目录
《可编程逻辑控制器》课程设计任务书 ............................................ 1
摘要 .................................................................................................... 3
一 题目分析及其硬件设计................................................................. 4
1.1 应用背景与需求 ......................................................................... 4
1.2 交通灯示意图 ............................................................................. 4
1.3 PLC选型及I/O分配 ................................................................... 4
1.4 外围接线图 ................................................................................ 5
二 时序图 ........................................................................................... 6
三 梯形图 ........................................................................................... 6
3.1 顺序功能图 .................................................................................. 6
四 工作过程分析................................................................................ 8
五 总结............................................................................................... 8
参考文献............................................................................................. 8
附录 .................................................................................................... 9
重庆邮电大学移通学院自动化系 自动化专业 PLC课程设计
《可编程逻辑控制器》课程设计任务书
引言:《可编程逻辑控制器》课程设计是该课程的一个重要教学环节,既有别于毕业设计,又不同于课堂教学。它需要学生统筹运用所学基本理论、基本方法对现实生活中的实际系统进行设计和调试。
设计题目一:十字路口自助式交通灯的控制
本设计要求熟练使用OMRON公司的CPM1A系列产品各基本指令和部分应用指令,根据控制要求进行PLC梯形图编程,解决十字路口交通灯控制的问题。
系统工作过程说明:
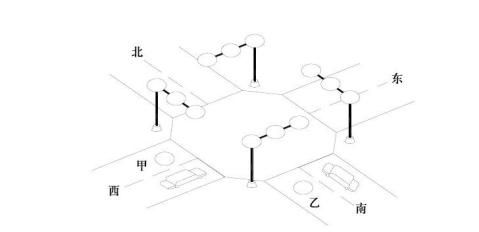
