
(20##届)
本科生毕业设计(论文)资料
湖南工业大学教务处
二○##年九月制
目 录
第一部分 过程管理资料
一、毕业设计(论文)课题任务书····································· 3
二、本科毕业设计(论文)开题报告·································· 5
三、本科毕业设计(论文)进展情况记录··························· 9
四、本科毕业设计(论文)中期报告································ 11
五、毕业设计(论文)指导教师评阅表····························· 12
六、毕业设计(论文)评阅教师评阅表····························· 13
七、毕业设计(论文)答辩及最终成绩评定表··················· 14
第二部分 设计说明书
八、设计说明书····························································· 15
20##届
本科生毕业设计(论文)资料
第一部分 过程管理资料
2007届毕业设计(论文)课题任务书
院(系):机械工程学院 专业:机械设计制造及其自动化

湖南工业大学
本科毕业设计(论文)开题报告
(20##届)

20##年3月12日

说明:开题报告作为毕业设计(论文)答辩委员会对学生答辩资格审查的依据材料之一,此报告应在导师指导下,由学生填写,将作为毕业设计(论文)成绩考查的重要依据,经导师审查后签署意见生效。
本科毕业设计(论文)进展情况记录
毕业设计(论文)题目:带槽三角形固定板冲圆孔、冲槽、落料连续模设计
班级: 机本0302 学号:26030203 学生: 宋璐 指导教师: 曾立平
注:教师监督学生如实记录毕业设计(论文)过程中根据《课题任务书》拟定的进度与进展情况以及毕业设计(论文)撰写过程中遇到的问题和困难,并签署意见。

注:教师监督学生如实记录毕业设计(论文)过程中根据《课题任务书》拟定的进度与进展情况以及毕业设计(论文)撰写过程中遇到的问题和困难,并签署意见。
本科毕业设计(论文)中期报告
填表日期:20##年5月 16日

毕业设计(论文)指导教师评阅表
院(系):机械工程学院

毕业设计(论文)评阅教师评阅表
院、系:机械工程学院
毕业设计(论文)答辩及最终成绩评定表
院、系(公章):

说明:最终评定成绩=a+b+c,三个成绩的百分比由各院、系自己确定。
20##届
本科生毕业设计(论文)资料
第二部分 设计说明书
第二篇:毕设任务书、开题报告、文献综述
浙江工商大学
本科毕业设计(论文)任务书
学 院 信息与电子工程学院__ 专 业 电子信息工程__ _ 班 级 电子0701__ _ 学 号 学生姓名 周文华__ __ 指导教师

浙江工商大学
本科毕业设计(论文)开题报告
学 院 专 业 电子信息工程__ __ 班 级 电子0701__ _ 学 号 学生姓名 周文华__ __ 指导教师
1
2
3
4
5
6
7
8
.
9 Ⅱ文献综述
补库所法设计死锁预防控制器综述
摘 要: 作为Petri网的一个结构体,信标在柔性制造系统(FMS)的
死锁预防策略的发展中扮演者十分重要的角色,许多死锁预防策略都是基于信标
来提出的。所以求信标的算法成为了Petri网的一个热点。
对于一类Petri网系统S3PR,补库所监督器可以保证系统的活性,本文提出
了此类监督器存在的充分条件。严格极小信标分为基本信标和从属信标,对每个
基本信标通过添加控制库所,保证其能够被标识,同时不产生新的可被清空的信
标.从属信标的控制通过调整基本信标的控制深度变量来实现。通过添加控制库
所,得到了许可状态更多、结构更为简单的Petri网控制器。还提出了一种基于
基本信标和补库所的算法。
关键词:Petri网;基本信标;死锁预防;资源环,补充库所,S3PR 10
The Synthesis of Deadlock Prevention Policy for S3PR
based on Complementary Places and Elementary Siphons
Abstract:As a structural object of Petri nets, siphons play an important role in the development of deadlock prevention policies for flexible manufacturing systems (FMS), many deadlock prevention policies are proposed based on siphons. Therefore the method of computing siphons is becoming a hotpot in the study of the Petri nets.
For a class of Petri nets called Systems of Simple Sequential Processes with Resources (S3PR), this paper proposes a sufficient condition under which there exists a complementary-place supervisor to enforce their liveness. Strictminimal siphons are divided into elementary and dependent ones. For each elementary siphon, a monitor is added to ensure that it is sufficiently marked without gnerating emptiable control-induced siphons. The controllability of a dependent siphon is guaranteed by changing the control depth variables of its related elementary siphons, which leads to a liveness-enforcing supervisor for a plant mode. Furthermore, by adding control-monitors, amore permissive and structurally simple net supervisor will be available.Moreover, an algorithm is proposed to design liveness-enforcing supervisors based on complementary places and elementary siphons.
