K60模块分配
K60的简介,我们本次使用了以下模块。
1. FTM模块:K60中集成3个FTM模块,而今年我们选用两个B车进行追踪循迹。B车模使用单电机、单舵机,另外需要一个编码器。所以对3个FTM模块进行如下配置:FTM0用以产生300Hz PWM信号控制舵机,FMT1用以产生18.5KHz PWM信号控制电机,FTM2用以采集编码器数据。
2. 定时器模块:K60中有多个定时器模块,我们使用了其中2个。其一用以产生5ms中断,处理相关控制程序。另一个用以超声波模块的计时。
3. SPI模块:我们使用了K60的一个SPI模块,用以和无线射频模块NRF24L01P通信。
4.外部中断:我们使用了三个外部中断。第一个是PORTA的下降沿中断,用以响应干簧管检测到磁铁。第二个是PORTD的跳变沿中断,用以响应超声波模块的输出信号。最后一个是PORTE的下降沿中断,用以响应NRF24L01P模块的相关操作。
数据采集算法
传感器是智能车的眼睛,它们给智能车循迹和追踪提供了必不可少的信息。因此,在智能车软件设计中必须保证数据采集算法的稳定性,同时兼顾其快速性。本车比赛,我们的智能车主要采集以下传感器的数据:电感传感器电路板、编码器、超声波、干簧管。下面主要详述超声波模块、电感传感器电路板的数据采集。
1 .超声波模块数据采集
我们使用的超声波模块的DO引脚输出50Hz的矩形波信号,通过高电平的时间向单片机传递数据。本超声波传感器的高电平时间为声波单程传输的时间,通过这个时间可计算出两车之间的距离。
我们使用外部中断和计时器结合的方式测量高电平时间。首先配置PORTD11为跳变沿中断。中断被触发时,如果PORTD11为高电平则开始计时,如果PORTD11为低电平则停止计时并记录时间间隔。
2. 电感传感器电路板的数据采集
电感传感器电路板通过输出电压的大小反应响应位置和方向的磁场强度。本次比赛中,我们使用了10个电感分布在6个不同位置,因此每个周期都要采集10路ADC数据,每路ADC数据采集32次进行平均滤波。K60芯片中有两路ADC模块,为了最大程度的减少采集数据的时间,我们采用两个ADC模块并行采集的方法。 首先,将10路ADC分为两组,第一组6个使用ADC0模块采集,第二组4个使用ADC1模块采集,两个ADC模块同时采集数据。以第一组为例,依次采集6路ADC数据,循环32次。当两个ADC模块都完成任务时,ADC转换结束。最后进行平均滤波。
控制算法
1. 定位算法
A.两个电感定位算法
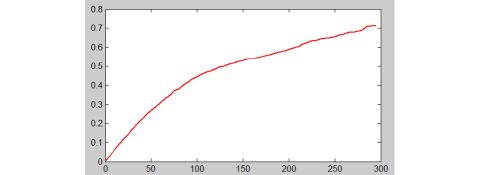
在电磁组算法设计中,“差比和”(即用连个电感数据的差除以它们的和)是一个简单易用的定位算法,但是我们测量发现“差比和”算法得出的偏差距离用着较大非线性。如下图所示,其横轴为实际偏差(单位mm),其纵轴为“差比和”得出的偏差。可以发现,在实际偏差较小时,“差比和”算出的偏差变化较快,实际偏差较大时“差比和”算出的偏差变化较缓。
“差比和”定位与实际偏差比较图
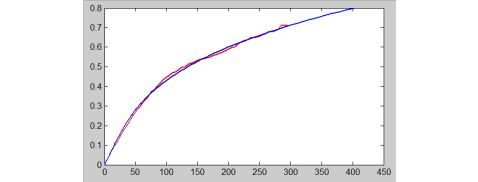
为了使定位具有更好的线性度,我们拟合出一个函数将差比和的值近似转换为离中心线的实际偏差。如下图所示,其横轴为实际偏差(单位mm),其纵轴为“差比和”得出的偏差,红线表示实测的曲线,蓝线表示用以非线性矫正的一个近似的曲线。
非线性矫正曲线
B. 多个电感的定位算法
使用上述的两个电感定位算法,可以使两个在同一直线上不同位置的电感两两算出一个距离偏差。由于两个电感的测距有效范围有限,我们采用三个横向电感取其中较准确的两个电感计算距离。
记三个横向的电感对应的数值从左到右分别为Left、Mid、Right。
当Left最大时,使用Left和Mid两个电感值计算偏差;
当Right最大时,使用Left和Mid两个电感值计算偏差;
当Mid最大时,根据Left和Right计算出的偏差来计算Left-Right、Left-Mid
、
Mid-Right三组偏差E0,E1和E2的比重K0,K1和K2。最后通过
(E0*K0+E1*K1+E2*K2)/(K0+K1+k2)
