二、DPH-I型智能动平衡机
一、系统主要特点与工作原理
1、主要特点
该设备是一种创新的基于虚拟测试技术的智能化动平衡实验系统,能在一个硬支承
的机架上不经调整即可实现硬支承动平衡的A,B,C尺寸法解算和软支承的影响系数法
解算,既可进行动平衡校正亦可进行静平衡校正,本系统利用高精度的压电晶体传感器
进行测量,采用先进的计算机虚拟测试技术、数字信号处理技术和小信号提取方法,达
到智能化检测目的。本系统不但能得出实验结果,而且通过动态实时检测曲线了解实验
的过程,通过人机对话的方式生动、形象地完成检测过程。从而非常适用于教学动平衡
实验。
2、工作原理及系统组成
转子动平衡检测是一般用于轴向宽度B与直径D的比值大于0.2的转子(小于0.2的转
子适用于静平衡)。转子动平衡检测时,必须同时考虑其惯性力和惯性力偶的平衡,即
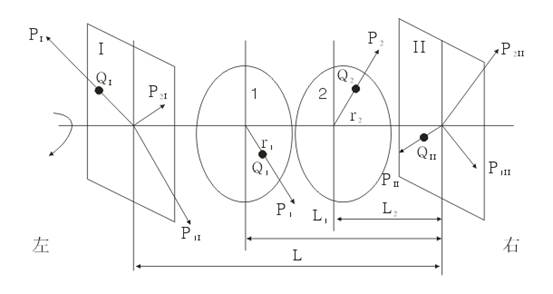
Pi=0,Mi=0。如图2-9-1所示,设一回转构件的偏心重Q1及Q2分别位于平面1和平面2
内,r1及r2为其回转半径。当回转体以等角速度回转时,它们将产生离心惯性力P1及P2,
形成一空间力系。
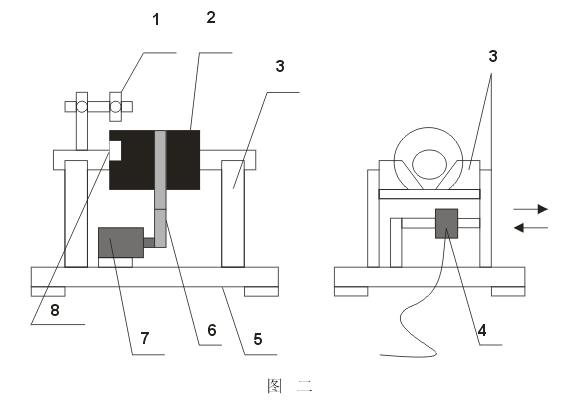
1、光电传感器 2、被试转子 3、硬支承摆架组件
4、压力传感器 5、减振底座 6、传动带
7、电动机 8、零位标志
由理论力学可知,一个力可以分解为与它平行的两个分力。因此可以根据该
回转体的结构,选定两个平衡基面I和II作为安装配重的平面。将上述离心惯性力
分别分解到平面I和II内,即将力P1及P2分解为P1I及P2I(在平面I内)及P1II及P2II
(在平面II内)。这样就可以把空间力系的平衡问题转化为两个平面汇交力系的平
衡问题了。显然,只要在平面I和II内各加入一个合适的配重QI和QII,使两平面内
的惯性力之和均等于零,构件也就平衡了。
DPH-I型智能动平衡机结构如图二所示。测试系统由计算机、数据采集器、高
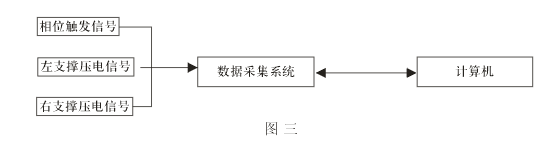
灵敏度有源压电力传感器和光电相位传感器等组成。如图二,当被测转子在部件上被拖动旋转后,由于转子的中心惯性主轴与其旋转轴线存在偏移而产生不平衡离心力,迫使支承做强迫震动,安装在左右两个硬支撑机架上的两个有源压电力传感器感受此力而发生机电换能,产生两路包含有不平衡信息的电信号输出到数据采集装置的两个信号输入端;与此同时,安装在转子上方的光电相位传感器产生与转子旋转同频同相的参考信号,通过数据采集器输入到计算机。
计算机通过采集器采集此三路信号,由虚拟仪器进行前置处理,跟踪滤波,
幅度调整,相关处理,FFT变换,校正面之间的分离解算,最小二乘加权处理等。
最终算出左右两面的不平衡量(克),校正角(度),以及实测转速(转/分)。
与此同时,给出实验过程的数据处理方法,FFT方法的处理过程,曲线的变化
过程,使同学们加深印象,一目了然。
二、安装驱动软件及应用软件
1. 安装驱动程序
系统在WINDOWS 98/2000/ME 下工作,使用时需要安装设备驱动程序。一台计算机在第一次连接USB口时需要人工安装设备驱动程序,以后再连接系统时设备驱动程序会自动安装。
下面介绍人工安装设备驱动程序的方法.
