于能耗刹车的,而用BTS7970制作驱动电路是一个简单易行方案。
SD卡
SD卡实时存储系统是我们去年率先提出和使用的辅助调试手段,极大地提高了调试效率,今年我们继续延用并对SD卡存储的速度和稳定性做了改进。去年我们使用的MC9S12DG128,在设计之初主要考虑到SD卡为3.3V系统,而单片机为5V系统,之间需要逻辑电平转换,为此我们在设计SD卡电路时在单片机输入端加了三极管放大。今年我们使用的MC9S12XS128可以支持3.135V到5.5V的宽电压供电,我们使用3.3V供电就可以实现与SD卡接口的直连,这样可以提高读写SD卡的稳定性。
参考文献:
[1] 邵贝贝. 单片机嵌入式应用的在线开发方法[M]. 北京:清华大学出版社. 20xx年10 月第1 版
[2] 卓晴, 黄开胜, 邵贝贝. 学做智能车[M]. 北京:北航出版社, 2007.3
[3] 林辛凡, 李红志, 黄 颖. 清华三角洲队技术报告[R].2008
[4] 秦召兵,师恩义,王力. 东北大学猎豹队技术报告[R].2008
[5] 胡晨晖, 陆佳南,陈立刚.上海交通大学CyberSmart 队技术报告[R].2008
第二篇:飞思卡尔智能车大赛报告
第一届“飞思卡尔”杯全国大学生 智能汽车邀请赛
技 术 报
学 校:哈尔滨工程大学
队伍名称:急速冰灵
参赛队员:隋龙
张智
汪汉生
带队教师:朱齐丹 告
关于技术报告和研究论文使用授权的说明
本人完全了解第一届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:
带队教师签名:
日 期:
I
目录
第一章 引言 ···················································································································· 1
1.1智能汽车制作概述 ······························································································ 1
1.2控制算法概述 ····································································································· 1
1.3引用文献概述 ····································································································· 1
1.4报告的主要内容·································································································· 2
第二章 模型车机械部分安装及改造 ··············································································· 3
2.1传感器的安装 ····································································································· 3
2.2 主控板的安装 ···································································································· 3
2.3光电码盘的安装·································································································· 4
第三章 电路设计说明 ···································································································· 5
3.1电源电路 ············································································································ 5
3.2 电机驱动电路 ···································································································· 5