计算出近似的实际偏差,使得三组数据计算值之间平滑过渡。
2 .基于增量式PID的速度控制
A. 电机特性的研究与建模
本次比赛我们使用了B车模,相比于直立车模,B车模对电机的PID调节要求不是很高。但为了更好的理解PID控制算法和电机特性,我们通过电机的特性曲线近似求出电机的传递函数。
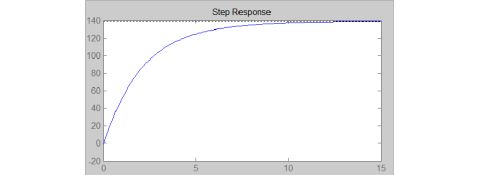
首先记录车在给电机20%恒定占空比时的速度和时间曲线,以此作为电机传递函数的阶跃响应,如下图所示。然后利用MATLAB得出曲线的近似表达式:
e = 91.1457 - 64.6742*e^(-t/3.4654) - 13.6656*e^(-t/3.4654*2) - 12.6844*e^(-t/3.4654*3);
最后以此函数作为电机传递函数的阶跃响应,求得其传递函数:
-0.733 s^3 + 60.96 s^2 + 119.7 s + 45.48
----------------------------------------
s^3 + 2.276 s^2 + 1.583 s + 0.3276
电机传递函数的阶跃响应
利用此传递函数和MATLAB的PID调节器,我们很快的得出了快速稳定地控制车速的PI参数,并未使用D参数。这个建模的过程并非必要的环节,通过不断的调试与修改完全可以达到这个要求甚至比建模调的更好,但是在这个过程中我们对PID的理解得以加深。
B. 增量式PID
增量式PID是指数字控制器的输出只是控制量的增量Δu(k)。采用增量式算法时,计算机输出的控制量Δu(k)对应的是本次执行机构位置的增量,而不是对应执行机构的实际位置,因此要求执行机构必须具有对控制量增量的累积功能,才能完成对被控对象的控制操作。执行机构的累积功能可以采用硬件的方法实现;也可以采用软件来实现,如利用算式 u(k)=u(k-1)+Δu(k)程序化来完成。
式中Δe(k)=e(k)-e(k-1)
2. 基于位置式PID的舵机控制
A. 位置式PID
基本PID控制器的理想算式为
u(t)——控制器(也称调节器)的输出;
e(t)——控制器的输入(常常是设定值与被控量之差,即e(t)=r(t)-c(t)); Kp——控制器的比例放大系数;
Ti ——控制器的积分时间;
Td——控制器的微分时间。
设u(k)为第k次采样时刻控制器的输出值,可得离散的PID算式
式中
在本次比赛中我们采用了位置式PD控制算法,即积分系数Ki为0。
B. PID参数的计算算法
在调试过程中,我们发现当定位算法做的较好的时候,定值的PD参数也可以让小车快速稳定的循迹。为了进一步提高小车的速度和稳定性,我们加入了动态调整PD参数的算法,我们称之为“二维表PD模糊整定”。



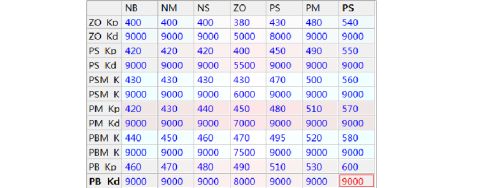
“二维表PD模糊整定”参数表
如上图所示,横向由左到右分别表示偏差变化率为{-35,-25,-15,0,15,25,30},纵轴没两行为一组工6组,每组2行分别表示Kp,Kd参数,6组由上至下分别表示偏差{30,60,90,120,150,200}。
通过这种方法得出一个2输入2输出的“PD模糊整定”算法,其输入为偏差和偏差变化率,输出为Kp和Kd参数。每一组偏差E和偏差变化率Ec对应的输出都可以通过以上二维表来定义,当E、Ec不能准确对应表中某个位置时,算法通过其相邻的参数计算出所要的Kp、Kd参数。
调试程序
1. 无线接收上位机参数的程序
在调试过程中需要不断的修改参数,尤其是我们使用了二维表后参数的修改幅度急剧增大。按键调节方案已经不能高效的胜任这么大数量的参数修改了,为此我们编写了无线发送参数的上位机和小车上对应的接收处理程序。
为了让数据准确的无线传输,我们定义了帧格式。我们采用的无线通信模块是NRF24L01P,我们定义一帧数据为32字节。帧格式为:

加入起始标志可使得上位机适应蓝牙模块发送。
功能码:功能码用以标志后面数据是什么数据,接收端程序根据功能码处理后面的数据部分。例如功能码为0x00 0x10时,程序数据部分的前2字节作为无符号整形数据保存到temp变量,temp/100的值赋值给Kp。这样就实现了对Kp变量的重新赋值。
