四川理工学院毕业设计(论文)开题报告

设计(论文)类型:A—理论研究;B—应用研究;C—软件设计;D-其它等。
第二篇:行星齿轮 减速器
一、 2K-H(NGW)型行星齿轮减速器的优化设计

图1.1 2K-H型行星轮系机构简图
1- 中心轮 2-行星轮 3-壳体
图1.1 为2K-H型行星轮系机构简图。已知:作用于中心轮的转矩T1=1140N·m,传动比u=4.64,齿轮材料均为38SiMnMo,表面淬火45—55HRC,行星轮个数c=3,要求以重量最轻为目标,对其进行优化设计。
1、目标函数和设计变量的确定
行星齿轮减速器的重量可取太阳轮和c个行星轮重量之和来代替,因此目标函数可简化为:

式中: — 中心轮1的齿数;
— 中心轮1的齿数;
m — 模数,单位为(mm);
b — 齿宽,单位为(mm);
c — 行星轮2的个数;
u — 轮系的传动比。
影响目标函数的独立参数应列为设计变量,即

在通常情况下,行星轮个数可以根据机构类型事先选定,这样,设计变量为:

目标函数为:

2.约束条件的建立
1)小齿轮不根切,得:
2)限制齿宽最小值,得:
3)限制模数最小值,得:
4)限制齿宽系数b/m的范围: ,得:
,得:
5)满足接触强度要求,得:

式中: —许用接触应力。
—许用接触应力。
6)满足弯曲强度要求,得:

式中: 、
、 —齿轮的齿形系数和应力校正系数;
—齿轮的齿形系数和应力校正系数;
 —许用弯曲应力。
—许用弯曲应力。
二、螺栓组联接的优化设计
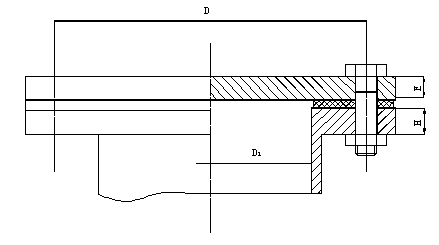
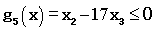
图2.1
如图2.1所示压力容器,已知:内部气体压强p=12N/mm2,容器内径D1=500mm,螺栓中心圆直径D=640mm,E=H=20mm,用衬垫密封。试解出该螺栓组联接的最佳方案。
1.目标函数和设计变量
在大批量生产压力容器时,以螺栓总成本最小作为追求的设计目标很有意义,一台压力容器的螺栓总成本Wn取决于螺栓的个数n和单价W,即
Wn=nW
经市场调查,螺栓单价W与其直径d、长度、材料及加工状况有关。当螺栓材料、长度和加工长度一定时,螺栓单价可看作其直径的线性函数
W=c1d-c2
图2.2
例如,现选择一常用的35号钢,长为50mm的六角头半精制螺栓,其单价如图2.2所示,用线性回归法可得方程
W=0.0205d-0.1518
于是,可对这种螺栓组写出如下目标函数
f(x)=n(0.0205d-0.1518)
显然,可取设计变量为
X=[x1,x2]T=[d,n]T
则目标函数
f(x)= x2 (0.0205 x1-0.1518)
2.约束函数
设计压力容器螺栓组时,螺栓数量的确定既要考虑密封性要求,又要兼顾装拆工具的工作空间。而螺栓直径应保证必要的强度,又要使容器凸绦外径尺寸D0不致过大(图1)。综合考虑这些要求,可确立下列约束函数:
1)紧密性条件 为保证螺栓间的密封压力均匀,且防止局部漏气,据经验,螺栓间的周向距离不应大于10d,即
πD/n≤10d
由此得约束函数
g1(x)=10 x1-πD/ x2≥0
2) 扳手工作空间的限制 为保证装拆螺栓联接的工艺性,应有足够的扳手回转空间,即螺检栓间的间隔不应小于5d,即
πD/n≥5d
则约束函数
g2(x)= πD/ x2-5 x1≥0
3)强度条件 由机械零件设计手册,可查出类似材料的螺栓在不同直径时无预先锁紧工况的螺栓许用载荷,利用这些资料,用回归分析法可求得许用载荷的指数回归方程
[F]=7.06302d2.11354
为保证压力容器在额定压强P下安全工作,螺栓总许用载荷n[F]应至少等于容器盖所受总压力,即
n[F]-α ≥0
≥0
式中 α=1.1 - 安全余量系数
因而约束函数
g3(x)= 7.06302 x2 x12.11354-0.86394p ≥0
≥0
三、普通圆柱螺旋弹簧的优化设计
试优化设计一气门类压簧,材料为50CrVA钢 丝,工作载荷F=680N,最大变形λ=16.59mm, 工作频率fr=25Hz,循环工作次数N=106。结构上要求:2.5≤d≤9.5 mm,30 mm≤D2≤60 mm,n≥3,C≥6,P0=47N/mm。查得[τ]=405 N/mm2,刚度相对误差δ取0.01。按重量最轻优化.
1.目标函数和设计变量
普通螺旋圆柱弹簧包括拉簧、压簧和扭簧。在优化设计时,可以重量最轻、体积最小、高度最小等分别作为追求目标建立单目标函数,也可以组成多目标函数。
1)重量最轻
式中: -弹簧材料的比重;
-弹簧材料的比重;
 —压簧支承圈数;
—压簧支承圈数;
D2 ——弹簧中径;
 —簧丝直径;
—簧丝直径;
n —工作圈数。
2)体积最小