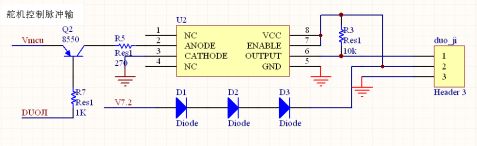
3.3 舵机驱动电路 ···································································································· 6
3.3.1 电源电路 ································································································· 6
3.3.2信号连接电路··························································································· 6
3.4 主控办接口 ········································································································ 7
3.5 传感器电路 ········································································································ 7
第四章 智能车的控制 ···································································································· 9
4.1 主要代码分析 ···································································································· 9
第五章 车体调速方法 ·································································································· 11
5.1 智能车的质量对性能的影响 ············································································· 11
5.2闭环调速 ·········································································································· 12
5.3变速前进 ·········································································································· 12
第六章 结论 ·················································································································· 14 参考文献 ······················································································································· 15 附 录 ··························································································································· I A:程序流程 ············································································································· I B:程序源代码········································································································· II
II
第一章 引言
1.1智能汽车制作概述
为了不影响智能车的整体性能,在制作过程中并未对车体结构作大的改动,如:没有为安装电路板而特殊钻孔,没有安装特殊的支架等。但为了安装光电码盘,在车体的后部钻了两个小孔。车体前端安装红外传感器,用于寻找引导线,通过对安装孔的调整,直接安装在车体前端的安装孔上。智能车的控制板安装在车体的后部,通过调整安装孔的位置和大小,直接安装在车体上方的原有的两个螺栓上,并通过车体自带的支架固定。单片机最小系统板通过排针插装在控制板上。红外线传感器的信号通过18pin的排线连接到控制板上,舵机的控制线和电源线通过3pin的排线连接到控制板的相应的接口上。为了能提高智能车的行进速度,在设计电路板时尽量减小了PCB板的使用面积,同时简化了电路的设计,在不影响电路功能的前提下,减少了元器件的数量和体积。