图1是一个十字路口的交通灯模拟示意图,R、Y、G分别代表红灯、黄灯、绿灯。红灯亮表示相应方向的车停止行进,绿灯亮表示相应方向的车可以通行,绿灯闪烁、黄灯亮表示短暂的时间后相应方向的车将改变行进状态,提醒司机朋友做好准备。

图1 十字路口的交通灯模拟示意图
1
重庆邮电大学移通学院自动化系 自动化专业 PLC课程设计
如图1所示,本设计具体要求完成以下工作过程:
(1)在只需要纵向行驶的交通系统中,需要考虑人行横道的控制,这种情况下人行横道通常用按钮进行启动
(2)假设东西方向是车行道,南北方向是人行横道,正常情况下为车辆行驶,如果有行人要过交通路口,先要按动按钮,等到绿灯亮时,方可通过,此时东西方向车道上红灯,延迟一段时间后,人行横道的红灯亮,车道上的绿灯亮。
(3)按下按钮后,给车道上的车辆5S的反应时间,之后车道绿灯闪烁5S,熄灭维持35S,绿灯闪烁后车道黄灯亮起维持5S,到5S时车道红灯亮起,时间为30S。
(4)当车道黄灯熄灭后,人行道红灯由亮转为熄灭,熄灭持续30S,同时绿灯亮起25S,再闪烁5S后熄灭。
(5)车道两侧有两个按钮,当行人按下一侧按钮时,在一个循环周期内行人再按按钮无效,一个循环周期过后,若有行人再按下按钮,交通灯控制重复。
(6)东西绿灯和南北绿灯不能同时亮,东西红灯和南北红灯不能同时亮,否则则自动关闭系统并发出报警信号。
设计步骤:
(1)对系统进行需求分析,确定I/O点数,分配I/O地址;
(2)画出PLC控制接线图;
(3)绘制PLC梯形图;
(4)简述工作过程。
2
重庆邮电大学移通学院自动化系 自动化专业 PLC课程设计
摘要
本设计是关于PLC控制系统的一个在日常生活中的应用。随着时代的发展进步,交通越来越发达,交通事故给人们带来了许多的烦劳,过马路成为了行人的一个头疼的事。现代科技成为了不可或缺的一部分,现代理论的控制将带领着时代的进步。像PLC,单片机等现在可控制产品的产生,将带给人们生活中的诸多不便。
分析了现代城市交通的控制和管理问题的现状,结合城乡交通的实际情况简述了交通灯控制系统的控制原理,本设计是用OMRON公司的
CPM1A系列PLC维持城市交通十字路口的交通秩序,在每个方向都有红、黄、绿三种指示灯,信号灯受一个启动开关控制,当按下启动按钮,信号灯系统开始工作,直至按下停止按钮开关,系统停止工作。本设计证实,采用PLC对交通指挥信号灯的自动控制是完全可行的。在实际应用中,采用PLC控制城市交通指挥信号灯,还能容易的随时修改控制程序,以改变各信号灯的工作时间和工作状态,满足不同交通路况的要求。与继电器或硬件逻辑电路控制系统相比,PLC控制系统具备更大的灵活性和通用性。
通过对交通的了解,设计适当的应用电路,成功完成对交通灯的控制。希望能给城市的交通带来方便,给过往的行人带来帮助。
关键词:PLC;OMRON;交通;信号灯;自动控制
3
重庆邮电大学移通学院自动化系 自动化专业 PLC课程设计
一 题目分析及其硬件设计
1.1 应用背景与需求
城市交通指挥系统中的许多设备也需要实现自动化控制,PLC在其中的应用也越来越多。交通指挥信号灯的控制,它用于维持城市交通道路十字路口的交通秩序,在每个方向都有红、黄、绿三种指挥灯,信号灯受一个启动开关控制,当按下启动按钮,信号灯系统开始工作,直至按下停止按钮开关,系统停止工作。
1.2 交通灯示意图
图1.1就是城市交通指挥信号灯的一个简单示意图。设计就是为此系统为基础研究PLC在交通指挥信号灯自动控制中的应用问题
图1.1 交通指挥信号灯指示图
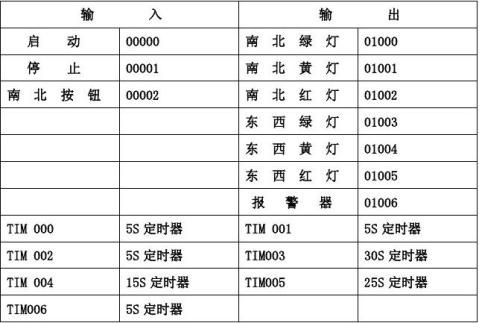
1.3 PLC选型及I/O分配
