2015中国机器人大赛暨
ROboCup公开赛
技
术
报
告
学校:
队伍名称:
领队老师:
指导老师:
参赛学生:
二零一五年十月
目录
目录
任务、背景和意义 ................................................................................. 4
1、项目名称 ..................................................................................... 4
2、研究背景、任务 .......................................................................... 4
3、项目意义 ..................................................................................... 4
一、 机器人的总体功能 ...................................................................... 4
1、 自主行走 .................................................................................. 4
2、 路障处理 .................................................................................. 4
3、 语音图像传输 ........................................................................... 4
4、 智能灯光 .................................................................................. 5
5、 人体感知 .................................................................................. 5
二、 硬件系统 ..................................................................................... 5
1、编码电机 ..................................................................................... 5
2、光电开关 ..................................................................................... 5
3、超声波测距 ................................................................................. 5
4、人体感知模块 ............................................................................. 5
5、光敏电阻 ..................................................................................... 6
参考文献 ................................................................................................. 6
摘要 智能探测救援机器人,在面对灾难的现场可能存在高温、有毒气体、辐射等因素对人类生命造成危害的位置环境。有时为了救援或者重要任务的完成必须要进入这些场所时,为了保障人们的生命安全,可以使用探测机器人。智能探测机器人有着可靠的探测和导航系统,能够到达人们制定的场所进行探测,并传回实时环境信息,为人们的后续工作提供可靠的基础。
关键词:ARM、智能探测、人体感知
任务、背景和意义
1、项目名称
智能探测救援机器人
2、研究背景、任务 近年来,国内外地震、核泄漏、火灾等灾害频发。这些灾害造成了严重的人员伤亡和财产损失。这些灾害发生后首要的任务是现场状况和被困人员的探测工作。然而这些探测行动都遇到了同一个难题,因灾害过后现场情况复杂(如:有害物质泄露、现场高温、灾后空间狭小),致使救援人员无法进入现场了解情况,救援工作难以展开。
3、项目意义 我们设计了可以进入复杂灾后现场,采集现场参数、反映现场情况,帮助救援人员制定解决方案的机器人。本作品具有体积小、灵活性强、维修简单的特点。可以由救援人员随身携带进入现场实施探测、救援。
一、 机器人的总体功能
1、 自主行走
超声波测距模块可以较精准得判断出车体与两侧障碍物的距离,通过检测到的实际距离值与预定距离值对比,再进行编译转向行驶指令,从而实现自主行走探测功能。
2、 路障处理
正前方遇到路障并不可绕行时,升降机上的铲板将路障铲起并提升到一定高度,拨送杆将其拨送到传送带,传送系统将路障移到其车体后方。
3、 语音图像传输
采用无线传输模块和监控系统实行实时监控,全天候、多方位工作,为场外搜救人员提供实况信息反馈。
4、 智能灯光
通过光敏传感器来智能调节灯光控制,实现对明暗环境的双重适应,保障摄像头等正常工作。
5、 人体感知
利用热释电效应原理制成,通过到检测人体辐射出的红外线(波长集中在10000nm左右),表示检测到人体,并联通报警器,从而实现智能搜救功能。
二、 硬件系统
1、编码电机
编码电动机内置独立计数器(增量式编码机),最大工作电压为9V,最大工作电流为0.5A,最大转速为1800r/min,输出旋转运动,直接执行驱动执行机构,编码器有计数功能,可实现准确定位。
2、光电开关 电开关(光电传感器)是光电接近开关的简称,它是利用被检测物对光束的遮挡或反射,由同步回路选通电路,从而检测物体的有无。物体不限于金属,所有能反射光线的物体均可被检测。光电开关将输入电流在发射器上转换为光信号射出,接收器再根据接收到的光线的强弱或有无对目标物体进行探测。
3、超声波测距
超声波测距离传感器,采用超声波回波测距原理,运用精确的时差测量技术,检测传感器与目标物之间的距离,采用小角度,小盲区超声波传感器,具有测量准确,无接触,防水,防腐蚀, 低成本等优点。
4、人体感知模块 热释电红外传感器是一种能检测人或动物发射的红外线而输出电信号的传感器。 热释电效应同压电效应类似,是指由于温度的变化而引起晶体表面荷电的现象。热释电传感器是对温度敏感的传感器。它由陶瓷氧化物或压电晶体元件组成,在元件 两个表面做成电极,在传感器监测范围内温度有ΔT的变化时,热释电效应会在两个电极上会产生电荷ΔQ,即在两电极之间产生一微弱的电压ΔV。由于它的输出 阻抗极高,在传感器中有一个场效应管进
行阻抗变换。热释电效应所产生的电荷ΔQ会被空气中的离子所结合而消失,即当环境温度稳定不变时,ΔT=0,则传感 器无输出。当人体进入检测区,因人体温度与环境温度有差别,产生ΔT,则有ΔT输出;若人体进入检测区后不动,则温度没有变化,传感器也没有输出了。所以 这种传感器检测人体或者动物的活动传感。

由实验证明,传感器不加光学透镜(也称菲涅尔透镜),其检测距离小于2m,而加上光学透镜后,其检测距离可大于7m。
5、光敏电阻
参考文献
【1】 龚振邦等编著 机器人机械设计 / 电子工业出版社 1995
【2】 刘迎春 . 传感器原理设计与应用[M] . 长沙:国防科技大学出版社,1992
【3】郁有文,常建,程继红.传感器原理及工程应用.西安:西安电子科技出版社,2003