1.2控制算法概述
智能车要在引导线的引导下快速行进,传感器的采样周期的大小对车体随动性能将会有很大的影响。当采用周期足够大时,数字离散系统的设计可以按照连续系统的设计思想设计,而且系统的输出性能也和连续系统近似。因此决定采用计算方便位置PID控制算法,在对实际的有智能车、电机、舵机、单片机等部分组成随动系统进行实际调试后发现,PID算式的微分部分对提高的系统的各项性能指标没有明显的作用,选取不当,还会使系统不稳定,因此只保留了比例部分和积分部分。为了提高快速性和稳定性,通过对算法的调整,加入了具有饱和特性、死区特性等特性的环节。
1.3引用文献概述
为了能让智能车有较高的平均行进速度,控制方法主要参考了由胡寿松主编的《自动控制原理》和陶永华主编的《新型PID控制及其应用》两本书。并 1
第一届全国大学生智能汽车邀请赛技术报告
通过试验进行相应的校准。
1.4报告的主要内容
本文将对智能车的制作及其控制方法的C语言实现进行论述。第一章是对全文的概述;第二章将简述模型车机械部分安装及改造、传感器的设计安装、系统电路板的固定及连接等;第三章将简述电路设计说明;第四章中主要介绍智能车的控制方法以及算法的C语言实现;第五章简要论述车体质量、速度调整方法等因素对智能车性能的影响;第六章是结论。
2
第二章 模型车机械部分安装及改造
智能车上的各部分出了光电码盘需要在车体的后部钻两个孔作为安装孔,其余所有电路板都安装在车体原有的安装孔和支架上。
2.1传感器的安装
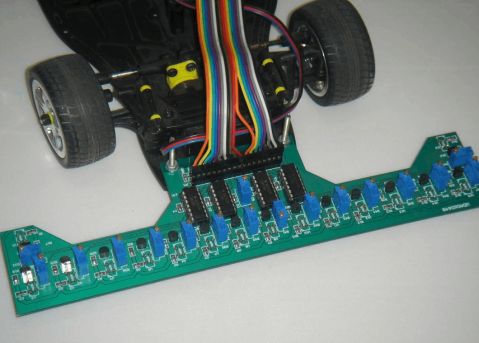
传感器直接安装在智能车前端的用于安装支架的安装孔上,如图:
图2.1 传感器的安装
2.2 主控板的安装
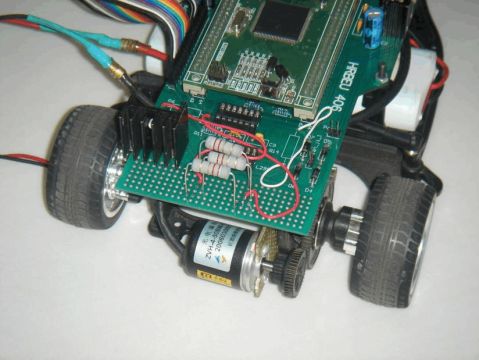
智能车采用单片机HCS12开发板作为控制板,主控制板是用来连接单片机和外围各个功能模块的桥梁。它为各个模块提供相应的接口。根据2.1节中的叙述,将主控制板安装在智能车的后部,并且利用模型原有的安装支架,如图:
3
第一届全国大学生智能汽车邀请赛技术报告
图2.2 主板的安装
2.3光电码盘的安装
光电码盘用来检测智能车当前的电机转速。
图2.3

光码盘的安装
4
第三章 电路设计说明
3.1电源电路
智能车采用的镍铬充电电池供电,电池电压为7.2V,为了能为各个用电设备提供稳定的供电电压,选用低压差稳压集成芯片2940-5.0为系统供电,供电电压为5V。由于传感器的耗电量较大,所以单独为期配备一路电源电路。
图3.1电源电路
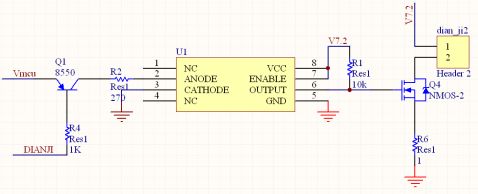
3.2 电机驱动电路
电机的驱动电路有很多种,这里使用的是单管驱动电路。这个电路实现简单,发热少,因此不用很大的散热片,驱动能力很强。

5
第一届全国大学生智能汽车邀请赛技术报告
图3.2电机驱动电路
3.3 舵机驱动电路
堆积驱动电路包括两部分,一部分是电源电路,另一部分是信号连接电路。
3.3.1 电源电路
为了实现方便,使用元器件少,不占用太多的电路板使用面积,同时舵机对电源要求很低,采用二极管降压的方法为舵机提供电源。
3.3.2信号连接电路
图3.3信号连接电路
6
第三章 电路设计说明
为了降低电机对单片机的干扰,使用光电耦合器作信号隔离。
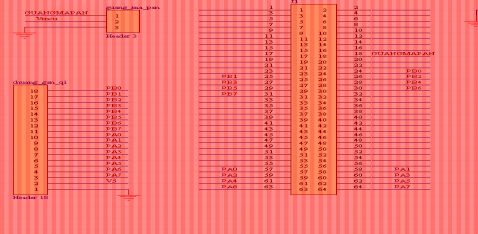
3.4 主控办接口
主控制板主要完成各个功能电路的连接工作,因此需要配备所有的模块的接口电路,主要有传感器数据输入接口、电机驱动信号输出接口、舵机驱动信号输出接口、单片机最小系统板接口。接口用直立插针实现。
图3.4主板接口电路
3.5 传感器电路
智能车需要沿着黑色引导线在白色的跑道上行驶,传感器的稳定性直接决定智能车能否按照正确的轨迹行进。可见光传感器容易受到光照强度的影响,因此必须采用不易收环境可见光强度影响的红外线传感器。这里使用的红外线传感器的型号是JX359,JX359对黑色和白色的分辨能力很强,用它来做寻找引导线的传感器具有很好的稳定性。
7
第一届全国大学生智能汽车邀请赛技术报告
图3.5传感器电路

8
第四章 智能车的控制
4.1 主要代码分析
PID控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于工业控制。因此采用数字PID控制算法作为智能车的运动控制算法。若把智能车看做是一个关心环节,那么他的时间常数将会相对较大,因此PID控制算法中的微分环节对改善系统的性能不会有太大的贡献,最终,对智能车的运动控制采用数字PI控制。