根据对交通指挥信号灯控制系统控制的要求的分析,系统采用自动工作方式,其输入信号有系统开启;输出信号有东西方向、南北方向各两组指示灯驱动信号和故障指示灯驱动信号。由于每一方向的两组指示灯中,同种颜色的指示灯同时工作,为节省输出点数,可采用并联输出方法。由此可知,系统所需要的输入点数为2,输出点数为7,全部是开关量。根据以上分析,此系统属于小型单机控制系统,其中控制器的选型范围比较宽,可以选用OMRON公司的CPM1A系列PLC。这里选择CPM1A-20CDR-D型机作为控制器构成交通指挥信号灯的控制系统。PLC的I/O分配见表1-1。
4
重庆邮电大学移通学院自动化系 自动化专业 PLC课程设计
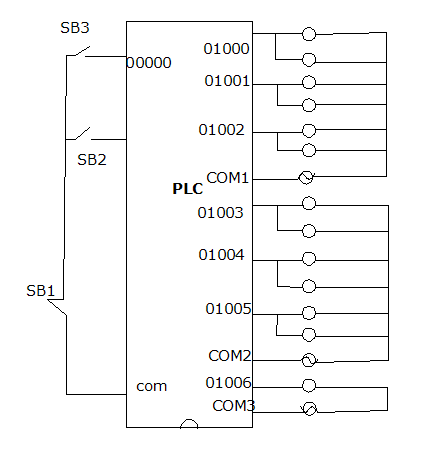
1.4 外围接线图
根据I/O地址的定义,PLC外部输入输出信号的接线如图2-2所示。
其中,每一个方向的两组指示灯中,同种颜色的指示灯并联,用PLC的同一个输出端口,从而减少了对PLC输出点数目的要求。系统的I/O接线图
图1-2
5
重庆邮电大学移通学院自动化系 自动化专业 PLC课程设计
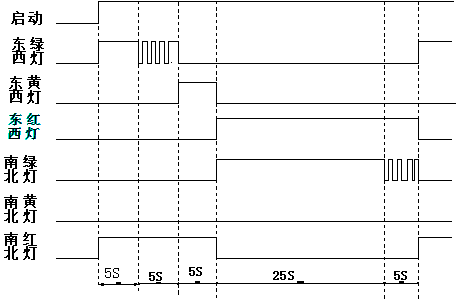
二 时序图
三 梯形图
3.1 顺序功能图
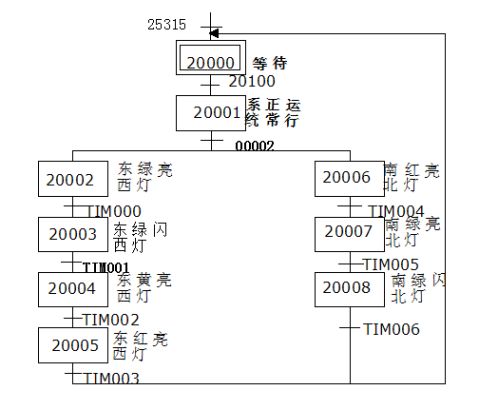
6
重庆邮电大学移通学院自动化系 自动化专业 PLC课程设计
3.2梯形图
7
重庆邮电大学移通学院自动化系 自动化专业 PLC课程设计
四 工作过程分析
(1)在只需要纵向行驶的交通系统中,需要考虑人行横道的控制,这种情况下人行横道通常用按钮进行启动。
(2)假设东西方向是车行道,南北方向是人行横道,正常情况下为车辆行驶,如果有行人要过交通路口,先要按动按钮,等到绿灯亮时,方可通过,此时东西方向车道上红灯,延迟一段时间后,人行横道的红灯亮,车道上的绿灯亮。
(3)按下按钮后,给车道上的车辆5S的反应时间,之后车道绿灯闪烁5S,熄灭维持35S,绿灯闪烁后车道黄灯亮起维持5S,到5S时车道红灯亮起,时间为30S。
(4)当车道黄灯熄灭后,人行道红灯由亮转为熄灭,熄灭持续30S,同时绿灯亮起25S,再闪烁5S后熄灭。
(5)车道两侧有两个按钮,当行人按下一侧按钮时,在一个循环周期内行人再按按钮无效,一个循环周期过后,若有行人再按下按钮,交通灯控制重复。
(6)东西绿灯和南北绿灯不能同时亮,东西红灯和南北红灯不能同时亮,否则则自动关闭系统并发出报警信号。
五 总结
课程设计是我们专业课程知识综合应用的实践训练,着是我们迈向社会,从事职业工作前一个必不少的过程.”千里之行始于足下”,通过这次课程设计,我深深体会到这句千古名言的真正含义。通过这次模具设计,本人在多方面都有所提高。通过这次课程设计,综合运用本专业所学课程的理论知识进行一次十字路口自助式交通灯系统设计工作的实际训练从而培养和提高学生独立工作能力,巩固与扩充了PLC设计等课程所学的内容,掌握PLC设计的方法和步骤,掌握PLC设计的基本的控制理论,怎样确定设计方案,提高了理论知识,绘图能力,熟悉了规范和标准,独立思考的能力也有了提高。在这次设计过程中,发现自己平时学习的不足和薄弱环节,从而加以弥补。其中也少不了老师精心指导。由于本人知识的局限性,设计中难免有所不足,希望老师提出和指导
参考文献
【1】 徐世许等.可编程序控制器——原理、应用、网络.中国科技大学出版
社.2007.1
【2】 互联网
8
重庆邮电大学移通学院自动化系 自动化专业 PLC课程设计
附录
语句表
LD 00000
OR 20100
ANDNOT 00001
OUT 20100
LD 25315
LD 20005
AND TIM003
ORLD
LD 20008
AND TIM006
ORLD
OR 20000
ANDNOT 20001
ANDNOT 01006
OUT 20000
LD 20000
AND 20100
OR 20001
ANDNOT 20002
ANDNOT 20006
OUT 20001
LD 20001
AND 00002
