飞行程序设计报告
指 导 教 师:戴 福 青
组员:080440109 胡永杰
080440110 纪文国
常规飞行程序设计步骤及作图规范
一、机场相关信息
1.图纸比例尺:1:20万。画出真北磁北(磁差4°W)。
2.跑道数据。

3.无线电导航和着陆设施数据
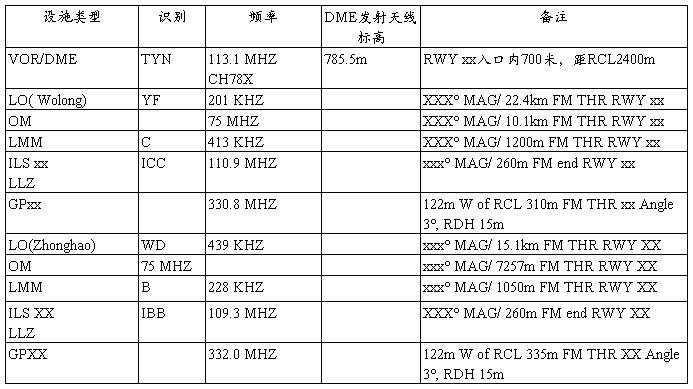
XXX°为大跑道磁方向,xxx°为小跑道磁方向;
XX为大跑道号,xx为小跑道号。
二、扇区划分
1.①以本场归航台“YTN(113.1MHZ CH78X)”为圆心,25NM(46KM)为半径画出主扇区,位于主扇区的边界之外5NM(9KM)为缓冲区。
②以磁北为基准划分0o到90o为Ⅰ区,90o到180o为Ⅱ区,180o到360o为Ⅲ区。扇区外有5KM的缓冲区。
按照下面公式确定扇区最低安全高度(MSA):
MSA=Hob+MOC。主扇区和缓冲区的MOC相同,平原为300米,山区600米。(确定山区还是平原:以机场基准点为中心,以10 NM为半径画圆,找出该范围内最高最低障碍物,若Hmax-Hmin>900m则为山区,若 Hmax-Hmin≤900m则为平原)图中,Hmax-Hmin<900m,所以为平原,MOC=300m
③计算各山区MSA :
Ⅰ区:Hmax=2260m
MSA=1748+15+300=2063m,向上50m取整为2100m
Ⅱ区:Hmax=2023m
MSA=2023+15+300=2348m,向上50m取整为2350m
Ⅲ区:Hmax=1871m
MSA=1871+15+300=2186m,向上50m取整为2200m
2.扇区划分
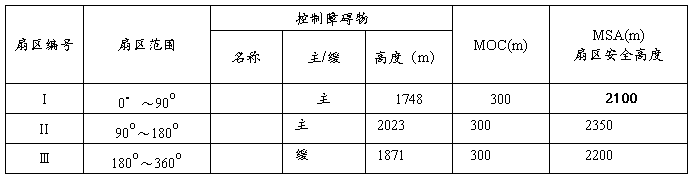
注:1. 高度为海压高,增加15米树高。
2. MSA采用50米向上取整。
三、确定OCHf
1.假定FAF的位置,距离跑道入口距离为 7KM ,定位方式 VOR/DME 。
2.假定IF的位置,定位方式 NDB ,中间航段长度为 11KM 。
3.分别作出最后和中间段的保护区,初算OCH中。
OCH中= Max{HOBi+MOC},HOBi:中间段保护区障碍物高度
假定中间进近航段长度为28km,画出中间进近航段保护区,检查主区及副区内主要障碍物的MOC;
max h =1199,max h
=1199,max h =1199,MOC=150,MOC=[(4650-0)/4650]
=1199,MOC=150,MOC=[(4650-0)/4650] 150=150m
150=150m
OCA中1=MAX{1199+150,1199+150} =1350m
=1350m
OCH中1=600m
XFAF= OCH中1/5.2%=600m/5.2%=8.5KM
4.确定HFAF(HFAF=OCH中),计算最后段的下降梯度,以最佳梯度
5.2%调整FAF、IF的位置。
5.根据调整的结果,重新计算OCHf。
由于近台与FAF都为NDB台,所以都以10.3 向外扩展相交,画出保护区。
向外扩展相交,画出保护区。
检查障碍物,由于最后进近阶段主、副区内无高于机场标高的障碍物,所以h=0
MOC =75m
=75m
OCH =MAX{h+MOC}
=MAX{h+MOC} =75m
=75m
OCA=785+75=860
OCHf= 550m。
[注] OCHf是制定机场运行标准的因素之一,也属于飞行程序设计工作的一方面,有兴趣的同学可以参阅《民航局第98号令》。