第二篇:中国机器人大赛及其机器人技术发展
k囫.……,.一一……一一一~一一一一一一一一~一………]l¨I删量日日舅
中国机器人大赛及其机器人技术发展
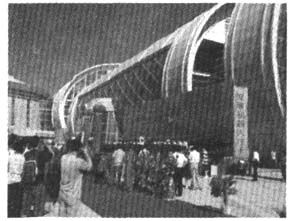
一、2010中国机器人大赛暨RoboCup中国公开赛是经过国际机器人足球世界杯竞赛组公开赛织认可的国际赛事,是继日本公开赛、美国公开
赛、德国公开赛、澳大利亚公开赛之后的全球第2010年7月16日~20日,2010中国机器五大公开赛。本届中国机器人大赛暨RoboCuP人大赛暨RoboCup公开赛在内蒙古自治区鄂尔公开赛由中国自动化学会机器人竞赛工作委员多斯市康巴什新区国际会展中心举行,如图1所会、RoboCup中国委员会、科技部高技术研究示。来自171所大学的1021支代表队,2000发展中心主办,内蒙古自治区鄂尔多斯市政府承余人参加了本次大赛,为历届大赛中规模最大的办。基本覆盖了中国现有顶级的机器人专家和众一次。大赛设比赛项目为12大类66小项,有根多知名机器人学者,成为当今中国机器人尖端技据国际比赛规则进行的RoboCup足球机器人、术产业竞赛和人才汇集的活动之一。自1999年RoboCup救援机器人、RoboCup家庭机器人比以来。该大赛已连续举办11届,本届赛事汇聚赛(以上均分为实物类与仿真类),有根据FIRA了来自北京大学、清华大学、中国科技大学、国比赛规则进行的FIRA小型组与FIRA仿真组比防科技大学、上海交通大学、上海大学等著名高赛,还有我国在实践过程中自主提出的比赛项目.校参赛。RoboCup机器人大赛广泛涉及人工智包括机器人武术擂台、舞蹈机器人、双足竞步机能、计算机视觉、自动控制、精密仪器、传感和器人、自由体操机器人、机器人游中国、水中机信息等一系列学科的创新研究和集成,能融合学器人、空中机器人等竞技类赛事,以及医疗、助老、校在信息技术等方面的成果,反映出一个学校在家庭等服务类机器人赛事,涉及机械、电子、自计算机软件、通讯、人工智能、计算机视觉、多动控制、传感器、计算机软硬件和人工智能等众智能体协调和自动化技术方面的实力,也是一个多先进技术。已经成为交流知识、了解前沿技术、学校综合科技实力的最好体现,通过RoboCuP体验科技魅力的平台。机器人足球赛可以向外界展示学校的高科技进
展。作为国内机器人竞赛领域水平最高、规模最大的赛事活动,大赛吸引了社会媒体如中央电视台,鄂尔多斯电视台。新浪网等广泛关注。
二、别开生面的机器人展示以及媒体报道
图120lo中国机器人大赛开幕式在本届机器人大赛过程中,中央电视台新中国机器人大赛汇集了当今中国机器人尖端闻频道的记者们马不停蹄的对平比赛实况进行现
场直播与专题报道,包括对水中机器人、舞蹈机
器人、机器人武术擂台赛、机器人游中国、标准30万方数据2010VOL.11技术产业竞赛和顶尖人才,是国内最具影响力、最权威的机器人技术大赛和学术大会,RoboCup
嘲¨llr…~一………一一
平台Nao(类人形)机器人、家庭服务机器人、中型机器人等。以下为2种特殊的机器人。
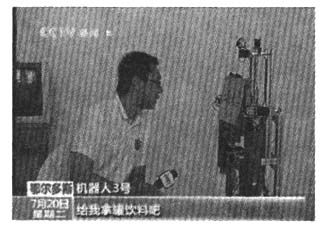
2010年7月20日上午,中央电视台新闻频道的朝闻天下节目播出了“我家的机器人”,图2为电视截图。由参加2010中国机器人大赛暨RoboCup公开赛家庭服务机器人组的5支代表队组成机器人家庭成员。完美演示了一个机器人情景剧,央视记者刘晓波作为家庭主人。上海大学陈万米老师作为客人,5个机器人分别在家庭中完成不同的功能。内容简要如下:
在听到外面的敲门声以后,1号机器人(第二炮兵工程学院制作)开门并迎来了客人,并带到房间内。客人与主人在客厅聊了一会以后。主人吩咐2号机器人(中国科学技术大学制作)与3号机器人(上海大学制作)分别为客人与主人拿取饮料.其中2号机器人与客人是英文对话.这两个机器人完成得很好,在客人与主人聊天的过程中,4号机器人(广州大学制作)进行舞蹈表演,为主客人助兴,增加乐趣.最后。由5号机器人(上海交通大学制作)带客人离开房间。主持人最后说“在未来的几十年中,体贴周到的家庭服务机器人一定能走进我们的家庭当中”。