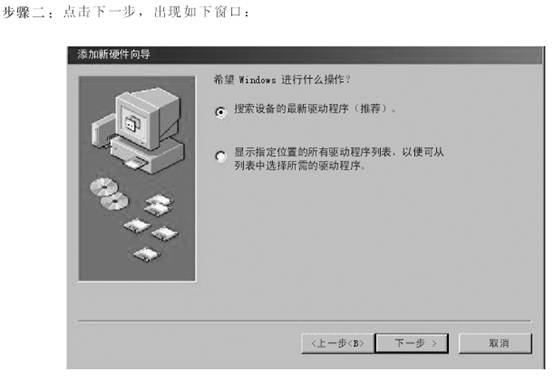
步骤一:
当计算机在开机状态, WINDOWS正常运行时, 将USB电缆航空插座端插入动平衡机面板(电缆另一端应预先插在计算机任意USB插口上)。此时屏幕出现“找到新的硬件设备”,接着出现如下提示窗口:
2.安装应用软件
进入CD-ROM驱动器,在“智能动平衡实验系统安装程序”中运行SETUP安装程序,根据提示进行安装,安装完成后,在程序列表中出现执行应用程序,安装完毕。
三、软件运行环境及主要软件界面操作介绍
1.系统运行环境要求
586以上微机,32M内存,彩色显示器
Win98,Windows2000,WinNT操作系统
2.软件界面介绍
本软件的目的是为了检测和演示如何对转子进行动平衡的,因此功能很强大,不但能找到偏心的位置和偏心量的大小,而且可演示整个检测处理过程。下面将对软件界面作一个简单的介绍:
● 系统主界面介绍
系统进入所需要的时间由计算机系统的配置而定,计算机系统的配置越好,软件的启动速度越快,启动进度由上面绿色滚动条指示。通过点击启动界面可进入系统主界面。
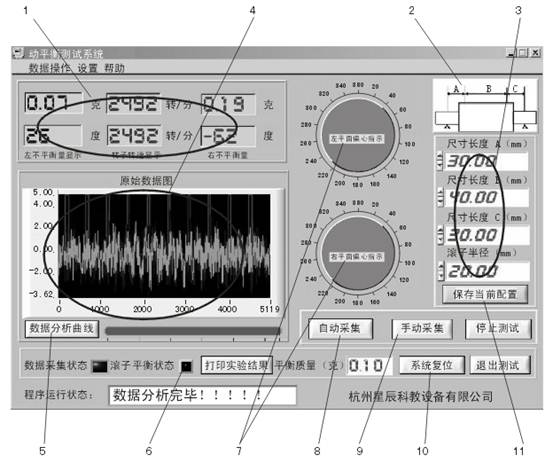
1、 测试结果显示区域,包括左右不平衡量显示、转子转速显示、不平衡方位显示。
2、 转子结构显示区,用户可以通过双击当前显示的转子结构图,直接进入转子结构选择图,选择需要的转子结构。
3、 转子参数输入区域,在进行计算偏心位置和偏心量时,需要用户输入当前转子的各种尺寸,如图上所示的尺寸,在图上没有标出的尺寸是转子半径,输入数值均是以毫米(mm)为单位的。
4、 原始数据显示区,该区域是用来显示当前采集的数据或者调入的数据的原始曲线,在该曲线上用户可以看出机械振动的大概情况,根据转子偏心的大小,在原始曲线上用户可以看出一些周期性的振动情况。
5、数据分析曲线显示按钮:通过该按钮可以进入详细曲线显示窗口,可以通过详细曲线显示窗口看到整个分析过程。
6、指示出检测后的辊子的状态,灰色为没有达到平衡,蓝色为已经达到平衡状态。平衡状态的标准通过“允许不平衡质量”栏由用户设定。
7、左右两面不平衡量角度指示图,指针指示的方位为偏重的位置角度。
8、自动采集按钮,为连续动态采集方式,直到停止按钮按下为止。
9、单次采集按钮。
10、复位按钮,清除数据及曲线,重新进行测试。
11、工件几何尺寸保存按钮开关,点击该开关可以保存设置数据(重新开机数据不变)。
● 模式设置界面
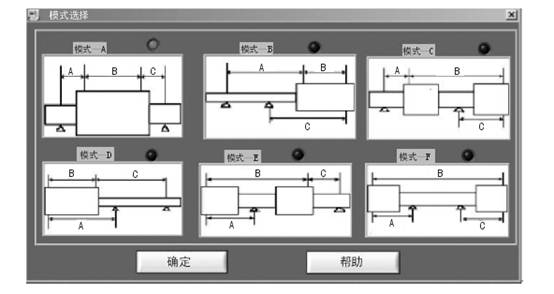
如上图所示,图上罗列了一般转子的结构图,用户可以通过鼠标来选择相应的转子结构来进行实验。每一种结构对应了一个计算模型,用户选择了转子结构同时也选择了该结构的计算方法。
● 采集器标定窗口

用户进行标定的前提是有一个已经平衡了的转子,在已经平衡了的转子上的A,B两面加上偏心重量,所加的重量(不平衡量)及偏角(方位角)用户从“标定数据输入窗口”输入,启动装置后,用户通过点击“开始标定采集”来开始标定的第一步,这里需要注意的是所有的这些操作是针对同一结构的转子进行标定的,以后进行转子动平衡时应该是同一结构的转子,如果转子的结构不同
则需要重新标定。“测试次数”由用户自己设定,次数越多标定的时间越长,一般5~10次。“测试原始数据”栏只是用户观察数据栏,只要有数据表示正常,反之为不正常。“详细曲线显示”用户可观察标定过程中数据的动态变化过程,来判断标定数据的准确性。