OR 20002
ANDNOT 20003
OUT 20002
TIM 000 #0050
9
重庆邮电大学移通学院自动化系 自动化专业 PLC课程设计
LD 20002
AND TIM000
OR 20003
ANDNOT 20004
OUT 20003
TIM 001 #0050
LD 20003
AND TIM001
OR 20004
ANDNOT 20005
OUT 20004
TIM 002 #0050
LD 20004
AND TIM002
OR 20005
ANDNOT 20000
OUT 20005
TIM 003 #0300
LD 20001
AND 00002
OR 20006
ANDNOT 20007
OUT 20006
TIM 004 #0150
LD 20006
AND TIM004
OR 20007
ANDNOT 20008
OUT 20007
10
重庆邮电大学移通学院自动化系 自动化专业 PLC课程设计
TIM 005 #0250
LD 20007
AND TIM005
OR 20008
ANDNOT 20000
OUT 20008
TIM 006 #0050
LD 20007
LD 20008
AND 25502
ORLD
OUT 01000
LD 20001
OR 20006
OUT 01002
LD 20001
OR 20002
LD 20003
AND 25502
ORLD
OUT 01003
LD 20004
OUT 01004
LD 20005
OUT 01005
LD 01000
AND 01003
LD 01002
AND 01005
11
重庆邮电大学移通学院自动化系 自动化专业 PLC课程设计
ORLD
OUT 01006
END(01)
12
第二篇:PLC综合课程设计报告
PLC综合课程设计报告
一、 课程设计的性质,目的和要求:
(一).课程设计性质:
本次课程设计教学的主要任务是在我们在学完《可编程序控制器》理论课程后,进行的实践教学。通过课程设计一方面验证所学的基本理论知识,同时培养自己的基本操作技能与设计能力,使得课堂上学的理论在实践中灵活运用。
(二)目的:
通过高速计数功能的应用,PLC对自动刀库管理控制系统的设计与实现,以及上位机监控系统的设计,使学生能熟练掌握PLC的基本知识和程序设计、PLC特殊功能应用以及组态监控界面的开发,增强对所学专业知识横向联系和纵向扩展的能力。
(三)要求:
1、具备相应的电子、电路及电气技术方面的知识;
2、掌握PLC内存分配及基本指令、常用指令的编程;
3、了解PLC对脉冲信号的控制功能;
4、具备对PLC应用指令的自学及应用能力。
5、了解PLC控制系统的设计过程;
6、掌握组态软件的应用。
二、设计的内容:
1、基于高速计数的自动装瓶机PLC控制系统设计。
2、基于PLC的自动刀具库管理控制系统的设计。
3、学习组态软件的使用,并通过组态软件开发上位机监控系统,实现对自动装瓶系统或刀具库管理控制系统的上位机监控。
三、设计方案论证
(一)基于高速计数的自动装瓶机PLC控制系统设计。
1.1控制要求:
每计1000个输入脉冲产生一次中断,计够10000个脉冲时清零,重复执行。中断子程序每1000个脉冲计一个数[当高速计数器当前值为整千时],并将相应数字1~9输出到数码显示器上;设计一个装瓶机自动控制系统,当高速计数器当前值为整千时,换瓶机运行3秒,完成换瓶控制,换瓶时计数应停止;当第十次换瓶结束后,装箱机运行5秒,完成装箱控制。依次循环。
1.2设计思路