图2“我家的机器人”电视截图
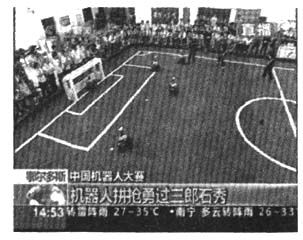
2010年7月20日下午,中央电视台新闻频道直播了别开生面的人机大战,图3为人机大战截图,交战双方为北京信息科技大学的中型足球机器人队与研发人员。场上进行的是5
Vs
5的比
赛,场面非常精彩。我们不时的看到足球机器人娴熟的配合、传球、射门等,人类队员也拿出他的绝活,包括头球,胸部停球等,获得了现场观众的阵阵掌声,相信在电视机前的观众看了也很过瘾。这场比赛尽管不是双足直立的机器人与人类的比赛,但是为我们共同的目标,即在2050
万方数据
…撼羽
机器人R口bDt_
年前后实现人机大战作出了铺垫,让科研人员看
至0了努力的方向。
图3人机大战截图
通过以上2段的电视直播,让我们看到机器人的功能越来越齐全。离我们的距离越来越近。我们有理由相信。在不远的将来。机器人能够走进家庭为人类提供各种服务。
机器人核心技术及其发展
在欣赏了机器人赏心悦目的表演之后,我们
不经要问,究竟靠的是什么技术,使目前的机器人达到如此的状态,在这里,我们以智能足球机器人系统为例。进行简要介绍。
智能足球机器人系统由摄像机实时采集比赛场地的图像。输入到信息采集与处理计算机中.图像识别程序实时识别出场上的敌我双方机器人和球的位置及方向后。将这些信息传送到决策与控制计算机中,决策程序根据场上态势实时做出相应的反应,通过计算得出场上本方每一个足球机器人应该的运动规划和运动方式。并转化成足球机器人的各个轮速,然后通过无线通信系统将
指令发送给场上的足球机器人。足球机器人作为整个系统的执行机构,在接受到命令后,由机载的控制电路控制电机运转。足球机器人对决策与
控制计算机主机命令的执行结果又通过摄像机的
采集反馈回信息采集与处理计算机,从而完成一个图像闭环回路,系统进入到下一个循环。该系统从功能上分,可以分为四个子系统:视觉子系统,决策子系统,机器人本体子系统(包括机械子系统和控制子系统),通信子系统(无线通信收发)。
电子薯佑
31
k群……一…………………………………]Ⅲ啊
1.智能足球机器人系统的视觉子系统智能足球机器人系统的视觉子系统,相当
于人类的眼睛,是整个系统的信息获取的主要部分,其任务是实时采集赛场上的图像,处理并辨识,得到场上10个(假设是5
Vs
5足球
机器人比赛系统)足球机器人和球的有关数据,并将这些数据提供给决策子系统。
对于智能足球机器人系统,是决定系统总体性能的关键因素。比赛过程中有关环境的所有信息都是通过视觉子系统获取的,因此视觉子系统对于整个系统的重要性不言而喻,视觉系统性能优良的智能足球机器人系统就把握了比赛取胜的先机。
在智能足球机器人系统比赛中,视觉系统应用的场景是一个已知的结构化环境,而且所有要识别的目标都使用规范化的色标加以标识。但是10个足球机器人是在不停的高速运动中,且对于处理的速度,准确度和可靠性有很高的要求,其对上位机的判断有着至关重要的影响。视觉处理分为图像采集与图像处理。
智能足球机器人系统视觉子系统要处理的主要信息是颜色信息,而光照条件的变化引起的失真,采集图像中的噪声干扰,摄像头产生的桶形失真,这就要求视觉系统必须具有相当
的鲁棒性(指系统的健壮性)。
2.智能足球机器人系统的决策子系统
决策子系统,上接视觉,下接通信,是智能足球机器人系统的中心枢纽,相当于人类的大脑。它的载体是一台计算机,其决策功能由智能足球机器人系统的决策子系统主要考智能足球机器人系统比赛环境复杂,决策系统面对的是一个复杂、动态、难以准确得到为进一步的决策提供良好的背景数据基础。
32
万方数据
2010VOL.11
决策的目的就是取得比赛的胜利,它应该能适应并击败对方。因此。策略库应该具有开放性和可扩充性。