Keywords: Petri nets, Elementary siphon, Deadlock prevention, Loop resource,Complementary-place,S3PR
文献综述正文
一、Petri网与S3PR网
19xx年,C.A.Petri提出了Petri网的理论。Petri网作为一种数学方法,在离散事件系统建模、分析、性能评价和控制设计中得到了广泛地应用。作为一种控制系统的设计手段,从上世纪70年代开始,Petri网以其能够模拟系统的并发和冲突行为以及反映系统的动态特性而受到广泛地关注。Petri网由此得到了快速的发展。
S3PR是一种普通Petri网,其特点是每一个工序只需要一种资源的参与,一个资源不能连续参与两个工序的加工。19xx年,Tricas等提出了ES3PR中严格极小信标和系统思索的关系,指出了存在严格极小信标是系统具有可能死锁的必要条件,通过添加控制库所打破这种必要条件,相应的位置设计了活性Petri网控制器。而控制器的计算需要求解Petri网模型中所有严格极小信标。
二、死锁
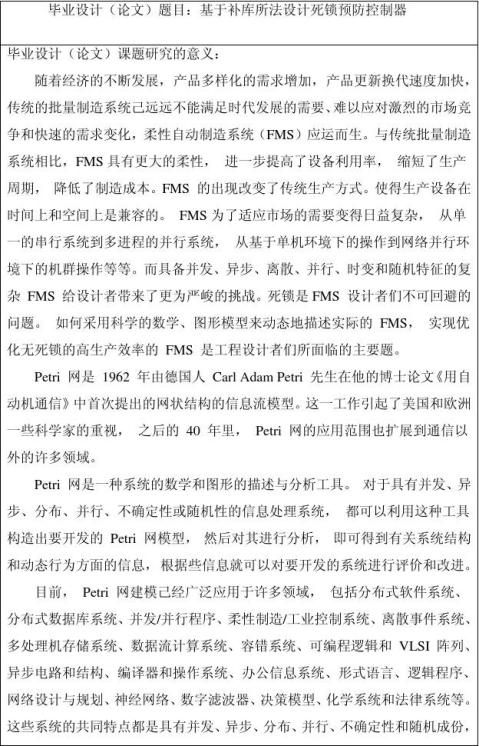
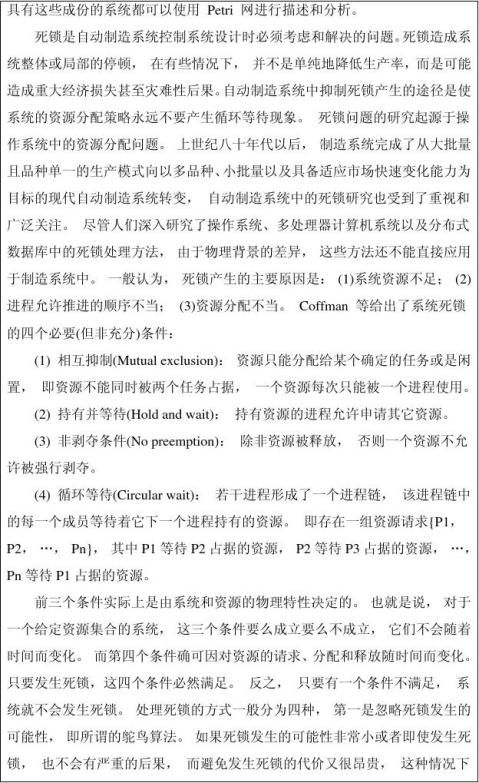
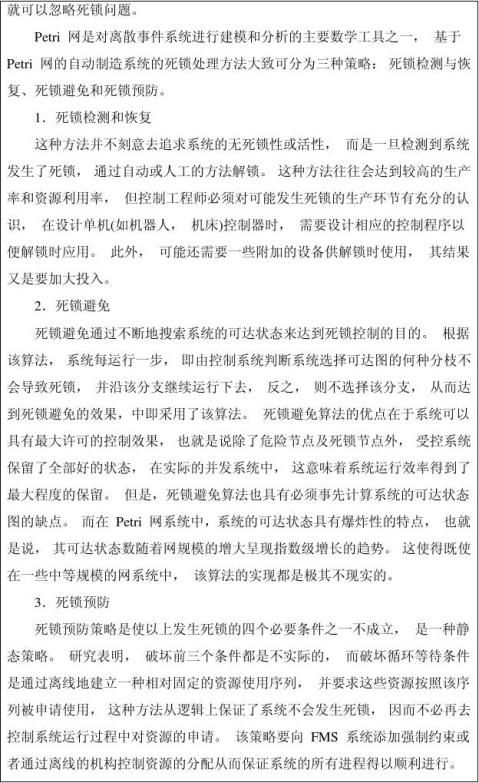
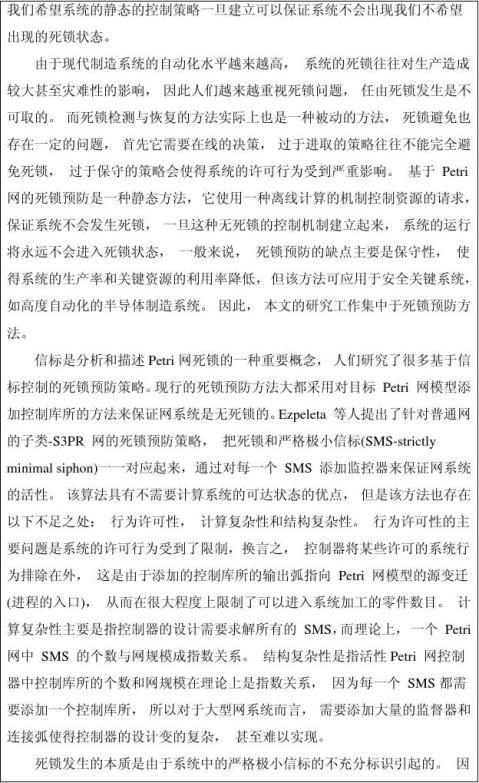
随着信息技术在生产系统中的广泛应用,生产过程中的安全性、可靠性以及其他日益繁多、错综复杂的要求也相应的要由控制系统的软件来实现和满足。现代自动自造系统日益成为软件密集型系统,针对它们的建立和维护来说,系统控制如今的设计是一项异常艰巨和复杂的软任务。