数据:接收端程序根据功能码处理此部分。
校验码:采用CRC16校验方式,用以确保数据传输的正确无误。
上位机截图
2. 无线发送小车状态量的程序
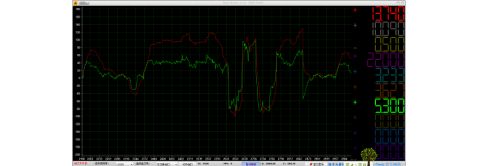
在调试过程中有时靠人眼观察无法准确的知晓小车的运行状态,尤其是程序计算的一些中间状态量。当我们将这些状态量在电脑上通过曲线显示出来时,就更容易把握小车的运行状态了,这些曲线为整定参数提供了有效的依据。
在这部分我们采用了是NRF24L01P模块发送数据。需要发送的数据主要有:电机速度、舵机占空比信号、距中心线偏差等数据。此部分的帧格式由虚拟示波器给出,我们编写响应的发送代码。
voidmsg_datascope(

float data0,float data1,float data2,float
data3,float data4,float data5,float data6)
{
msg_buff_tx[0]=30;// USB-NRF24L01模块要用的格式
msg_buff_tx[1]=0x24;// 上位机要用的格式
*(float*)((uint32)msg_buff_tx+2)= data0;
*(float*)((uint32)msg_buff_tx+6)= data1;
*(float*)((uint32)msg_buff_tx+10)= data2;
*(float*)((uint32)msg_buff_tx+14)= data3;
*(float*)((uint32)msg_buff_tx+18)= data4;
*(float*)((uint32)msg_buff_tx+22)= data5;
*(float*)((uint32)msg_buff_tx+26)= data6;
msg_buff_tx[30]=29;
if(nrf_tx(msg_buff_tx,DATA_PACKET)==1)
while(nrf_tx_state()== NRF_TXING);
}
第二篇:飞思卡尔智能车大赛特等奖技术报告(节选)
20xx年飞思卡尔智能车大赛特等奖技术报告(节选)
作者:李嵩 孙文静 瞿佳璐 上海大学
关键词: 飞思卡尔 智能车 摄像头 偏振镜 图像采集 FTTx
车模的机械部分是影响其行驶性能最直接的部分,其重要性不言而喻。一个不良的机械系统会增加控制的难度,会为车模的速度提升带来障碍。因此,车模的机械性能应该是优先考虑的问题。 摄像头的安装
大量事实证明,重心越低越好。为降低重心,并同时保证图像视野宽度,最好的方法就是使用旋转摄像头。在08年的第三届比赛中,摄像头-舵角连动机构在RacerX的车上取得了出人意料的成效,但也暴露出了一些机构固有的问题,其中包括:机构虚位导致摄像头定位不准,摄像头在中位附件容易振荡。因此需要对机构进行改良。改良方法如下。
(1) 增加自动回正机构,给旋转摄像头提供自动回正力矩,以减小机构虚位。
(2) 给旋转摄像头机构调静平衡,减少车模在过弯过程中离心力对摄像头的影响。
(3) 用滑槽代替原本中间的连杆球头,为旋转摄像头在中位附近制造一段死区,使车模在打小角度舵角时,摄像头不转,从而增加车模在直线和小S弯中的稳定性。

改良的机构三维图如图2所示。
综上所述,这是一个带有死区及自动回正机构的旋转摄像头机构。此外,在控制方面,可以设法检测出摄像头旋转的角度,并将其反馈在控制算法里。检测摄像头角度的方法大致有以下两种:
(1) 在车头划线做标记,用摄像头检测车头标记,来判断自己所转的角度。
(2) 由于舵机S3010是模拟舵机,其中是用电位器来反馈舵角的,因此可以将此电位器的信号飞线引出来,用单片机内部AD进行采集。
偏振镜的使用
由于追求更好的机械性能,我们把摄像头降低,达到降低重心的目的。但是由此带来了反面的影响,那就是图像的形变以及受到跑道面反光的影响。跑道上的黑线由于反光原因,摄像头检测的数据丢失黑线。为了解决反光导致检测不到黑线的问题,我们利用了偏振镜。偏振镜的作用其实是过滤掉某个角度的偏振光,实现检偏的作用。当自然光经过跑道面以后,会产生偏振光,这反射的偏振光会影响到图像的采集。通过在摄像头前面安装偏振镜片,并且调整偏振镜片的检偏角度,可以得到几乎无反光影响的图像。如图3所示。