根据对自动装瓶机PLC控制系统要求的分析,系统采用自动工作方式,即只需要将高速脉冲接入到CPM1A的00000输入端即可,PLC一上电,高速计数即开始工作计数,外部的输入信号只需一个复位信号,其地址为00006,。输出信号共有6个,其中4个接到数码管,作输出显示,另外两个接到交通灯区的红灯和绿灯上,绿灯亮3秒表示换瓶机运行,绿灯亮10次共30秒,红灯亮,红灯亮5秒表示装箱机运行,高速计数器复位,采用软件复位的方式。至此一个循环结束。由此可知,系统所需的输入点数为2,输出点数为6,全部是开关量。由于高数脉冲频率较高,因此在换瓶时计数并没有停止,但这并不影响系统的正常运行,但是在计数上可能稍有些偏差。
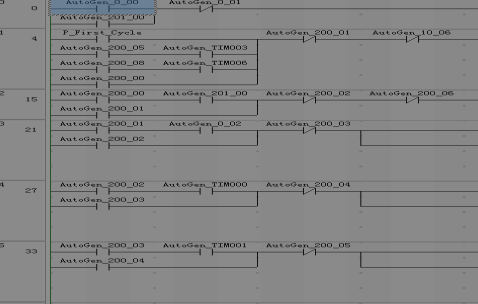
1.3功能流程图
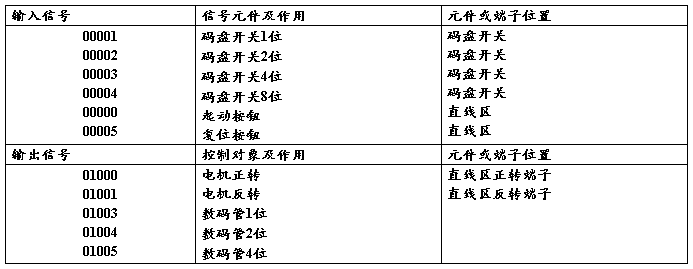
1.4I/O分配表:
根据控制要求,由于采取软件复位,可知系统所需的输入点数为2,输出点数为6, PLC机型的选择上,本设计选取的是欧姆龙公司生产的小型整体式可编程控制器CPM1A,它的性能价格比很高,在小规模控制中获得广泛应用。因此选择PLC的机型为CPMA10点型的PLC。
输入 输出
输入元件 输入地址 输出元件 输出地址
脉冲 00000 数码管 01000
手动复位按钮 00006 01001
01002
01003
绿灯 01004
红灯 01005
1.5元件明细表
在此系统中,所用到的元件为:

1.6硬件接线图
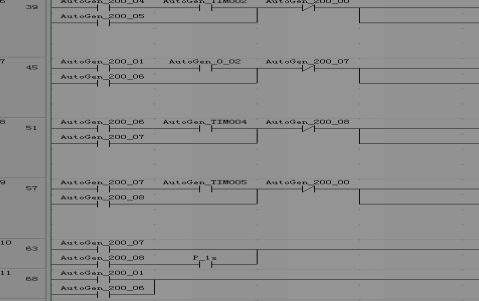
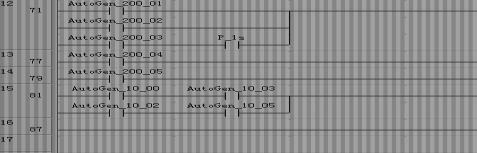
1.7控制梯形图
PLC的程序设计环境:
PLC的编程主要是通过编程器或用PLC生产厂家提供的编程软件来完成的。每个PLC公司都有自己的编程器,一般比较小,而且比较轻,适合在现场使用。但是这种编程器只能使用助记符语言对PLC进行编程,而且由于屏幕较小,每次只能显示一、两行程序,难于对程序从整体上分析。PLC公司提供的编程软件则能使用梯形图、助记符或功能图语言等进行编程。通过编程软件,不仅能从宏观上对程序进行编辑和分析,而且还能对程序的运行情况进行监视。
进入CX-Programmer初始界面后,在【文件】下拉菜单中,单击“新建”菜单项,选择创建一个新文件。在【设备名称】中填写设备名称,设备类型选择PLC的类型,然后单击设定按钮选择CPU的类型,单击确定后,即可进入梯形图编程界面,开始编程。程序编写完成后,下一步就可进行编译、链接和调试了。如果编译没有错误,就可以进行在线运行。在编译过程中,如果出现错误要进行修改时,我们既可以在梯形图编程下修改,也可在助记符方式下修改。编译完成,没有语法错误,可加载程序到PLC,进行在线运行。
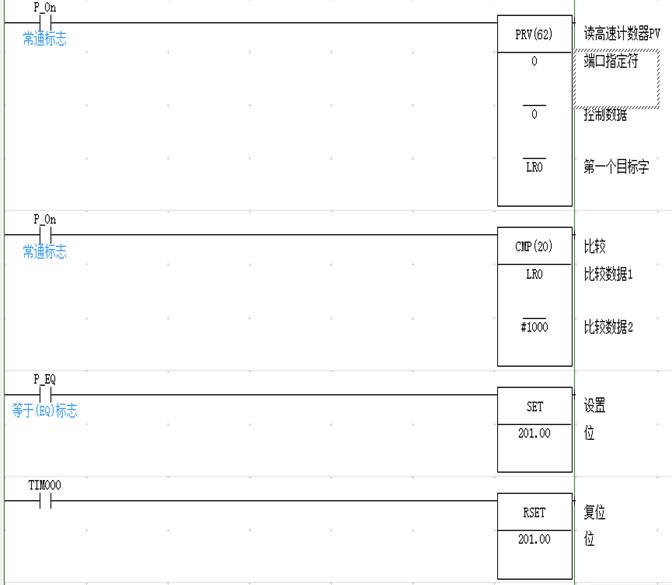

1.8 指令表:
LD P_On
PRV(62) 0
0
LR0
LD P_On
CMP(20) LR0
#1000
LD P_EQ
SET 201.00
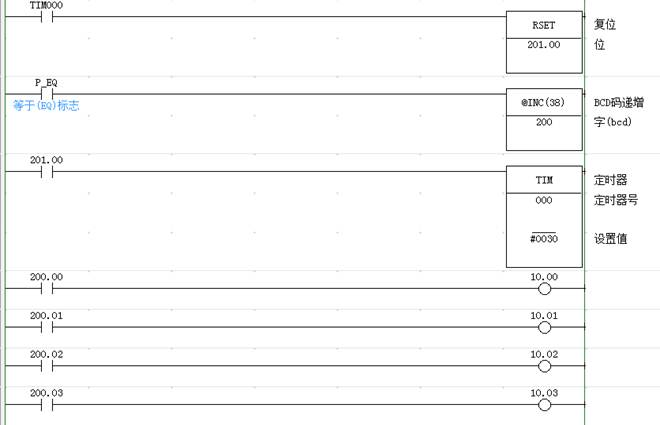
LD TIM000
RSET 201.00
LD P_EQ
@INC(38) 200
LD 201.00
TIM 000 #0030
LD 200.00
OUT 10.00
LD 200.01
OUT 10.01
LD 200.02
OUT 10.02
LD 200.03
OUT 10.03
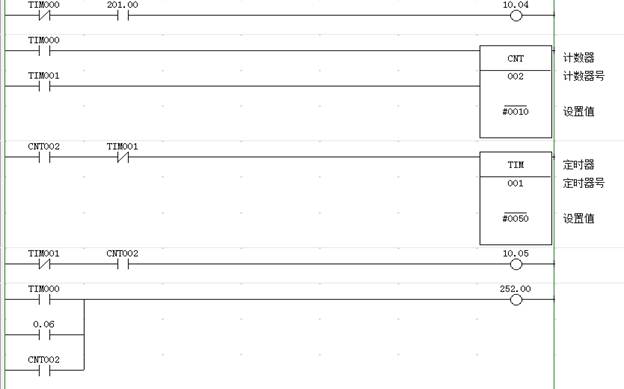
LDNOT TIM000
AND 201.00
OUT 10.04
LD TIM000
LD TIM001
CNT 002
#0010
LD CNT002
ANDNOT TIM001
TIM 001 #0050
LDNOT TIM001
AND CNT002
OUT 10.05
LD TIM000
OR 0.06
OR CNT002
OUT 252.00 .
