机 电 工 程 系
PLC 课 程 设 计 报 告
题目: 基于PLC控制的机械手
__________________________________________________________
专 业:机电一体化
班 级:10机电 2班
学 号:
姓 名:
指导老师:
答辩日期:20##年 月 日
一、 课程设计的目的
1、 对所学的PLC知识的综合应用
2、 提高自学能力
3、 提高PLC控制系统的安装与调试能力
4、 提高PLC程序的设计能力,特别是对步进顺序控制编程方法的应用
5、 提高了PLC外部接线能力
二、  课程设的任务
课程设的任务
 图(1)
图(1)
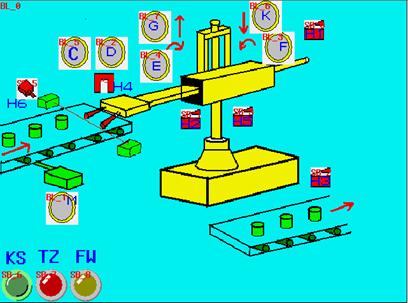
如图(1)的机械手所示,它的工作任务是将B运输带上的工件搬运到A运输带上。该机械手主要由能提供上下与左旋右旋的运动机构组成,工作过程如下:
1、 机械手位于初始位置(压合上限位和左旋限位)时,按下启动按钮SB,当物体检测H6发出信号时,机械手开始夹工件,夹紧电磁阀得电
2、 当H4被压合时,工件被夹紧,右旋电磁阀得电,机械手抓紧工件右旋,直至压合右旋限位H5。
3、 机械手下降,下降电磁阀得电,机械手下降直至压合H3。
4、 夹紧电磁阀失电,放松电磁阀得电,放工件到A运输带上,1S后认定已经放松
5、 上升电磁阀得电,机械手上升,直至压合H1。
6、 机械手向左旋,左旋电磁阀得电,机械手左旋直至压合H2,机械手回到原点,完成一个循环。
设计要求:
合理利用PLC硬件和软件的资源相结合,合理布置输入和输出端口,合理应用PLC的各种指令,使程序简单易懂便于维修,且能够完成PLC的控制要求。
控制要求:
机械手能够循环进行工作,且机械手必须在原位时才可以停车,并有断电保持的功能,以免工作过程中有意外的事故发生。
三、 对所设计的任务进行分析
1、 用PLC来实现该机械手的控制的优缺点
PLC是存储控制的一种装置,其控制功能是通过存放在存储其内的程序来实现的,若需要对控制要求做修改的话,只需改变内部的程序便可,使硬件软件化,因此它在工业控制中的地位越来越高,它具有以下特点:
可靠性高,编程简单易学,通用性强,使用方便,系统设计周期短,对生产改变适应性强,安装简单,调试方便,适应工业环境。
分析机械手的工作过程和控制要求,该工作过程可以方程若干个工作步,且各步个所需完成的功能和转换条件都非常的清晰明确,因此我们可以利用PLC步进顺序控制的方法来完成编程,且要完成断电保持的功能可以用KEEP指令来实现,即使在停电时也可以存储之前的状态,把WR区域做为中间继电器使用。
因此可以用PLC来实现机械手的控制。
2、 PLC的选型
PLC的选型与其输入,输出端子有关,开关量输出单元通常有继电器输出单元,晶体管输出单元,以及晶闸管输出单元,其各自特点如下:
A、继电器输出单元为有触点输出主式,适用于低频大功率直流或交流负荷
B、晶体管输出单元为无触点输出方式,适用于高频小功率流直流负荷。
C、晶闸管输出单元为无触点输出方式,适用于高速大功率交流负荷。
基于机械手的控制要求,继电器型是不能实现的,由于设计要求不高,控制系统比较简单,对输入与输出的端子要求不用那么多,且考虑到学校的提供的设备,因此使用OMROM_CP1H PLC即可实现,即经济右可以合理利用学校提供的设备。
I/O分配表及外部接线图
A、 I/O分配表:

B、 外部接线图

四、 程序设计及程序说明
4.1、启动与停止模块的分析
根据I/O口的分配,系统启动的按钮为0.00,当按下0.00时,W0.00得电,通过使IL与ILC自锁让整个系统进行工作,当机械手在原位且无夹物体时,按下停止按钮0.07,W0.00失电,IL与ILC互锁,控制系统便可停止工作。程序如图三(3)所示,IL与ILC的程序如图(4)所示。

图(3)


图(4)
4.2、复位模块的分析
当机械手在工作时,突然断电,此时若机械手刚好有夹住东西在作业便会造成危险,因此我们变设计了复位的功能,让机械手在断电时还能夹住东西,不造成危险,在机械手的主要工作过程的系统中,在本设计中用IL与ILC进行自锁使其工作,因此我们用KEEP在IL与ILC互锁时仍不断电的特性来使物体在断电后仍夹住,当在上电时对电路进行复位,让机械手再继续执行没完成的工作。在本设计中,在断电后先按复位键2.08,使W0.05得电,因为在断电前,以使用KEEP在每一个步骤执行时都立即保持,复位后,机械手即可按刚才没执行完的继续往下执行,复位程序程序如图(5)所示。