不过,使用偏振镜也会带来问题。虽然偏振镜能把跑道的偏振光过滤掉,但同时把环境的自然光强度降为原来光强的二分之一,也就是说通过偏振镜之后光线变暗了。在光线强度较大的时候不会有太大影响,但是如果环境光比较弱的时候,加了偏振镜会使摄像头感应的光线更弱,而大多数摄像头具有自动曝光功能,在光线昏暗时,摄像头会自动增加曝光时间,导致图像更容易模糊。因此,使用偏振镜要合理权衡利与弊才能发挥偏振镜的作用。
图像采集模块
清晰稳定的图像是一切的基础,因此今年我们在摄像头选择和多种采集方案的测试上花了很多功夫。 摄像头选择
由于CMOS摄像头重量轻、功耗低,因此依然十分有吸引力,所以我们对CMOS与CCD再次进行对比测试,测试用的CMOS摄像头为康美迪亚的1/3 CMOS,图4为CMOS摄像头与CCD摄像头的原始图像,可以看到CMOS图像中的噪点远远多于CCD的图像。并且CMOS摄像头在拍摄运动图像时容易发生模糊。

动态图像模糊主要是在光线较暗的环境下,为了保持图像亮度,摄像头自动将曝光时间增大所致。要彻底避免图像模糊情况的出现,就要手动设置摄像头曝光时间,于是我们又测试了1/3数字摄像头OV7620,通过SCCB将摄像头设置到手动模式,手动修改其曝光时间。
图像采集方案
今年我们测试了很多种采集方案,首先由于更换了主频更高的S12XS128,我们对其内部AD又进行了测试,结果很失望,尽管主频增高,最高精度从10bit增加到了12bit,但是AD的转换时间并没有多少改善,88MHz主频下行像素在80左右。之后我们又测试了外部二值化采集、数字摄像头采集、外部AD加LM1881采集、视频解码芯片采集。其中视频解码芯片图像质量最好,并且有图像预处理电路,但由于实验电路还在测试阶段,本次比赛并没有启用,仍然延用了去年的外部AD采集方案。
电机驱动模块
去年我们使用SI4430,模仿电子调速器制作了驱动电路,取得了不错的效果,但是对于能耗刹车的刹车能力始终存在争议,因此我们对能耗刹车和反压刹车做了对比测试。
参考第三届上海交大SpeedStar队的技术报告,我们使用BTS7970制作了驱动电路,其原理如下。该电路有一路PWM输入,两根I/O线作为模式选择线,可以有正转、反转、能耗刹车三种工作模式。 我们使用“白骑士”模型车的驱动电路与上述电路(图5)进行对比测试,图6是车模的速度曲线,其中浅色的线为给定速度,深色的线为实际速度,纵坐标单位为mm/s,横坐标单位为帧(即40ms)。
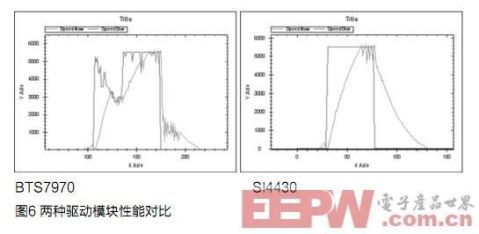
比较以上速度曲线,两种驱动在加速能力上相差不大,而反压刹车的减速能力远高于能耗刹车。因此,可以得出结论,对于比赛所提供的380电机而言,10mW左右内阻的驱动电路已经足以满足要求,反压刹车的效果是远好于能耗刹车的,而用BTS7970制作驱动电路是一个简单易行方案。
SD卡
SD卡实时存储系统是我们去年率先提出和使用的辅助调试手段,极大地提高了调试效率,今年我们继续延用并对SD卡存储的速度和稳定性做了改进。去年我们使用的MC9S12DG128,在设计之初主要考虑到SD卡为3.3V系统,而单片机为5V系统,之间需要逻辑电平转换,为此我们在设计SD卡电路时在单片机输入端加了三极管放大。今年我们使用的MC9S12XS128可以支持3.135V到5.5V的宽电压供电,我们使用3.3V供电就可以实现与SD卡接口的直连,这样可以提高读写SD卡的稳定性。 参考文献:
[1] 邵贝贝. 单片机嵌入式应用的在线开发方法[M]. 北京:清华大学出版社. 20xx年10 月第1 版
[2] 卓晴, 黄开胜, 邵贝贝. 学做智能车[M]. 北京:北航出版社, 2007.3
[3] 林辛凡, 李红志, 黄 颖. 清华三角洲队技术报告[R].2008
[4] 秦召兵,师恩义,王力. 东北大学猎豹队技术报告[R].2008
[5] 胡晨晖, 陆佳南,陈立刚.上海交通大学CyberSmart 队技术报告[R].2008