END(01)
1.9设计结果与分析:
通过前期对控制要求的分析与论证,慢慢的确定了系统的整体控制方案与设计的整体思路,在计算机上通过编程软件编程,并上机进行调试,实现了基本的控制功能,但程序仍有部分不完善的地方,通过联机调试,即和PLC进行实际的链接,进一步验证程序的正确性,完整性与可靠性。通过一步步的联机调试,一点点的修改,使控制功能不断的完善,最终达到了比较理想的控制结果,和实验的要求基本吻合。
程序的基本控制过程如下:通过PRV指令读高速计数器的当前值,用CMP指令使高速计数器的当前值和1000进行比较,当高速计数器的当前值等于1000时,高数计数器复位,接通3秒定时器,即换瓶机运行3秒,完成换瓶控制,与此同时,用INC指令使数码管的当前值加一,显示1到9。等十次换瓶动作完成后,接通5秒定时器,即装箱机运行5秒,完成装箱控制。判断十次换瓶动作是否完成是通过计数器指令实现的。最后高数计数器复位,开始下一周期的循环。
1.10上位机监控界面
(二)基于PL C的自动刀具库管理控制系统的设计。
2.1控制要求:
圆盘模拟数控加工中心的刀具库,刀具库上共装有8把刀具,编号为:0~7,光电传感器可以检测刀具。可以通过拨码开关输入设置所要选取的刀具的编号,当设置完毕后,按下启动按钮,系统会首先判断所选刀具与现有刀具的相对位置,然后决定刀具库(圆盘)反转还是正转,使所选刀具以最短行程到达工作位置(光电传感器处)。数码管显示工作位置(光电传感器处)上刀具的编号。注:系统上电初次启动时,0号刀具在工作位置上;如不在,设置一个手动调节按钮。
2.2设计思路
拨码开关输入的数值作为所要选取的刀具号,通过拨码开关每次输入的BCD码的数值,系统平判断圆盘该正传还是反转,每次转几格,并通过数码管进行实时显示。每次加一格还是减一格是通过圆盘上的光电传感器来进行判断的。
8种刀具,一半是4,若(码盘)设定值与出口处当前位置值之差≥4时正转(顺时针),<4时反转(逆时针)。例如:若设定值为6,当前值为1,6-1=5>4,正转;若设定值为7,当前值为5,7-5=2<4,反转;若设定值为0,当前值为3,0-3=﹣3;结果为负数时,则用:(模)8-3=5>4,正转。
2.3功能流程图
2.4 I/O分配:
2.5元件明细表
在此系统中,所用到的元件为:

2.6硬件接线图
2.7控制梯形图
PLC的程序设计环境:
PLC的编程主要是通过编程器或用PLC生产厂家提供的编程软件来完成的。每个PLC公司都有自己的编程器,一般比较小,而且比较轻,适合在现场使用。但是这种编程器只能使用助记符语言对PLC进行编程,而且由于屏幕较小,每次只能显示一、两行程序,难于对程序从整体上分析。PLC公司提供的编程软件则能使用梯形图、助记符或功能图语言等进行编程。通过编程软件,不仅能从宏观上对程序进行编辑和分析,而且还能对程序的运行情况进行监视。