(复位按键)

(右旋保持、下降保持)

(放物体保持)

(上升,左旋保持)

(夹紧物体的保持)
图(5)
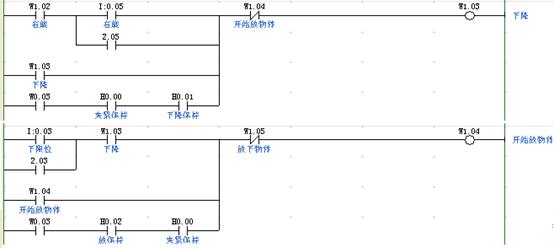
4.3、利用限位开关使机械手完成各个动作的控制分析
在本设计中,机械手的执行步骤是按顺序一步一步按照要求往下执行的,每步都是用限位开关来控制的,执行完一个循环完后再继续下一个循环。按照该设计的特点,在编写程序时采用按顺序控制的设计方法,按照动作的先后顺序进行控制。这样程序结构清晰,可读性好,对于日后在程序上的修改比较方便。本设计的机械手必须在原始位置等待启动,既上限位和左限位的限位开关的必须压住。在启动后,发出检测物体的信号(用2..06控制),机械手开始夹物体,等到加紧限位压住后(用2.04控制),机械手开始右旋,左旋限位放开(用2.02控制),到达右旋限位(用2.05控制)后就下降到达下降限位,上限位放开(用2.01控制),放下物体,带20S后再上升,到达上限位(用2.01控制)后左旋,到达左旋限位后就停下来,即回到原点,等待下一次的执行命令。在执行完上一个步骤完后用下一个步骤来停止上一个步骤。程序设计如图(6)所示。


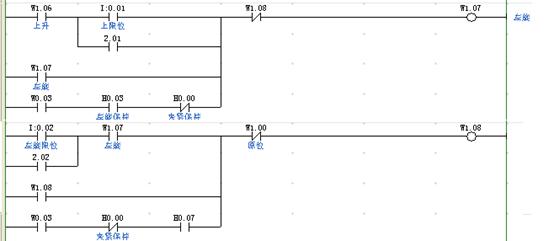
图(6)
4.4输出模块的程序设计与分析
每一个步骤在执行时都用与一个辅助继电器连接,最后再送到电磁阀来控制机械手的执行步骤,对与夹紧电磁阀在得电后要自锁住,放开电磁阀也是一样要自锁。程序设计如图(7)所示。

图(7)
五、 触摸屏的设计
在本设计程序完成的基础上,还要实现用触摸屏来模拟机械手的执行过程。本课程设计采用的是威仑通软件MT500,其中机械手的原图与限位开关,指示灯都是通过新建图库完成的。对于限位开关在设计的过程中采用的是切换开关,且采用的都是位状态的切换开关,实现限位开关的压下与放开两种状态。开始、停止、复位、检测物体都用复归型开关。画完后的图形如图(8)所示
 图(8)
图(8)
六、 课程设计的心得体会
PLC 是一种专用于工业控制的可编程逻辑控制器,需要硬件与软件的结合,在硬件方面主要通过I/O通道与工业系统连成一个整体,在软件方面在本设计中主要是用OMRONA—CP1H软件编写,实现所要达到的功能。
通过这次的课程设计,我们学会了完成一个设计所需要的步骤。首先必须的对整个设计任务做一个整体的分析,决定采用的编程方法,再对该设计所要用到的I/O口做分配,以免因为I/O口的重复而对设计造成干扰。因为在本设计中在完成机械手的一系列动作时,用到很多辅助继电器,若重复使用就会造成机械手误动作,使机械手在工作过程中造成危险。其次在完成设计任务后我们还要完善设计,即考虑所用到的指令在编写的程序里是否可行,是否会发生冲突。本设计在完成机械手基本动作外,还要考虑因为突然断电对机械手的影响。通过使用KEEP指令保持继电器时,即使停电时也能储存之前的状态,且IL与ILC 的互锁不会对KEEP产生影响。这样即使在系统突然断电后,在上电时按下复位按钮机械手即可继续完成没完成的动作。最后是在做触摸屏时要考虑所用按钮的性质,开关,复位的按钮要用复归型按钮,限位开关则用切换型开关,且触摸屏要尽量模拟现实状态。
通过本课程设计,使我们对PLC又有了进一步的理解与掌握,把我们所学的知识应用到实际中,提高了PLC控制系统的安装与调试能力,有自学了触摸屏提高了自学能力,增加了我们的知识面。编程需要有紧密的逻辑思维,在这课程设计中,也提高了我们考虑问题的周密性和逻辑紧密性。
第二篇:PLC机械手毕业设计(论文)开题报告
洛阳理工学院
毕业设计(论文)开题报告