四、离场程序
加入TYN 台70度径向线的离场程序
1. 程序介绍:
飞机从11号跑道起飞,保持起飞航向以3.3%的爬升率达到指定高度300米开始转弯,飞机转80度航向然后直飞,推测导航飞行6公里左右直到切TYN台的70度径向线,最终用TYN台做航迹引导加入航路。(飞行参数:转弯半径=7652.3m)
2. 障碍物评估:
障碍物A,高度 784m ,d0= 8.6km ,dR=8.9km , MOC=140 m ,MOA=924m
障碍物B,高度 810m ,d0= 4.4km ,dR=8.9km , MOC= 106.4 m ,MOA=914.6m
障碍物C,高度923m ,d0=6km ,dR= 8.9km ,MOC= 119.2m, MOA=1042.2m
障碍物D,高度 1032m ,d0= 10km ,dR= 8.9km ,MOC= 151.2m , MOA=1183.2m
障碍物E,高度 1005m ,d0= 8.2km ,dR= 8.9km ,MOC=136.8 m, MOA=1141.8m
障碍物F,高度 1115m ,d0= 14.6km ,dR= 8.9km ,MOC=188 m, MOA=1303m
其中d0为转弯点到跑道末端的距离,dR为障碍物到KK线的最短距离。
经分析,飞机以3.3%的爬升率可以超障。
NO.2 加入TYN台210度径向线的离场程序
1. 程序介绍:
飞机从11号跑道起飞,保持起飞航向以3.3%的爬升率达到指定高度300米开始转弯,飞机转170度航向然后沿CH 台的90度方位线做直线飞行,之后飞机切入TYN台的210度径向线保持直飞,最终用TYN台做航迹引导加入航路。(飞行参数:转弯半径=7652.3m)
2. 障碍物评估:
障碍物A,高度 868m ,d0= 4km ,dR=8.9km , MOC=103.2 m ,MOA=971.2m
障碍物B,高度 827m ,d0= 4.1km ,dR=8.9km , MOC= 104 m ,MOA=931m
障碍物C,高度878m ,d0=8.6km ,dR= 8.9km ,MOC= 140m, MOA=1018m
障碍物D,高度 831m ,d0= 10km ,dR= 8.9km ,MOC= 151.2m , MOA=982.2m
障碍物E,高度 830m ,d0= 20km ,dR= 8.9km ,MOC=231.2 m, MOA=1061.2m
障碍物F,高度 799m ,d0= 14.2km ,dR= 8.9km ,MOC=184.8 m, MOA=983.8m
障碍物G,高度 789m ,d0= 13km ,dR= 8.9km ,MOC=175.2 m, MOA=964.2m
其中d0为转弯点到跑道末端的距离,dR为障碍物到KK线的最短距离。
经分析,飞机以3.3%的爬升率可以超障。
NO.3 加入TYN 台280度径向线的离场程序
1.程序介绍:
飞机从11号跑道起飞,保持起飞航向以3.3%的爬升率达到指定高度300米开始转弯,飞机转170度航向然后沿CH 台的90度方位线做直线飞行,之后飞机过CH台沿着CH的320度方位线保持平飞,飞机之后切入TYN台的280度径向线做背台飞行,最终用TYN台做航迹引导加入航路。(飞行参数:转弯半径=7652.3m)
2.障碍物评估:
障碍物A,高度 868m ,d0= 4km ,dR=8.9km , MOC=103.2 m ,MOA=971.2m
