武汉工程大学实验报告
专业 建筑节能 班号 一班 组别 指导教师 陈艳菲
姓名 陈尚海 同组者
实验名称 线性系统的时域响应和根轨迹
实验日期 20##- 11-8 第 一 次实验
一、 实验目的
二、 实验内容
三、 实验结果及分析
四、 实验心得与体会
实验一 线性系统时域响应分析
一、实验目的
1.熟练掌握step( )函数和impulse( )函数的使用方法,研究线性系统在单位阶跃、单位脉冲及单位斜坡函数作用下的响应。
2.通过响应曲线观测特征参量 和
和 对二阶系统性能的影响。
对二阶系统性能的影响。
3.熟练掌握系统的稳定性的判断方法。
二、实验内容
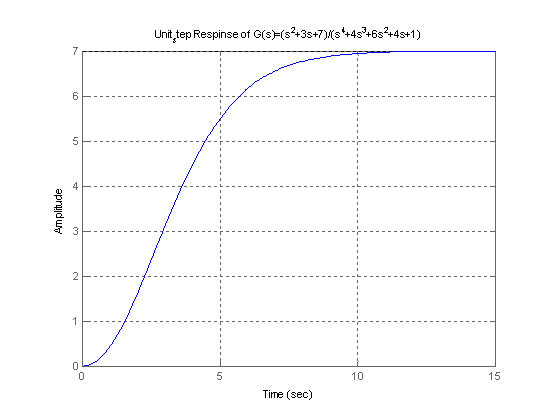
1.观察函数step( )和impulse( )的调用格式,假设系统的传递函数模型为
可以用几种方法绘制出系统的阶跃响应曲线?试分别绘制。
2.对典型二阶系统
1)分别绘出 ,分别取0,0.25,0.5,1.0和2.0时的单位阶跃响应曲线,分析参数对系统的影响,并计算=0.25时的时域性能指标
,分别取0,0.25,0.5,1.0和2.0时的单位阶跃响应曲线,分析参数对系统的影响,并计算=0.25时的时域性能指标 。
。
2)绘制出当=0.25, 分别取1,2,4,6时单位阶跃响应曲线,分析参数对系统的影响。
3.系统的特征方程式为 ,试用两种判稳方式判别该系统的稳定性。
,试用两种判稳方式判别该系统的稳定性。
4.单位负反馈系统的开环模型为
试用劳斯稳定判据判断系统的稳定性,并求出使得闭环系统稳定的K值范围
num=[0 0 1 3 7];
den=[1 4 6 4 1];
step(num,den)
grid
title('Unit_step Respinse of G(s)=(s^2+3s+7)/(s^4+4s^3+6s^2+4s+1)')
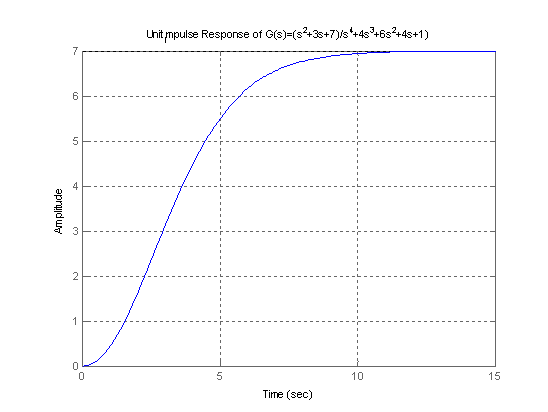
num=[0 0 0 1 3 7];
den=[1 4 6 4 1 0];
impulse(num,den)
grid
title('Unit_impulse Response of G(s)=(s^2+3s+7)/s^4+4s^3+6s^2+4s+1)')
num=[0 0 4];den1=[1 0 4];den2=[1 1 4];
den3=[1 2 4];den4=[1 4 4];den5=[1 8 4];
t=0:0.1:10; step(num,den1,t)
grid
text(1.9,1.7,'Zeta=0'); hold
step(num,den2,t)
text (1.6,1.4,'0.25')
step(num,den3,t)
text (2,1.2,'0.5')
step(num,den4,t)
text (2,0.9,'1.0')
step(num,den5,t)
text (2,0.6,'2.0')