决策必须满足实时性需求,能在较短的时间内完成决簧过程。
处理好与视觉、通信系统的接口。
基于三层模型的决策子系统的决策模型属于分层递进控制方法,其中具体分层方式可以有一定的不同,这里提到的三层决策模型是把决策的层次分为协调层、运动规划层、基本动作层。决策模型中的协调层突出的是足球机器人之间的协调组织,通过从整体上分析场内形势做出群体的协调意图。然后将协调意图传到运动规划层。运动规划层将意图分解为每个足球机器人的目标.并将目标进一步细化,进而形成足球机器人运动的具体方式,这些运动方式以函数调用的方式传到基本动作层,由基本动作层完成运动指令的设定。即足球机器人运动速度指令。
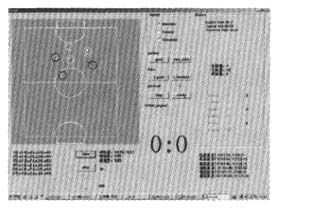
视觉子系统与决策子系统的图像监控与决策界
面图如图4所示。
图4图像监控与决策界面图
3.智能足球机器人系统的机器人本体子系统
足球机器人的本体子系统,相当于人类的身体与大腿。从功能上主要分为机械子系统与控制子系统。
(1)足球机器人本体的机械子系统’
足球机器人的机械子系统在整个系统中充当与于执行机构,是实现各种动作的主体。足球机器人的性能.尤其是运动性能,对整个系统起着举足轻重的作用。因此要求足球机器人反应迅速,运转灵活,需要有坚固的本体,功重比较大的电机,合理的机构等。机械子系统包括动力机构,控球机构,击球机构等。
两轮驱动的足球机器人的运动轨迹是由圆弧和
计算机内运行的决策程序实现。复杂的比赛采取的策略会大不相同,所以战略战术的研究便成为决策子系统的中心任务。决策子系统的好坏,直接影响到比赛的成败。
虑以下问题:
模型的环境。决策子系统应能适应复杂的环境,
_¨llr…一一避ililmA羽lzabat一圆弧的切线组成的,是非完整性约束系统。而一定要能流过约30—40A大电流,所以采用一个大采用四轮全向轮驱动的足球机器人是完整性约功率MOS管来充当开关驱动电磁铁。电磁铁驱动电束系统.可以全向移动。运动轨迹是折线。目路如图6所示:前的足球机器人大多采用四轮全向轮驱动,其运动路线直接,同时有利于运动规划。全向移动依靠的是全向车轮。全向车轮的基本构造是大轮的边缘套有侧向小轮。由全向轮组成的全向移动机构,运动灵活,效率高,承载能力强;轮上的各个小轮一般均处于纯滚动状态,不易磨损;滚子轴的受力较好;对每个大轮的转向和转速控制得当,可以实现精确定位和轨迹跟踪。因此,目前普遍采用全向轮驱动的足球机器人。
在足球机器人的正面安装控球机构和击球图6电磁铁驱动电路结构,所以加大了位于足球机器人前端的两轮由于DSP控制信号是3.3V的并且DSP的驱动的问隔到120度,这样就可以留出更大的空间能力比较小,不能直接驱动大功率MOS管,另外安装功能更强的控球。击球装置,并且提高了考虑到电磁铁工作时对DSP可能产生的干扰,所以直线运动的速度。位于机体后端的两轮的间隔在MOS管和DSP输出引脚间加个4N25构成的隔为90度。离驱动电路。控制信号通过MOS管驱动电路来驱动足球机器人的带球装置如图5所示,采用MOS管工作,大功率MOS管再驱动电磁铁工作。皮带传动或齿轮传动将带球电机的旋转运动传(2)足球机器人本体的控制子系统递到摩擦轮上。再由摩擦轮于小球的相对运动足球机器人的控制子系统一般由电源模块、电使小球有一个向足球机器人方向的运动趋势。机驱动电路、无线通信模块、DSP控制器、IR(红外)从而使足球机器人“带住”球。传感器、击球机构控制电路和升压电路和带球机构
控制电路组成。其中电源模块为两组独立供电的电池组,数字电路由一组锂电池组供电。电机及其驱动电路.击、带球控制电路由一组镍氢电池组供电(或2组镍氢电池组分别供电)。加载在足球机器人