障碍物B,高度 827m ,d0= 4.1km ,dR=8.9km , MOC= 104 m ,MOA=931m
障碍物C,高度878m ,d0=8.6km ,dR= 8.9km ,MOC= 140m, MOA=1018m
障碍物D,高度 831m ,d0= 10km ,dR= 8.9km ,MOC= 151.2m , MOA=982.2m
障碍物E,高度 830m ,d0= 20km ,dR= 8.9km ,MOC=231.2 m, MOA=1061.2m
障碍物F,高度 799m ,d0= 14.2km ,dR= 8.9km ,MOC=184.8 m, MOA=983.8m
障碍物G,高度 789m ,d0= 13km ,dR= 8.9km ,MOC=175.2 m, MOA=964.2m
其中d0为转弯点到跑道末端的距离,dR为障碍物到KK线的最短距离。
经分析,飞机以3.3%的爬升率可以超障。
离场保护区画法:
(1)转弯航迹:在TP线上量取一转弯半径r的点,以该点转弯170
(2)转弯起始保护区的画法:
从距离起飞跑道起始端跑道600m处至DER增加一个宽300m的区域,然后以DER为起点,起始宽度为300m,保护区以跑道中线为轴线向两侧各扩展15,直至TP 。 画出转弯起始保护区。
(3)转弯保护区的画法:
画风螺旋线:沿跑道延长线量出C容差,画出TP 晚。从TP 晚 与转弯外侧直线复飞保护区边线延长线的交点,在TP 晚线上量一转弯半径r ,得到一个点。从该点向TP晚线做一长度为 E 的垂线,以该垂线的顶端为圆心, (r2 + E 2)1/2 为半径画一个略大于 的圆弧。然后从TP 晚与转弯内侧直线复飞保护区边线延长线的交点,在TP 晚的延长线上量一转弯半径 r ,得到一个点。以该点为圆心,E为半径画一个圆。以TP 晚和该圆心的连线与圆的交点为起点,每隔
的圆弧。然后从TP 晚与转弯内侧直线复飞保护区边线延长线的交点,在TP 晚的延长线上量一转弯半径 r ,得到一个点。以该点为圆心,E为半径画一个圆。以TP 晚和该圆心的连线与圆的交点为起点,每隔 确定一点,得到三个点,分别以(r2 + E 2)1/2 ,r+E, r+2E 为半径画一个略大于 的圆弧,将该三点画的圆弧用光滑曲线相连,并与之前的圆弧用公切线相连。
确定一点,得到三个点,分别以(r2 + E 2)1/2 ,r+E, r+2E 为半径画一个略大于 的圆弧,将该三点画的圆弧用光滑曲线相连,并与之前的圆弧用公切线相连。
转弯内侧从距离起飞跑道起始端600m处的跑道上一点到J215(210。)航线上的IAF做虚拟航迹。转弯内侧的保护区边界从距离起飞跑道起始端600m处的转弯起始区作与虚拟航迹平行并向外扩15。的直线与J215(210。)航路上的IAF处的NDB导航台的保护区相连接。
五、进场及进近
进场与起始航段设计
各个进场方式描述:
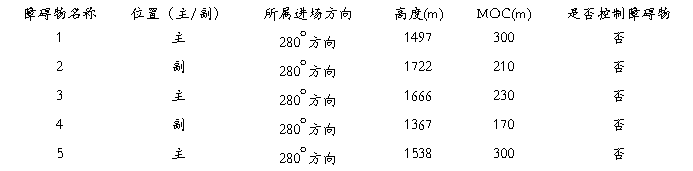
280°方向航路:沿航路至IAF。
210o方向航路:沿J521航路飞至CH台(428KHZ),CH台即为它的IAF。
70o方向航路:由B215航路飞至PA台(482KHZ),PA台即为它的IAF.
进入太原武宿机场有70oB215方向,210oJ251方向和280oB215方向进场。280oB215方向与主降方向夹角小于15度,可采用直线进场。70oB215方向210oJ251方向方向与主降方向相反,因此从这些方向进场的航线汇聚于航路上某一点,之后沿某一角度切入起始进近定位点加入进近航迹。