系统的死锁问题是自动制造系统控制器设计时必须考虑和解决的问题,这一点在高度自动化生产系统中至关重要。死锁问题的研究始于操作系统中的资源分配问题[1]。一般认为,死锁产生的主要原因有:1)系统资源不足;2)进程允许推进的顺序不当;3)资源分配不合理。Coffman等人给出了系统死锁的四个必要条件:1)相互抑制;2)持有并等待;
3)非剥夺条件;4)循环等待。只要发生死锁,这四个条件必然都满足。反之,只要一个条件不满足,系统就不会发生死锁。处理死锁的方法一般分为四种。第一种是忽略死锁,如果死锁发生的可能性很低,或者即使死锁发生也不会有严重的后果,而死锁预防的费用很高,这种情况下可以忽略死锁。第二种是死锁的检测与恢复,一检测到死锁就采取相应措施恢复。第三种是死锁避免,对系统进行实时监控,消除能引起死锁的状态。第四种就是死锁的预防,使死锁发生的四个条件在任何情况下都不能同时存在。
三、信标
简单地说,一个库所集,一旦它失去了所有的托肯,它将永远保持无托肯状态,那么这个库所集就是信标。如果一个信标没有了托肯,一些变迁将永久失去发生权。
死锁发生的本质是由于系统中的严格极小信标的不充分标识引起的. 因此能否通过显式地控制一部分信标从而达到隐式控制其它信标的目的, 从而获得一个无死锁的或者活的Petri网显得特别重要. 因此, Petri网基本信标的概念应运而生. 从理论上讲, 基本信标能够降低活性Petri网控制器的结构复杂性.基本信标是一类特殊的结构对象, 它们是通过观察信标中托肯数的变化和其它信标托肯数变化的关系而产生的. 显然, 一个从属信标能通过正确配置它基本信标的托肯数来保证其可控性. 基本信标理论在死锁预防策略中起了重要作用, 运用该理论可以获得结构简单的活性Petri网控制器.