title('Step-Response Curves for G(s)=4/[s^2+4(zeta)s+4]')
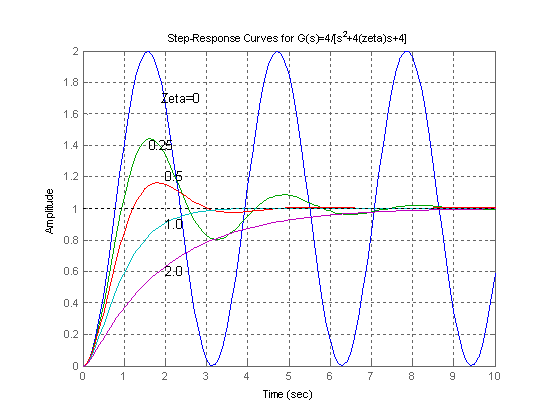
σp=42%, tr=0.95 tp=1.62 ts=6 ess=0
ζ越大,超调量越小,响应的平稳性越好。过阻尼状态下,系统响应迟缓。
num1=[0 0 1]; den1=[1 0.5 1];
t=0:0.1:10; step(num1,den1,t);
grid; hold on
text(3,1.4,'wn=1')
num2=[0 0 4]; den2=[1 1 4];
step(num2,den2,t); hold on
text(1.6,1.4,'wn=2')
num3=[0 0 16]; den3=[1 2 16];
step(num3,den3,t); hold on
text(0.8,1.4,'wn=4')
num4=[0 0 36]; den4=[1 3 36];
step(num4,den4,t); hold on
text(0.5,1.4,'wn=6')
text(0.5,1.4,'wn=6')
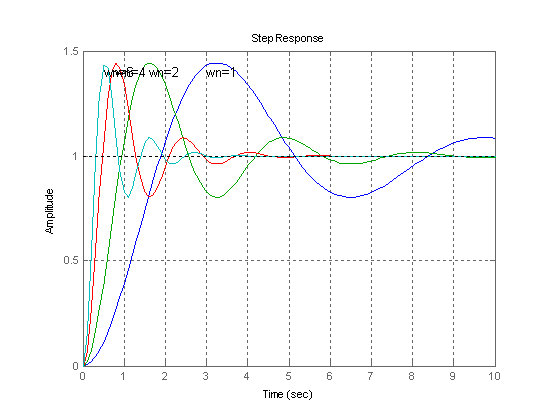
当阻尼比保持不变时,wn越大,调节时间越短,快速性越好。
>> roots([2,1,3,5,10])
ans =
0.7555 + 1.4444i
0.7555 - 1.4444i
-1.0055 + 0.9331i
-1.0055 - 0.9331i
>> den=[2,1,3,5,10];
[r,info]=routh(den)
r =
2.0000 3.0000 10.0000
1.0000 5.0000 0
-7.0000 10.0000 0
6.4286 0 0
10.0000 0 0
info =
所判定系统有 2 个不稳定根!
>> den=[1,12,69,198,210];
[r,info]=routh(den)
r =
1.0000 69.0000 210.0000
12.0000 198.0000 0
52.5000 210.0000 0
150.0000 0 0
210.0000 0 0
info =
所要判定系统稳定!
> den=[1,12,69,198,300];
[r,info]=routh(den)
r =
1.0000 69.0000 300.0000
12.0000 198.0000 0
52.5000 300.0000 0
129.4286 0 0
300.0000 0 0
info =
所要判定系统稳定!
>> den=[1,12,69,198,800];
[r,info]=routh(den)
r =
1.0000 69.0000 800.0000
12.0000 198.0000 0
52.5000 800.0000 0
15.1429 0 0
800.0000 0 0
info =
所要判定系统稳定!