在数据采集完成后,计算机采集并计算的结果位于第二行的显示区域,用户可以将手工添加的实际不平衡量和实际的不平衡位置填入第三行的输入框中,输入完成并按“保存标定结果”按钮,“退出标定”完成该次标定。
● 数据分析窗口
按“数据分析曲线”键,得如下窗口,可详细了解数据分析过程。
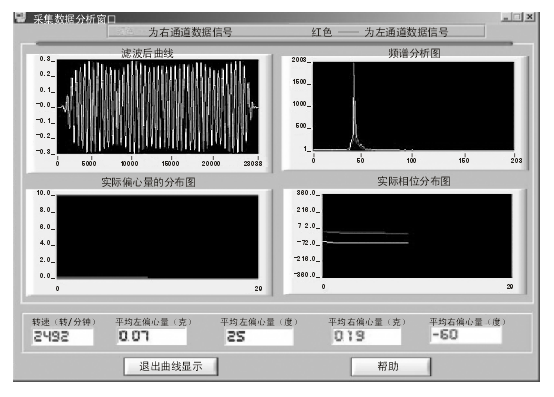
※滤波器窗口:显示加窗滤波后的曲线,横坐标为离散点,纵坐标为幅值。
※频谱分析图:显示FFT变换左右支撑振动信号的幅值谱,横坐标为频率,纵坐标为幅值。
※实际偏心量分布图:自动检测时,动态显示每次测试的偏心量的变化情况。横坐标为测量点数,纵坐标为幅值。
※实际相位分布图:自动检测时,动态显示每次测试的偏相位角的变化情况。横坐标为测量点数,纵坐标为偏心角度。
※最下端指示栏指示出每次测量时转速、偏心量、偏心角的数值。
四、主要技术性能与参数
1. 主要技术性能
1)虚拟智能化测试,仪器界面
2)硬支承动平衡采用A、B、C尺寸解算,永久定标具有六种支承方式
3)运行状态实时提示
4)具有剩余不平衡量允差设置功能,自动提示合格
2. 主要技术参数
1)工件质量范围(kg):0.1~5
2)工件最大外径(mm):Φ260
3)两支承间距离(mm):50~400
4)支承轴径范围(mm):Φ3~30
5)圈带传动处轴径范围(mm):Φ25~80
6)电机功率(kw):0.12
7)平衡转速:约1200转/分,2500转/分两档
8)最小可达残余不平衡量≤0.3g mm/kg
9)一次减低率:≥90%
10) 测量时间:最长3s
五、动平衡实验操作步骤
1. 平衡件模式选择
点击“动平衡实验系统”, 出现“动平衡实验系统”的虚拟仪器操作前面板,点击左上“设置”菜单功能键的“模式设置”功能,屏幕上出现模型ABCDEF六种模型。根据动平衡元件的形状,选择其模型格式。选中的模型右上角的指示灯变红,点击“确定”,回到虚拟仪器操作前面扳。在前面扳右上角就会显示所选定的模型形态。量出你所要平衡器件的具体尺寸,并根据图示平衡件的具体尺寸,将数字输入相应的A、B、C、框内。点击“保存当前配置”键,仪器就能记录、保存这批数据,作为平衡件相应平衡公式的基本数据。只要不重新输入新的数据,此格式及相关数据不管计算机是否关机或运行其它程序,始终保持不变。
2. 系统标定
1) 点击“设置”框的“系统标定”功能键,屏幕上出现仪器标定窗口。将两块2克重的磁铁分别放置在标准转子左右两侧的零度位置上,在标定数据输入窗口框内,将相应的数值分别输入“左不平衡量”、“左方位”;“右不平衡量”及“右方位”的数据框内(按以上操作,左、右不平衡量均为2 克,左、右方位均是零度),启动动平衡试验机,待转子转速平稳运转后,点击“开始标定采集”,下方的红色进度条会作相应变化,上方显示框显示当前转速,及正在标定的次数,标定值是多次测试的平均值。
2)平均次数可以在“测量次数”框内人工输入,一般默认的次数为10次。标定结束后应按“保存标定结果”键,完成标定过程后,按“退出标定”键,即可进入转子的动平衡实际检测。标定测试时,在仪器标定窗口“测试原始数据”框内显示的四组数据,是左右两个支撑输出的原始数据。如在转子左右两侧,同一角度,加入同样重量的不平衡块,而显示的两组数据相差甚远,应适当调整两面支撑传感器的顶紧螺丝,可减少测试的误差。