四、国内外研究成果
一个Petri网的无死锁和活性性质与其信标密切相关。基于此,许多研究人员对信标进行了研究[10],[11],[12],发现信标在柔性制造系统(FMS)的死锁预防上起到了非常重要的作用[13], [14],[15]。
Ezpeleta [5]研究了一种叫资源的简单顺序进程系统(S3PR)的信标与死锁之间的关系。他根据Petri网的信标结构给出了该网络的活性性质,并提出了如何通过增加控制器实现增强网络活性和防止严格极小信标被清空的方法。他们的工作的意义在于一个工厂及其监控器成功地分离,所以控制器的控制实现技术能够独立地发展。但是这种方法会遇到一些类似计算复杂、行为随意和结构复杂等问题。几乎所有给严格极小信标增加控制器策略的死锁预防策略在加控制器后又专注于解决上述的问题[8],[9]。他们的方法的缺点主要在于于严格极小信标的计算复杂,系统允许行为减少,系统结构复杂[16].
Yamalidou [17]等提出了一种基于P-不变式的方法来计算检测器 ,大大将降低了计算的复杂度,因此被许多研究死锁预防的科研工作者采用[18] [19] [20]. 然而,基于此方法,系统的允许行为仍然有待提高。Huang 等 利用混合整数规划,提出了一种预防死锁的迭代算法[20]。为保证原系统模型的信标不被清空,他们采用了两种控制库所:一般控制库所和加权控制库所。这样,大大降低了计
算复杂度,却限制了系统的允许行为。Li和Zhou[7]将Petri网的信标归类为两类:基本信标和从属信标。通过标识一个S3PR网的基本信标的不变量控制,他们证明在一定的条件下仅仅通过控制基本信标就能获得一个活性监控器,这样避免了多余的监控器。因此有效地提高了计算效率。基于基本信标的死锁预防策略计算复杂度主要在于基本信标的计算。由此,许多研究者已经研究许多计算基本信标的方法,并获得了显著进步。
Li和Zhou是用资源环计算严格极小信标的先驱。在他们的方法里,对于网中每一个资源环都计算其相关联的严格极小信标。通过充分利用一个Petri网的结构信息,Li和Zhou[9]提出了一个在S3PR基于资源环的基本信标的计算方法。他们说任何从属信标能够通过从资源环得到的基本信标的组合来找到。与他们之前的文章[8]对比,在文章[9]介绍的方法避免了完全枚举严格极小信标,因此提高了计算效率。然而,一些严格极小信标的计算结果是错的。
根据区域理论,Uzam [21]提出了一种可选择的增强系统活性的监测器综合设计法。对于大型Petri网模型, Uzam and Zhou [22] [23]运用网模型简化的方法减少计算量、优化基于不变式的控制算法 。 Uzam [24]为降低FMS的复杂度,提出了一种增强系统活性的监测器冗余测试。Li [25],运用信标控制法以及区域理论来解决死锁问题。此法极大减少了计算的复杂度,但是同样面临着结构过于复杂的难题。
在文献[4],Chu和Xie提出了一个基于混合整数规划(MIP)的死锁检测方法。对于一个网给定的标识(marking),用他们的方法能够找出最大无标识信标。其计算有效性与初始标识关系不大,所以被认为比经典状态枚举方法有效。基于文献[4]的结果,Huang[6]提出了一个提取严格极小信标的算法,成功避免了列举所有的信标。他们的方法的缺点就是在计算前先计算最大无标识信标,所以他们的方法的有效性有待提高。
本毕业设计用资源环子集去计算所有的严格极小信标。首先求出其资源环,再求出除去有特殊变迁的资源环,再用剩下的资源环求信标,计算出所有严格极小信标集合,进一步根据相关定义确定一组基本信标,进而求出操作库所并为其添加补充库所,为保证活性,要求判断并求解相关信标的容量限制。
文献综述参考文献
[1] 李志武、周孟初. 自动制造系统建模、分析与死锁控制.[M].北京.科学出版社.2009.
[2] 吴哲辉.Petri网导论.[M].北京.机械工业出版社.2006.
[3] 王安荣(2003). 柔性制造系统死锁分析与控制.[D].西安电子科技大学.
[4] F.Chu,X.L.Xie,“Deadlock analysis of Petri nets using siphons and mathematical
programming,”IEEE Trans. Robot. Autom.,1997,13(6):793-804.
[5] J.Ezpeleta,J.M.Colom,and J.Martinez,“A Petri net based deadlock prevention policy for
flexible manufacturing systems,”IEEE Trans Robot. Autom., vol.11,no.2,pp.173-184,Apr.1995.
[6] Yisheng Huang,MuDer Jeng,Xiaolan Xie, and Shengluen Chung,“Deadlock prevention policy
based on Petri nets and siphons,”International Journal of Production Research,2001,39(2):283-305.