图5足球机器人的带球装置实物图本体的无线通信模块建立起DSP和上位机间的可靠足球机器人处于一个实时性很强的动态环通信,保证足球机器人能快速、高效地接收上位机境中。为了出色地完成比赛任务,不仅要求足发出的控制指令.;DSP控制器为足球机器人控制系球机器人具有良好的动力学特性,还要求足球统的核心。负责信号的采集.并根据一定的算法生机器人具有和人类球员一样的踢球等能力。采成PWM信号以控制驱动电机。同时接收机载传感器用基于电磁铁的击球机构是足球机器人目前主的反馈信息并进行相应的操作;IR红外传感器安装流的击球机构。它的优点是力量大,动作频率在足球机器人的前部,当系统摄像头识别不到球时,高,机械结构相对简单。为了获得较好的击球可以用这一IR传感器来检测车前方是否有球;击球效果,需要具备专门的升压电路。有了升压电机构的升压电路能够产生150V的直流高压供电磁铁路为电磁铁提供能量,要使它工作起来还要有工作,完成传球和射门动作;带球控制电路驱动带驱动电路。实际上电磁铁驱动电路起的只是开球电机工作。关作用。由于电磁铁内阻只有几欧,这个开关一个红外发光管与一个红外接受管构成一个红万方数据电孑曩作

33
融啾
外光电传感器(如图7所示)。红外光电传感器内部各有一只NPN型光电管,它们的集电极均直接接到电源正极,发射极则分别通过1:12、R3和P1的上、下部分接到电源负极。当其中一只传感器的光电管探测到强度足够的反射红外光时,该光电管的发射极就输出高电平(接近电源电压);另一只传感器因偏离轨道线较远而探测不到强度足够的反射光,其光电管的发射极就输出低电平(接近0V)。
两只传感器的输出电压分别加到运放(U1A和U1BCLM358)的同相输入端和另一只运放的反相输入端,从而使这两只运放对来自两只传感器的输入信号分别构成输入极性相反的两个差动放大器。当Q1探测到的反射红外光照大于Q2时,Q1的输出电压大于Q2,~一一……一…一…~~…一一~~一lllII啊器人上。通常认为无线通信子系统是由无线数据发射器和无线数据接收器两部分组成。无线数据发射器通过无线载波把足球机器人运动控制指令数据从天线发射出去,无线数据接收器从天线接收到信号后.经解调后获得足球机器人运动控制指令数据.控制足球机器人的运动。为了实现一对多的通信。足球机器人队的通信采用广播方式,所有本方足球机器人采用同一的通信频率。而发给不同足球机器人的命令则根据各自的标识位加以区分。每个足球机器人能够收到上位机(主控决策计算机)发送的任一条指令。如果足球机器人检测出信号的某个字节和自己的标识相符。则随后的命令被判断为有效,从而完成相应的动作。5.家庭服务机器人的技术发展与研究趋向
为使机器人走入家庭,更好的为人类服务,广大的科技人员目前从以下几方面入手研究与攻关。
服务机器人的双目视觉技术,即实现机器人对所处环境的描述、识别与理解。主要包括对环境中U1A的③脚输入电压大于②脚,其①脚输出高电平。与此同时U1B因⑤脚输入电平低于⑥脚而输出低电平。
4.智能足球机器人系统的通信子系统智能足球机器人无线通信子系统,相当于人类的耳朵.是连接场外主机和足球机器人,以及足球机器人之间的纽带。
决策子系统产生的运动控制指令通过无线通信子系统发送到足球机器人上。从结构上,完整的通信系统可以分为4部分:计算机主机中的通信程序、无线数据发射器、无线数据接收器、足球机器人控制器中的通信程序,其中主机中的通信程序嵌入在决策子系统中;无线的物体识别、人体识别,以及通过双目视觉实现对机器人自身和它所处环境中的对象物体、人物进行准确定位等关键技术的研究。服务型机器人的语音识别技术:即使智能机器人与服务对象之间具备智能谈话能力,实现基本的与人交流的语音功能。服务型机器人的自导航与避障技术:即使机器人行走于各种静态和动态的物体之间,完成自动避障。路径规划,最优规划等相关功能。开发服务型机器人的自建地图技术:即使机器
圈7电路原理图
342010VOL.11万方数据

中国机器人大赛及其机器人技术发展作者:
作者单位:
刊名:
英文刊名:
年,卷(期):陈万米上海大学电子制作ELECTRONICS DIY2010(11)
本文链接:http://d..cn/Periodical_dzzz201011010.aspx