进入CX-Programmer初始界面后,在【文件】下拉菜单中,单击“新建”菜单项,选择创建一个新文件。在【设备名称】中填写设备名称,设备类型选择PLC的类型,然后单击设定按钮选择CPU的类型,单击确定后,即可进入梯形图编程界面,开始编程。程序编写完成后,下一步就可进行编译、链接和调试了。如果编译没有错误,就可以进行在线运行。在编译过程中,如果出现错误要进行修改时,我们既可以在梯形图编程下修改,也可在助记符方式下修改。编译完成,没有语法错误,可加载程序到PLC,进行在线运行。
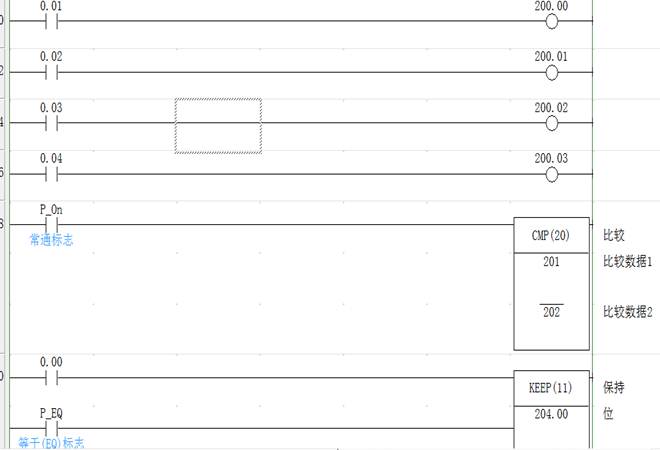


2.8 指令表:
LD 0.01
OUT 200.00
LD 0.02
OUT 200.01
LD 0.03
OUT 200.02
LD 0.04
OUT 200.03
LD P_On
CMP(20) 201
202
LD 0.00
LD P_EQ
KEEP(11) 204.00
LD 0.00
BCD(24) 200 201
LD 204.00
OUT TR0
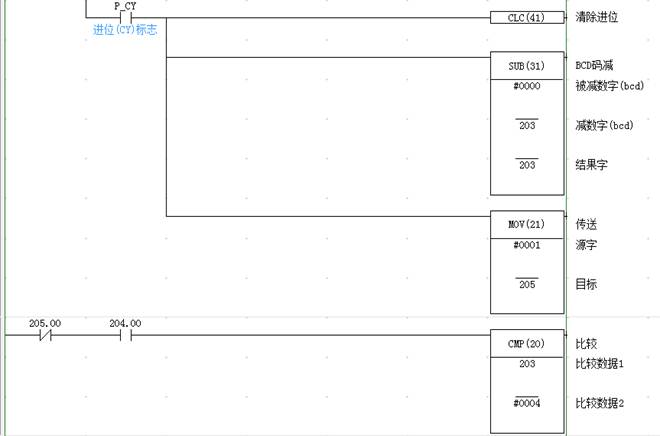
CLC(41)
SUB(31) 202
201
203
ANDNOT P_CY
MOV(21) #0000
205
LD TR0
AND P_CY
CLC(41)
SUB(31) #0000
203
203
MOV(21) #0001
205
LDNOT 205.00
AND 204.00
CMP(20) 203
#0004
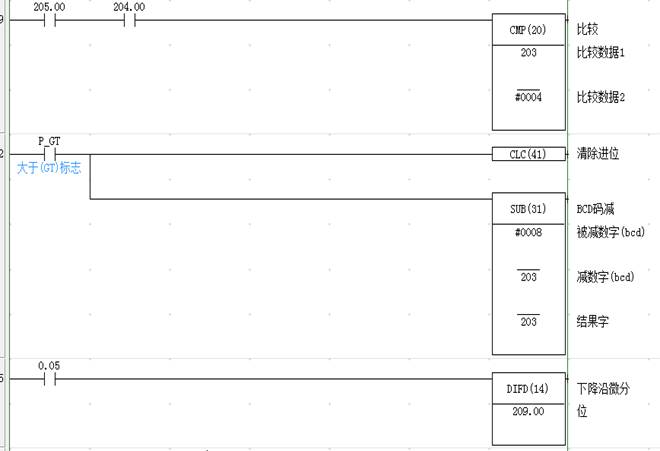
LD 205.00
AND 204.00
CMP(20) 203
#0004
LD P_GT
CLC(41)
SUB(31) #0008
203
203
LD 0.05
DIFD(14) 209.00
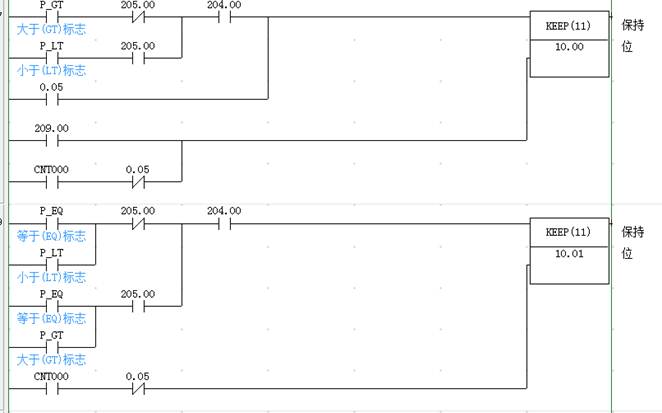
LD P_GT
ANDNOT 205.00
LD P_LT
AND 205.00
ORLD
AND 204.00
OR 0.05
LD 209.00
LD CNT000
ANDNOT 0.05
ORLD
KEEP(11) 10.00
LD P_EQ
OR P_LT
ANDNOT 205.00
LD P_EQ
OR P_GT
AND 205.00
ORLD
AND 204.00
LD CNT000
ANDNOT 0.05
KEEP(11) 10.01
LD 0.08
LD 0.00
CNT 000
203
LD CNT000
MOV(21) 201
202
LD 0.08
DIFU(13) 206.00
LD 206.00
AND 10.00
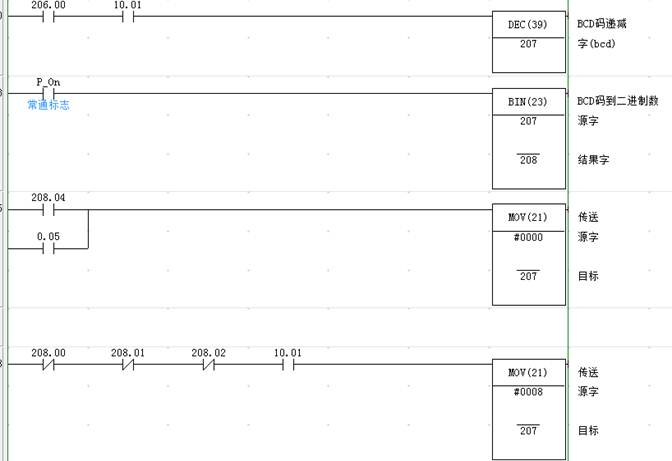
INC(38) 207
LD 206.00
AND 10.01
DEC(39) 207
LD P_On
BIN(23) 207
208
LD 208.04
OR 0.05
MOV(21) #0000
207
LDNOT 208.00
ANDNOT 208.01
ANDNOT 208.02
AND 10.01
MOV(21) #0008
207