[7] Z.W.Li, and M.C.Zhou,“Elementary siphons of Petri nets and their application to deadlock
prevention in flexible manufacturing systems,”IEEE Trans.Syst.,Man,Cybern.,A,Syst.,Humans.vol.34,no.1,pp.38-51,Jan.2004.
[8] Z.W.Li,M.C.Zhou, and M.D.Jeng,“A maximally permissive deadlock prevention policy for
FMS based on Petri net siphon control and the theory of regions,”IEEE Trans.Autom.Sci.Eng.,vol.5,no.1,pp.182-188,Jan.2008.
[9] Z.W.Li and M.C.Zhou, “On siphon computation for deadlock control in a class of Petri nets,”
IEEE Trans.Syst.,Man,Cybern.,A,Syst.,Humans,vol.38, no.,pp.667-679,Jun.2008.
[10]Z. W. Li and M. C. Zhou. On siphon computation for deadlock control in a class
of Petri nets. IEEE Trans. Syst., Man, Cybern., A, Syst., Humans, 38(3), 667-679.
[11]R. Cordone, L. Ferrarini, and L. Piroddi (2005). Enumeration algorithms for
minimal siphons in Petri nets based on place constraints. IEEE Trans. Syst.,Man, Cybern., A, Syst., Humans, 35(6), 844-854.
[12]A. R. Wang, Z. W. Li, J. Y. Jia, and M. C. Zhou (2009). An effective algorithm
to find elementary siphons in a class of Petri nets. IEEE Trans. Syst.,Man, Cybern., A, Syst., Humans, 39(4), 912-923.
[13]L. Piroddi, R. Cordone, and I. Fumagalli (2008). Selective siphon control for
deadlock prevention in Petri nets. IEEE Trans. Syst.,Man, Cybern., A, Syst., Humans, 38(6), 1337-1348.
[14]Y. S. Huang, M. D. Jeng, X. L. Xie, and S. L. Chung (2001). Deadlock prevention
policy based on Petri nets and siphons. Int. J. Prod. Res., 39, 283–305.
[15]Z. W. Li and M. Zhao (2008). On controllability of dependent siphons for deadlock
prevention in generalized Petri nets. IEEE Trans. Syst.,Man, Cybern., A, Syst., Humans, 38(2), 369-384.
[16]Z. W. Li and M. C. Zhou (2004). Elementary siphons of Petrinets and their
application to deadlock prevention in flexible manufacturing systems. IEEE Trans. Syst.,Man, Cybern., A,Syst., Humans, 34(1), 38-51.
[17]K.Yamalidou, J. Moody, M. Lemmon, and P.Antsaklis (1996). Feedback control of
petri nets based on place invariants. Automatica, 32, 15–28.
[18]Z. W. Li, M. C. Zhou, and M.Uzam (2007). Deadlock control policy for a class
of petri nets without complete siphon enumeration. IET Control Theory Appl., 1(6), 1594-1605.
[19]Z. W. Li, M. C. Zhou, and M. D. Jeng (2008). A maximally permissive deadlock
prevention policy for FMS based on Petri net siphon control and the theory of regions. IEEE Trans. Autom. Sci. Eng., 5(1), 182-188.
[20]Y. S. Huang, M. D. Jeng, X. L. Xie, and D. H. Chung (2006). Siphon-based deadlock
prevention policy for flexible manufacturing systems. IEEE Trans. Syst., Man, Cybern., A, Syst., Humans, 36(6), 1248–1256.
[21]M. Uzam (2002). An optimal deadlock prevention policy for flexible manufacturing
systems using Petri net models withresources and the theory of regions. Int. J. Adv. Manuf.Technol., 19, 192–208.
[22]M. Uzam (2004). The use of Petri net reduction approach for an optimal deadlock
prevention policy for flexible manufacturing systems. International Journal of Advanced Manufacturing Technology, 23(3-4), 204-219.
[23]M. Uzam and M. C. Zhou (2006). An improved iterative synthesis method for
liveness enforcing supervisors of flexible manufacturing systems. International Journal of Production Research, 44(10), 1987-2030.
[24]M. Uzam, Z. W. Li, and M. C. Zhou (2007). Identification and elimination of
redundant control places in Petri net based liveness enforcing supervisors of FMS. International Journal of Advanced Manufacturing Technology, 35(1-2), 150-168.
[25]Z. W. Li, M. C. Zhou, and M. D. Jeng (2008). A maximally permissive deadlock
prevention policy for FMS based on Petri net siphon control and the theory of regions. IEEE Trans. Autom. Sci. Eng., 5(1), 182-188.