3) 高度最小
由上述3式知,目标函数是d、 和n的函数,因此,可取设计变量
和n的函数,因此,可取设计变量
X=[x1,x2,x3]T=[d,,n]T
为简化计算,略去某些常数部分,可将上述3式改写为:


2.约束函数
1)弹簧旋绕比C=3~6=/d,约束函数为

2)弹簧刚度约束 要求弹簧设计刚度与要求刚度P0的相对误差小于给定值δ

约束函数为
式中:G—弹簧材料的剪切弹性模量
3)强度条件 压簧的扭转剪应力τ不得超出许用应力[τ]

式中:F2—压簧的最大工作载荷;
K—曲度系数,当载荷作用次数在103以下时,K=1+0.5/C,否则,取k=1.6/(D2/d)0.14。
约束函数为
4)稳定性条件 在无导杆或导套的情况下,为保证压簧在F2作用下不失稳,应满足
H0/D2≤bm=2.62/μ0
式中:H0—压簧自由高度
H0=(n+n0-0.5)d+1.1λ
式中: λ — 弹簧的最大变形量,λ=F2/P0,P0=(F2-F1)/h
H — 弹簧工作行程
μ0— 弹簧端部系数,两端固定μ0=0.5,一端固定一端回转μ0=0.7,两端回转μ0=1
约束函数为
g4(x)=2.62/μ0-H0/x2
5)无共振条件 为防止共振,对于气门类弹簧,应使其自振频率f远大于其工作频率fr,一般f≥10fr;而对于减振弹簧则相反,取f≤0.5 fr。自振频率