数字PI算式中,将积分环节作了处理,积分时间并不是从0开始,而是从一个积分周期前到当前时刻,积分时间常数取30ms。
dst = dst0 - (Kp*e + Ki*(e+eold));
其中dst0为控制量为0时的PI控制器的输出,Kp为比例系数,Ki为积分系数。程序中dst0=4650,Kp=70,Ki=3。
为了能使智能车的速度能够在各种情况下都能够达到或者接近理想的最高速度,在速度控制上采用变速控制的方法。由于控制前轮转动的舵机的转动速度是固定不变的,因此当引导线相对车体的位置变化角速度大于前轮的转动速度后,智能车将无法稳定的跟踪引导线。在引导线的位置变化较大时,降低车速是十分必要的。
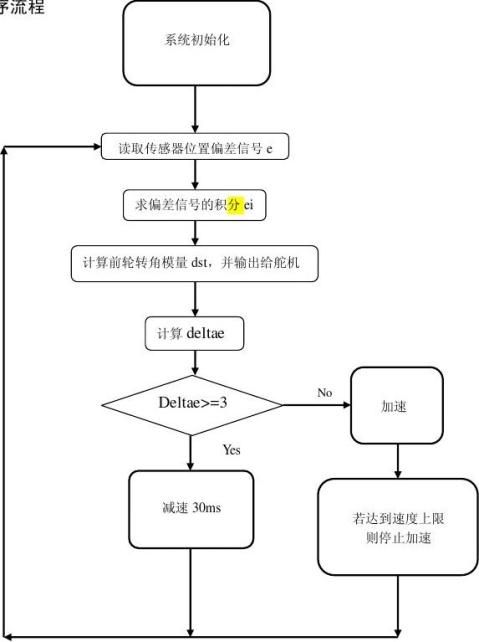
速度的控制算法是按照传感器的输出的变化率作为减速与否的标准,具体方法如下:
首先,单片机对从传感器采集回的位置信号进行采样,采样周期为30ms。舵机的转动角速度常数为:在工作的电压为4.8V 的情况下旋转60度耗时0.2秒即300度每秒。与其相应的引导线相对传感器每移动过一个传感器耗时不应超过6.67ms。当采样周期为30ms时,每个周期内,传感器输出的偏差变化值(程序中定义为deltae)应小于4。
然后,如果deltae大于或等于4,则减速,否则加速。减速为突然减速,而[2] 9
第一届全国大学生智能汽车邀请赛技术报告
加速采用逐渐家速度方法以防止电机因突加给定而电流过大。
相应的调速代码如下:
if (time <= AbsoluteTime)
{
}
deltae = e - eold; if (deltae < 0) deltae = -deltae; if (deltae < 3) { speed++; if (speed > 13) speed = 13; } if (deltae >= 3) speed = 2; eold = e; time += 30; 10
第五章 车体调速方法
5.1 智能车的质量对性能的影响
参加本次智能车大赛的队伍将进行一场速度赛,因此提高智能车的速度是本次比赛的关键所在。
首先,车体的质量将会影响智能车的行进速度。车体质量的大小直接决定了智能车在行进过程中受到的滚动摩擦力的大小,车体的质量越大,滚动摩擦阻力将越大。过大的质量所引起的车轮滚动摩擦力的增加,不仅会使智能车的起动速度降低,同时也会降低智能车的最高前进线速度。
其次,车体质量和重心的位置将影响智能车的转向性能。假设车体的重心在智能车车体的前端,那么,在智能车转弯时,前轮将承受较大的摩擦力,同时,前轮将分担较大的向心力为车体提供向心加速度,这将导致智能车转向灵活度降低,降低智能车进入弯道的线速度(线速度过高,会因转向不灵活而冲出跑道),从而影响比赛的成绩。
为了提高智能车的行进速度和转向的灵活程度,在智能车的制作上,我们尽量减小了车体的质量,同时将重心先后移动。具体实现方法如下:
我们在设计传感器的PCB板和主控板时,特别注意在不影响系统的稳定性的基础上,尽量较小电路板的使用面积。
电路设计上,为了减小使用面积,在完成电路功能的基础上,使用了尽量少的元器件。
没有为主控制板和传感器的电路板安装特别的安装支架,而是将他们直接安装在车体原有的安装孔上。
11
第一届全国大学生智能汽车邀请赛技术报告
图5.1车模整体
5.2闭环调速
为了能对智能车的行进速度进行准确的控制,并且能方便的实现加速和减速动作,采用速度闭环控制是十分必要的。典型的闭环调速系统通常采用双闭环调速系统,但是双闭环调速系统在实现时相对比较复杂,同时会增加CPU的工作负担,使控制系统的采样频率受到影响。因此采用了容易实现的单闭环调速,即只用速度环。
5.3变速前进
正常驾驶汽车时司机都会在弯道时减速,以防止在弯道时由于车身的惯性,导致侧滑。参加本次比赛所使用的智能车虽然一般不会因为惯性在突然转向时发生侧滑,但是如果智能车在行进路径中的直线加速过程中获得了很大的动能,进入弯道的瞬间难免会因为车体惯性而冲出跑道。所以智能车的速度不能是一成不变的,应该在有弯道的地方减速。
那么,减速的依据是什么、速度应该降低多少、弯道内维持多大的线速度等主管因素将直接影响智能车的平均行进速度。在进入弯道后,智能车能否正确的沿着引导线前进,主要依赖控制前轮转向的舵机能否在有限的时间里转动得到指定的位置。舵机有它的固有响应速度参数:在工作的电压为4.8V

的情况 12
第五章 车体调速方法
下旋转60度耗时0.2秒即300度每秒,那么在速度调整周期内,如果引导线偏离智能车车体前端传感器中间位置相对车体的角速度大于300度每秒,舵机将来不及对传感器信号做出反应,智能车将冲出跑道。因此,影响智能车转向性能的因素不是弯道的存在,而是引导线位置相对车体变化的角速度。