3. 动平衡测试
1)手动(单次)
手动测试为单次检测,检测一次系统自动停止,并显示测试结果。
2)自动(循环)
自动测试为多次循环测试,操作者可以看到系统动态变化。按“数据分析曲线”键,可以看到测试曲线变化情况。需要注意的是:要进行加重平衡时,在停止转子运转前,必须先按“停止测试”键,使软件系统停止运行,否则会出现异常。
4. 实验曲线分析
在数据采集过程中,或在停止测试时,都可在前面板区按“数据分析曲线”键,计算机屏幕会切换到“采集数据分析窗口”,该窗口有四个图形显示区和5个数字显示窗口,它们分别是“滤波后曲线”、“频谱分析图”、“实际偏心量分布图”和“实际相位分布图”四个图形显示区和转速,左右偏心量及偏心角五个数字显示窗口,该分析窗口的功能主要是将实验数据的整个处理过程,详细的展示在学生面前,使学生进一步认识到如何从一个混杂着许多干扰信号的原始信号中,通过数字滤波、FFT信号频谱分析等数学手段提取有用的信息,该窗口不仅显示了处理的结果,还交代了信号处理的演变过程,这对培养学生解决问题、分析问题的能力是很有意义的。在自动测试情况下(即多次循环测试),从“实际偏心量分布图”和“实际相位分布图”可以看到每次测试过程当中的偏心量和相位角的动态变化,曲线变化波动较大说明系统不稳定要进行调整,调整的方法详见“常见问题”。
5. 平衡过程
本实验装置在做动平衡实验时,为了方便起见一般是用永久磁铁配重,作加重平衡实验,根据左、右不平衡量显示值(显示值为去重值),加重时根据左、右相位角显示位置,在对应其相位180度的位置,添置相应数量的永久磁铁,使不平衡的转子达到动态平衡的目的。在自动检测状态时,先在主面板按“停止测试”键,待自动检测进度条停止后,关停动平衡实验台转子,根据实验转子所标刻度,按左、右不平衡量显示值,添加平衡块,其质量可等于或略小于面板显示的不平衡量,然后,启动实验装置,待转速稳定后,再按“自动测试”,进行第二次动平衡检测,如此反复多次,系统提供的转子一般可以将左、右不平衡量控制中0.1克以内。在主界面中的“允许偏心量”栏中输入实验要求偏心量(一般要求大于0.05克)。当“转子平衡状态”指示灯由灰色变蓝色时,说明转子已经达到了所要求的平衡状态。
由于动平衡数学模型计算理论的抽象理想化和实际动平衡器件及其所加平衡块的参数多样化的区别,因此动平衡实验的过程是个逐步逼近的过程。
6. 动平衡实验操作示例
1.接通实验台和计算机USB通信线,并装上密码狗,(此时应关闭实验台电源)
2.打开“测试程序界面”,然后打开实验台电源开关,并打开电机电源开关,点击开始测试。
这时应看到绿、白、蓝三路信号曲线。如没有应检查传感器的位置是否放好。
3.三路信号正常后点击退出测试,退出“测试程序”。然后双击“动平衡实验系统界面”进
入实验状态。
4.测量A、B、C及转子半径尺寸输入各自窗口,然后点击“设置”窗口进入“系统标定”界面 在标定数据输入窗口输入左、右不平衡量及左右方位度数(一般以我们给的最大重量磁钢 2g作标定,方位放在O度),数据输入后点击“开始标定采集”窗口开始采集。这时可以点击“详细曲线显示”窗口,显示曲线动态过程。等测试十次后自动停止测试。点击“保存标定结果”窗口,回到原始实验界面,开始实验。
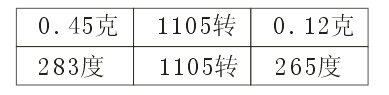