因此,约束函数为
或

6)最小二作圈数nmin限制 即n≥nmin,约束函数为

7)其他界限约束 如中径在许用范围内,则有
弹簧直径在允许范围内,有

四、轴的优化设计
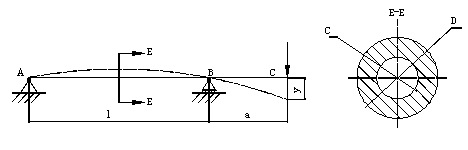
图4.1
如图4.1所示,设主轴外径为D,两支承跨距为 ,伸出端长度为a,主轴的轴端受力P=15000N,内径d=30mm,≥300mm,60mm≤D≤140 mm,a≥90 mm。试按体积最小设计该轴,并使其端部挠度y≤0.005cm。
,伸出端长度为a,主轴的轴端受力P=15000N,内径d=30mm,≥300mm,60mm≤D≤140 mm,a≥90 mm。试按体积最小设计该轴,并使其端部挠度y≤0.005cm。
1.目标函数及设计变量
目标函数为
其中,主轴内径d主要决定于棒料直径,因此可作为常量处理。故目标函数是决定主轴刚度和强度的三个参数D、和a的函数,可取设计变量
X=[x1,x2,x3]T=[, ,a]T
,a]T
这样,目标函数就可写成
2.约束条件
机床加工质量在很大程度上取决于主轴的刚皮。因此,要求主轴伸出端的挠度不超过给定的静变形,即y≤y0。据此,可建立主轴静刚度约束条件
 (1)
(1)
根据材料力学的莫尔积分公式,挠度
式中 M和M0—作用在端点C处的外力P和单位力所引起的弯矩;
L——主轴全长;
E和J——主轴的弹性模量和截面惯性矩。
故
主轴由钢材制造,E=2.1×105kg/cm2,将这些参数和数值
代入式(1),得

此外。三个设计参数、D和a的边界约束条件为
写成设计变量形式,则可得约束函数式如下:
五、曲柄摇杆机构再现己知运动规律的优化设计
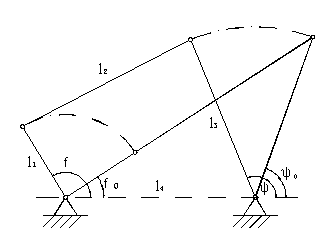
图5.1 曲柄摇杆机构简图
设计一曲柄摇杆机构,如图5.1所示,当曲柄 由其极限角
由其极限角 转至
转至 时,实现摇杆的输出角
时,实现摇杆的输出角 与曲柄转角之间的如下函数关系:
与曲柄转角之间的如下函数关系:
 (1)
(1)
并要求机构的传动角(连杆 与从动件
与从动件 之间的夹角)的最小值和最大值应分别不小于和不大于其许用值,即
之间的夹角)的最小值和最大值应分别不小于和不大于其许用值,即

1设计变量的确定
决定机构尺寸的各杆长度,以及当摇杆按已知运动规律开始运动时,曲柄所处的位置角应列为设计变量,即

由于机构杆长按比例变化时不会改变主、从动件的运动规律,因此常取曲柄为单位长度,即=1,其余杆长则表示为的倍数,若取曲柄的初始位置角为极位角,则及相应的摇杆位置角均为杆长的函数,其关系式为
因此,独立变量只有、、 ,则设计变量为
,则设计变量为

2.目标函数的建立
目标函数可根据已知的运动规律与机构实际运动规律之间的偏差最小为指标来建立,为此,把曲柄在从至的区间分成s等分,从动件输出角也有相应的分点与之对应,分点标号记作为i,以各分点输出角的偏差平方总和作为目标函数,故有
式中: ——期望输出角,它是当曲柄输人角
——期望输出角,它是当曲柄输人角 时由式(1)确定的摇杆输出角。
时由式(1)确定的摇杆输出角。 ;
;
 ——实际输出角,由图5.2可知
——实际输出角,由图5.2可知

式中:
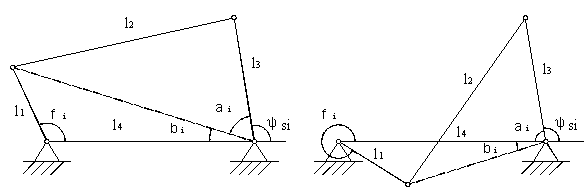

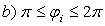
图5.2
3.约束条件的确定
1)按曲柄存在条件建立约束条件

2)曲柄摇杆机构的传动角应在 和
和 之间,可得
之间,可得