根据以上的分析,智能车能否沿引导线顺利的入弯、出弯,取决于车速的调整规律能否保证在引导线出现变化时,引导性位置变化相对车身的角速度小于300度每秒。所以在智能车前进过程中,弯道的出现不是减速标志,减速与否完全取决于舵机的响应速度。加速减速的具体实现将在程序分析中具体说明。 13
第六章 结论
智能车车身的加工制作过程中,尽量的减轻了车体的质量,并后移了中心,从而提高了智能车的灵活度。经过试验,重心在智能车的后部要比在前部车速有了明显的提高,稳定性也有了一定的提高。智能车的控制方法采用了实现简单的PI控制方法,在程序实现上减小了时间及空间复杂度,进而提高了传感器对道路的采样频率。经过调试,只能车的平均速度可以达到1m/s左右,路径的形式及弯道的多少,对平均速度的影响很大。
智能车使用的是红外线传感器来检测引导线的位置。红外线传感器的采样频率较高,配合有效的转换电路,能够输出稳定性很高的引导线位置信号。但是传感器本身性质决定了它不能够对远距离的路况信息进行解读,因此也就不能够进行有关道路信息的预先判断。只能从采样频率上补偿信息量少的弊端。
在下一步开发中,我们准备用线阵CCD作为检测引导线的检测设备。线阵CCD可以对相对较远的道路信息进行采集,而且分辨率高。基于线阵CDD的道路检测可以对引导线的变化进行预先判断和精确的位置微分,为控制算法的实现会提供很大的帮助。
14
参考文献
[1] 《自动控制原理》主编:胡寿松 科学出版社出版
[2] 《新型PID控制及其应用》 主编:陶永华 机械工业出版社 15
附 录
A
I
第一届全国大学生智能汽车邀请赛技术报告 B:程序源代码
#include <hidef.h>
#include <mc9s12dg128.h> #include "Suilong.h"
unsigned long int AbsoluteTime; int SpeedDst;
void Speed_PID(void)
{
}int e; static int ei = 0; int PWMDTY67_Dst; e = SpeedDst - PACN32; ei += e; if (ei > 3000) ei=3000; if (ei < -3000) ei = -3000; PWMDTY67_Dst = 5000 + (1000*e + 2*ei); if (PWMDTY67_Dst > 10000) PWMDTY67_Dst = 10000; if (PWMDTY67_Dst < 0) PWMDTY67 = (unsigned int)PWMDTY67_Dst; PACN32 = 0; PWMDTY67_Dst = 0;
II
第一届全国大学生智能汽车邀请赛技术报告
#pragma CODE_SEG __NEAR_SEG NON_BANKED interrupt void RTI_ISR(void)
{
}
#pragma CODE_SEG DEFAULT
void RTI_Init(void)
{
}
#pragma CODE_SEG DEFAULT
void Delay(long ms)
{
AbsoluteTime = 0; RTICTL = 0x28; CRGINT = 0x80; PACTL = 0x50; EnableInterrupts; AbsoluteTime++; Speed_PID(); CRGFLG = 0x80; unsigned long int timeout; timeout = AbsoluteTime + ms; while (timeout != AbsoluteTime) { __asm { /* __asm WAI */
III
第一届全国大学生智能汽车邀请赛技术报告
}
#pragma CODE_SEG DEFAULT void PORT_Init(void)
{
}
#pragma CODE_SEG DEFAULT void PWM_Init(void)
{
}PWMPOL = 0xff; PWMCLK = 0x00; PWMPRCLK = 0x03; PWMCAE = 0x00; PWMCTL = 0xf0; PWMSCLA = 0x08; PWMSCLB = 0x10; PWMPER67 = 10000; PWMDTY67 = 1000; PWMPER01 = 60000; PWMDTY01 = 4650; PWME = 0xff; DDRAB = 0x0000; } } NOP
IV
附录 B
#pragma CODE_SEG DEFAULT
void SCI_Start(void)
{
}
#pragma CODE_SEG DEFAULT
void SCI_Stop(void)
{
}
#pragma CODE_SEG DEFAULT
void SCI_PutChar(unsigned char Data_8bit) {