5.点击“自动采集”窗口,采集35次数据比较稳定后点击“停止测试”窗口,以左右放1.2克为例,左边放在0度,右边放在270度。这时数据显示为:
左 右
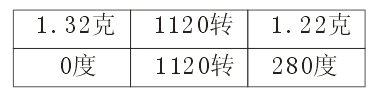
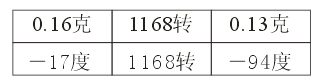
然后在左边180度处放1.2克,在右边280度对面(280+180360=100)100度处放1.2克,点击
“自动采集”。开始采集35次后点击停止测试。这时数据为:
左 右
若我们设定左、右不平衡量≤0.3克时即为达到平衡要求。这时左边还没平衡右边已平衡。在左边283度对面103度处放0.4克,点击自动采集,采集35次后数据为:
这时两边都≤0.3克,“滚子平衡状态”窗口出现红色标志,点击“停止测试”。
打开“打印试验结果”窗口,出现“动平衡试验报表”,可以看到整个实验结果,结束实验。
六. 常见问题与解决
1)程序运行时,出现“设备找不到”
检查USB接口是否正常,是否安装USB驱动软件。如末安装USB驱动软件,可利用本公司提供的光盘软件,进行安装。(某些计算机有多个USB接口,一个接口不行,可另接一个插口试验。)
2)测试曲线不显示
检查传感器安装位置
A.相位信号光电传感器应垂直照射于零位信号黑条上,距离约80mm,调整传感器边上的电位器旋钮,使黑条在进出光点位置时,其指示发光二极管应明暗闪烁。
B.适当调整左右支架上的测振压电传感器预紧力螺母。
C.启动动平衡试验机,根据显示曲线,适当调整光电传感器的上下位置和灵敏度电位器,使每个红色转速方波脉冲信号的脉宽尽可能相等。
3)测试过程中出现“转速异常”
调整相位信号光电传感器,应垂直照射于零位信号黑条上,距离约80mm,调整传感器边上的电位器旋钮,使黑条在进出光点位置时,其指示发光二极管应明暗闪烁。
4)测试过程中由于操作失误出现系统死机
原因多数是USB通讯信号堵塞,插拔USB接口,可恢复系统正常运行。
※ 重要提示
1. 动平衡实验台与计算机连接前必须先关闭实验台电机电源,插上USB通讯线时再开启电源。在实验过程中要插拔USB通讯线前同样应关闭实验台电机电源以免因操作不当而损坏计算机。
2. 系统提供一套测试程序,实验之前进行测试,特别是装置进行搬运或进行调整发生后,请运行安装程序中提供的“测试程序”。运行转子机构,从曲线窗口中可以看到三条曲线(一条方波曲线、两条振动曲线),如果没有方波曲线(或曲线不是周期方波),则调整相位传感器使出现周期方波信号。如果没有振动信号(或振动信号为一直线没有变化),则调整左右支架上的测振压电传感器预紧力螺母,使产生振动信号,三条曲线缺一不可。
如有未尽事宜,请与开发商联系。
七、思考题
1、 哪些类型的试件需要进行动平衡实验?实验的理论依据是什么?试件经动平衡
后是否还要进行静平衡,为什么?
2、 为什么偏重太大需要进行静平衡?
3、 指出影响平衡精度的一些因素。
八、动平衡实验报告
专业班级------------- 姓名-------------
指导老师-------------- 日期--------------
〈一〉 实验目的
〈二〉 实验机构及测试原理图
〈三〉 实验步骤
〈四〉实验数据
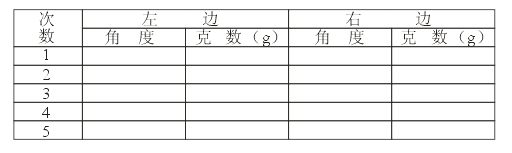
注:次数以达到平衡质量为标准。