基本参数设定:
真空速:TAS=509.5km/h
转弯坡度和转弯率:转弯率不超过3度每秒,转弯坡度为对应机型的坡度。
全向风速:30knot
280oB215方向:
进场航段OCH:

OCH=Max{HOBi+MOC},HOBi:进场段保护区障碍物高度
HIAF≥MSA
HIAF=2200m
障碍物评估:
IAF1高度为2200>1770+300,障碍物无影响。
MOCi=[(Li- li)/ Li]×MOC= 140,IAF1的高度为2200>140+140,障碍物无影响。
210o方向航路:
进场航段OCH
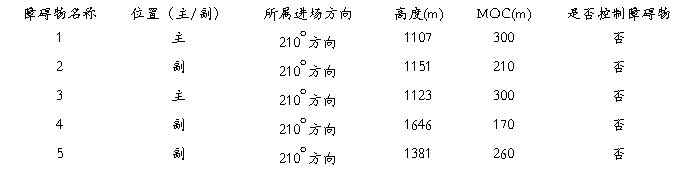
障碍物评估:
1.IAF2的高度为2200>1107+300,障碍物无影响。
2.MOCi=[(Li- li)/ Li]×MOC=210,IAF2的高度为2200>1151+210,障碍物无影响。
3.IAF2的高度为2200>1123+300,障碍物无影响。
4.MOCi=[(Li- li)/ Li]×MOC=170,IAF2的高度为2200>1646+170,障碍物无影响。
5.MOCi=[(Li- li)/ Li]×MOC=260,IAF2的高度为2200>1381+300,障碍物影响。
70o方向航路
进场段OCH
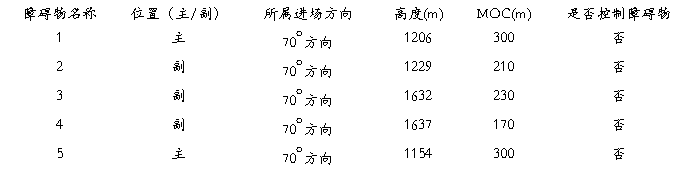
障碍物评估:
1.IAF3的高度为2200>1206+300,障碍物无影响。
2.MOCi=[(Li- li)/ Li]×MOC=210,IAF3的高度为2200>1229+210,障碍物无影响。
3.MOCi=[(Li- li)/ Li]×MOC=230,IAF3的高度为2200>1632+230,障碍物无影响。
4.MOCi=[(Li- li)/ Li]×MOC=170,IAF3DE 高度为2200>1637+170,障碍物无影响。
5.IAF3的高度为2200>1154+300,障碍物无影响。
进近航段梯度:
OCH起:OCH1=1800m OCH2=1900m OCH3=1850m
起始段梯度:
1.B215(280。)航路进场:定位点处的高度为3000m,
Gr=(3000-2600)/46000=0.87%
由于梯度太小,故从定位点3先以5%的下降梯度飞行8km,而后改平飞行至IAF。
2.J215(210。)航路进场:定位点处的高度为3000m,
Gr=(3000-2100)/480000=1.9%
由于梯度太小,故从定位点2先以5%的下降梯度飞行8km,而后改平飞行至IAF。
3.B215(70。)航路进场:定位点处的高度为3000m,
Gr=(3000-2600)/(42000+24000)=0.6%
由于梯度太小,故从定位点先以5%的下降梯度飞行8km,而后改平飞行至IAF。
起始段梯度:Gr=5%, 梯度范围:3.3%-8%
根据IAF位置,重新确定中间航段保护区,并计算OCH中。

障碍物评估:
由IF到IAF的下降梯度为:(1400-1385)/10200=0.15%,障碍物出高度1400-10200*0.15%=1385>775+150,障碍物无影响。
OCH中=775+150+15=940m
中间段梯度=0.16%, 最佳梯度=0%
复飞航段设计
复飞航段描述:最后进近航段飞至MAPt(120m)不能建立目视参考,选择复飞,最迟于SOC点(距MAPt1000m)实施复飞,以2.5%的梯度至指定高度转弯点1100m,右转,切入CH台(428KHZ)89°径向方位线,加入进近航段。
Mapt定位信息:导航台LMM(B 228KHZ),距离跑道入口的距离1000m。
复飞参数计算:

①查表得,C类航空器的最后进近最大速度为:IAS=345km/h=124m/s
TAS=k×IAS=1.0744×124=134(m/s)
②Mapt为导航台,所以Mapt点的定位误差近似为零,纵向容差为:
Y=d=(TAS+19km/h)×3s=(134+19/3.6) ×3=418m
Mapt至最晚点距离为Y/2=209m
③过度容差为X=(TAS+19km/h)×15s=(134+19/3.6) ×15=2088m
检查起始复飞障碍物:

最后进近阶段无障碍物OCH=785+120=905 障碍物处高度为21200*2.5%+905=1435>831+40
初步确定转弯点及转弯高度,确定转弯参数

①查表得,C类航空器的最后进近最大速度为:IAS=445m/h=124m/s
TAS=k×IAS=1.0744×124=134(m/s)
②转弯率R=562tana/v=562×tan15°/134≈1.13(°/s)
③转弯半径r=180v/πR=180×86.08/(3.14×1.75)≈6784(m)
④风速W=56km/h≈15.6m/s
检查复飞障碍物

OCA/H+dOtgZ-MOC=868+12500*2.5%-50=1130>1100