}
#pragma CODE_SEG DEFAULT
void SCI_PutStr(char *put_data)
{while (SCI0SR1_TDRE != 1); if(SCI0SR1_TDRE == 1) { } SCI0DRL = Data_8bit; while(SCI0SR1_TC == 0); SCI0CR2_TE = 0; SCI0CR2_RE = 0; SCI0CR2_TE = 1; SCI0CR2_RE = 1;
V
第一届全国大学生智能汽车邀请赛技术报告
}
#pragma CODE_SEG DEFAULT void SCI_Baud_Rate_Init(void) {
}
#pragma CODE_SEG DEFAULT void SCI_Init(void)
{
}
#pragma CODE_SEG DEFAULT void Updata(char i)
{
DisableInterrupts; SCI_Start(); SCI_PutChar(i); SCI_Stop();SCI_PutStr("\n--SuiLong--\n"); SCI0BDH=0x00; SCI0BDL=0x9c; unsigned int i = 0; while(*(put_data + i) != '\0') { } SCI_PutChar(*(put_data + i)); i++;
VI
附录 B
} EnableInterrupts;
void AD_Init(void)
{
}
unsigned int AD_GetValue(void) {
}
int E(void)
{
unsigned char i; int R; int L; int M; int Data; int Flag = 0; unsigned long int time; time = AbsoluteTime + 15; while(!ATD0STAT1_CCF0); return ATD0DR0; ATD0CTL2=0xC0; ATD0CTL3=0x20; ATD0CTL4=0x83; ATD0CTL5=0xA0; ATD0DIEN=0x00;
VII
第一届全国大学生智能汽车邀请赛技术报告
Data = PORTAB;
while (Data == 0) { } for (i=0; i<16; i++) { } for (i=0; i<16; i++) { Flag = Data << i; Flag = Flag & 0x8000; if(Flag == 0x8000) { L = (unsigned int)i;Flag = Data >> i; Flag = Flag & 0x0001; if(Flag == 0x0001) { } R = (unsigned int)i; break; if (time <= AbsoluteTime) SpeedDst = 5; if (time >= AbsoluteTime) SpeedDst = 15; if (PWMDTY01 > 4750) PWMDTY01 = 5450; if (PWMDTY01 < 4550) PWMDTY01 = 3850; Data = PORTAB;
VIII
break; }
}
M = L-R;
return M;
}
void Sys_Init(void) {
SpeedDst = 0; RTI_Init();
PORT_Init();
PWM_Init();
AD_Init();
SCI_Baud_Rate_Init(); Delay(1000);
}
void Direction(unsigned int i) {
if (i>5450) i = 5450; if (i<3850) i = 3850; PWMDTY01 = i; }
void main(void)
{
int e;附录 B
IX
第一届全国大学生智能汽车邀请赛技术报告
int dst = 0; int speed = 0; int eold = 0; int deltae = 0; unsigned long int time = 0; Sys_Init(); for (;;) { e = E(); dst = 4650 - (70*e + 3*(e+eold)); Direction(dst); if (time <= AbsoluteTime) { } SpeedDst = speed; }} deltae = e - eold; if (deltae < 0) deltae = -deltae; if (deltae < 3) { } if (deltae >= 3) speed = 2; eold = e; time += 30; speed++; if (speed > 13) speed = 13;
X