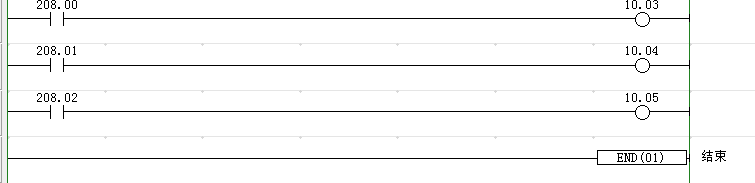
LD 208.00
OUT 10.03
LD 208.01
OUT 10.04
LD 208.02
OUT 10.05
END(01)
2.9 设计结果与分析:
2.10上位机监控界面
四.设计的心得与体会
PLC应用技术是一门实践性很强的专业课,可PLC编程控制器技术在当今社会发展异常迅速,各生产厂家也推出了许多强大的新型PLC、各种特殊模块和通信联网器件,使可编程控制器成为集微机技术、自动化技术、通信技术于一体的通用工业控制装置,成为实现工业自动化的一种强有力的工具。经过这次设计我学到很多很多的的东西,不仅巩固了以前所学过的知识,而且学到了很多在书本上所没有学到过的知识。而且通过这次课程设计使我懂得了理论与实际相结合是很重要的,只有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,才能真正的学到知识,从而提高自己的实际动手能力和独立思考的能力。
此外,通过这次设计实践。我学会了PLC的基本编程方法,对PLC的工作原理和使用方法也有了更深刻的理解。在对理论的运用中,提高了我们的工程素质,在没有做实践设计以前,我们对知道的撑握都是思想上的,对一些细节不加重视,当我们把自己想出来的程序与到PLC中的时候,问题出现了,不是不能运行,就是运行的结果和要求的结果不相符合。能过解决一个个在调试中出现的问题,我们对PLC 的理解得到加强,看到了实践与理论的差距。
通过合作,我们的合作意识得到加强。合作能力得到提高。上大学后,很多同学都没有过深入的交流,在设计的过程中,我们用了分工与合作的方式,每个人互责一定的部分,同时在一定的阶段共同讨论,以解决分工中个人不能解决的问题,在交流中大家积极发言,和提出意见,同时我们还向别的同学请教。在此过程中,每个人都想自己的方案得到实现,积极向同学说明自己的想法。能过比较选出最好的方案。在这过程也提高了我们的表过能力。
通过此次课设,让我了解了plc梯形图、指令表、顺序功能图有了更好的了解,也让我了解了关于PLC设计原理。有很多设计理念来源于实际,从中找出最适合的设计方法。
虽然本次课程设计是要求自己独立完成,但是,彼此还是脱离不了集体的力量,遇到问题和同学互相讨论交流。多和同学讨论。我们在做课程设计的过程中要不停的讨论问题,这样,我们可以尽可能的统一思想,这样就不会使自己在做的过程中没有方向,并且这样也是为了方便最后设计和在一起。讨论不仅是一些思想的问题,还可以深入的讨论一些技术上的问题,这样可以使自己的处理问题要快一些,少走弯路。多改变自己设计的方法,在设计的过程中最好要不停的改善自己解决问题的方法,这样可以方便自己解决问题
在设计的过程中我们还得到了老师的帮助与意见。在学习的过程中,不是每一个问题都能自己解决,向老师请教或向同学讨论是一个很好的方法,不是有句话叫做思而不学者殆。做事要学思结合。
五:参考文献
1、《可编程序控制器原理及应用》宫淑贞 主编 人民邮电出版社
2、《CPM1A系列编程手册》 OMRON