>> den=[1,12,69,198,900];
[r,info]=routh(den)
r =
1.0000 69.0000 900.0000
12.0000 198.0000 0
52.5000 900.0000 0
-7.7143 0 0
900.0000 0 0
info =
所判定系统有 2 个不稳定根!
所以K的取值在800到900之间。
实验二线性系统的根轨迹
一、实验目的
1. 熟悉MATLAB用于控制系统中的一些基本编程语句和格式。
2. 利用MATLAB语句绘制系统的根轨迹。
3. 掌握用根轨迹分析系统性能的图解方法。
4. 掌握系统参数变化对特征根位置的影响。
二、实验内容
1.请绘制下面系统的根轨迹曲线


同时得出在单位阶跃负反馈下使得闭环系统稳定的K值的范围。
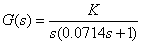
2. 在系统设计工具rltool界面中,通过添加零点和极点方法,试凑出下面系统,并观察增加极、零点对系统的影响。
 ——
—— ——
—— ——
——
G=tf(1,[conv([1,2,2],[1,6,13]),0]);
rlocus (G);
[k,r]=rlocfind(G)
G_c=feedback(G,1);
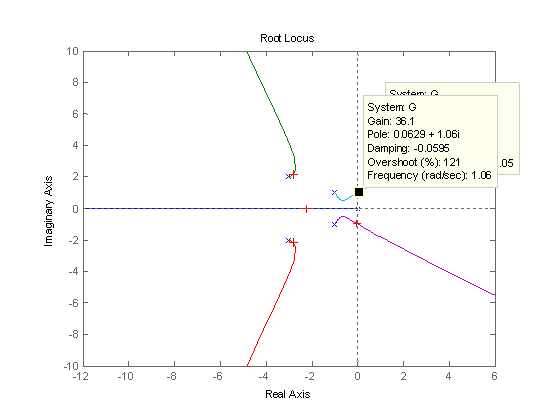
den=[conv([1,1],conv([1,12,100],[1,10]))];
num=[1,12];
G=tf(num,den);
rlocus (G);
[k,r]=rlocfind(G)
G_c=feedback(G,1);
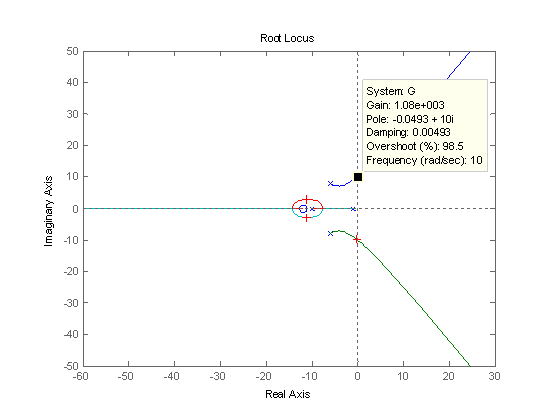
num=[1];
den=[1,0];
G=tf(num,den);
rltool(G)



实验心得与体会
Matlab是一个实用性很强的软件,是一个高级软件,通过我们这次的实验,让我对Matlab有了一定的了解,它是一种科学计算软件,专门以矩阵的形式处理数据。 MATLAB 将高性能的数值计算和可视化集成在一起,并提供了大量的内置函数,从而被广泛地应用于科学计算、控制系统、信息处理等领域的分析、仿真和设计工作,而且利用 MATLAB 产品的开放式结构,可以非常容易地对 MATLAB 的功能进行扩充,从而在不断深化对问题的认识。
用Matlab绘制根轨迹方程,可以得到很精确的图形,我们可以在图上容易读出每个点的数值,从而能很容易的读懂根轨迹。
在以后的学习中要尽可能多的用Matlab,让自己对它有个比较全面的掌握,将它运用与学习的各个领域,让学习变得更简单。
要求:正文用小四宋体,1.5倍行距,图表题用五号宋体,图题位于图下方,表题位于表上方。
第二篇:武汉大学实验报告格式
武汉大学教学实验报告
学院 专业 年 月 日
教务部 制表