对负温度系数热敏电阻改装温度传感器的探究
河南省鹤壁市浚县第一高级中学高二(14)班物理 陈琦 指导老师:崔希珍
准考证号码: 联系电话:
摘要 本文通过惠斯通电桥对电阻的精确测量,负温度系数热敏电阻 “电阻—温度”特性,对微安表的定标及测量温度校正,最终利用负温度系数热敏电阻改装成测量范围在40℃~80℃的温度传感器,并评定温度传感器精确等级.
关键词 惠斯通电桥,负温度系数热敏电阻(NTC),温度传感器,微安表的定标
1. 引言
负温度系数热敏电阻(NTC)是用氧
化锰等金属氧化物烧结而成的一类半导
体,其“电阻—温度”特性是随温度升高,
阻值降低.负温度系数热敏电阻在自动化
控制、无线电子技术及遥控技术有着广泛
的应用,如图1.
金属热电阻的阻值随温度升高而增
大,其测温范围较大,但灵敏度差.负温度
温范围为40℃~80℃的温度传感器.
2. 实验部分
2.1 实验目的
初步了解热敏电阻“电阻—温度”特性,运用惠斯通电桥组装电路将负温度系数热敏电阻改装成温度传感器,并评定温度传感器精确等级.
2.2 实验器材
惠斯通电桥,检流计(50μA),直流电源(1.5~3V),水银温度计(最小分度值为0.2℃),负温度系数热敏电阻(NTC),加热电炉,电阻箱(0~9999Ω),滑动变阻器,水槽,导线等.
2.3 实验原理
2.3.1惠斯通电桥
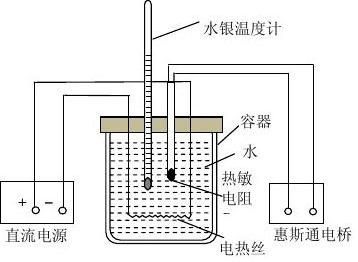
惠斯通电桥是一种可以精确测量电阻的仪器.如图2所示,四个电阻 R0、R1、R2和 Rx 组成一个四边形,其中Rx为待测电阻.在四边形的对角A和B之间连接电源,而在另一对角C和D之间接入检流计G.当C和D两点电势相等即Ig=0时G中无电流通过,电桥便达到了平衡
.
第1页(共5页) 系数热敏电阻的阻值随温度急剧变化,灵敏度更高.故选择热敏电阻制作一台测
此时UAC?UAD UCB?UDB, 因而IRxRx?IR1R1 IR0R0?IR2R2, 由 IRx?IR0 IR1?IR2,
RRR
可得x?0,所以Rx?1R0?kR0.
R2R1R2
电阻R1、R2为电桥的比率臂,由一个旋钮调节,它采用十进制固定值,共分 0.001,0.01,0.1,1,10,100,1000七挡,测量
时应选择合适的挡位.电桥一般自带检流计,如果有特殊的精度要求也可外接检流计,本实验采用外接的检流计来判断电桥的平衡.Rx为待测臂,R0为比较臂,R0作为比较的标准,实验室常用电阻箱. 2.3.2热敏电阻温度传感器原理
负温度系数热敏电阻内部在外电场的作用下,载流子(carrier)会向相反的方向做定向移动,于是在半导体内部形成了电流.当电阻材料温度升高时,会有更多的电子获得能量成为自由电子,同时也会形成更多的空穴,于是电阻导电能力明显增强.
热敏电阻Rt 在惠斯通电桥的一个桥臂上,接通电源后,固定桥臂电阻不变,当温度变化时,由于热敏电阻Rt电阻值的变化,检流计也随温度的变化而变化(即定标曲线).即制成一只热敏电阻温度传感器. 2.4 实验过程
2.4.1“电阻—温度”特性的测定
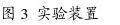
(1)校准检流计的机械零点,在容器中加入适量的水.
(2)按图3所示连接电路,把热敏电阻放入盛满水的容器中,用加热电炉开始加热至40℃,并用水银温度计测量水温.
(3)选择比率为1,不断调节从而测量出热敏电阻Rt的阻值.
(4)从40℃升至80℃,每隔值得到两组数据,取平均值,记录数据.
第2页(共5页)
比较臂R0的阻值,使电桥达到平衡,5℃测量一次Rt的阻值,从80℃降至40℃,每隔5℃再次测量阻值.每个温度
2.4.2 微安表的定标
(1)按图4所示连接电路,将开关S2接在Rt端,使R2=R3, R1的阻值等于40℃时热敏电阻的阻值,R4的阻值等于80℃时热敏电阻的阻值.
(2)将S2接在R4端,调节滑动变阻器W的滑片,使微安表指针指在满刻度处,再将S2接在Rt端.这样的话,如果热敏电阻在40℃环境中,电桥处于平衡状态,微安表示数为零,在80℃环境中,电桥处于不平衡状态,微安表达到满偏.
(3)水温每升高5℃,用相等阻值的电阻
图4 微安表的定标电路
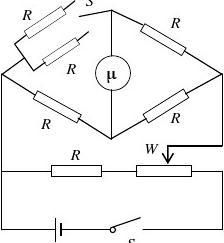
1.5V-
替换热敏电阻,在微安表上标记刻度,0刻度处代表40℃,满刻度处代表80℃,表盘共分40小格,每小格代表1℃.从微安表表盘上可以读出温度的大小. 2.4.3 测量温度校正
用改装好的热敏电阻温度传感器分别测量不同热水的温度,同时使用水银温度计测量水温(作为标准值).根据所测量的数据绘制温度校正曲线图.
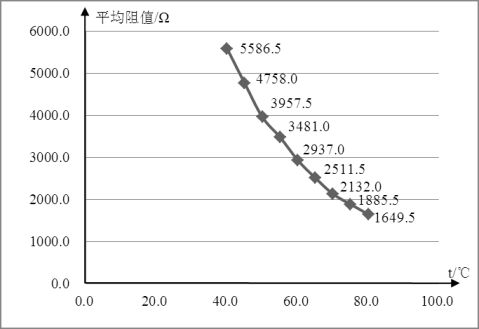
3. 实验结果及数据分析 3.1 “电阻—温度”特性测量数据
在2.4.1中通过惠斯通电桥,对Rt阻值测量数据如下表所示:
表1 “电阻—温度”特性数据表
温度t/℃ 40.0 45.0 50.0 55.0 60.0 65.0 70.0 75.0 80.0
升温时Rt1/Ω
5596 4760 3962 3457 2941 2517 2128 1881 1650
降温时Rt2/Ω
5577 4756 3953 3487 2933 2506 2136 1890 1649
平均阻值Rt/?
5586.5 4758.0 3957.5 3481.0 2937.0 2511.5 2132.0 1885.5 1649.5
绘制“电阻—温度”特性曲线图,如图5所示:
第3页(共5页)
图5 “电阻—温度”特性曲线图
分析实验数据可以得到,热敏电阻的阻值与温度并不一定成确定的函数关系,而是一种线性的相关关系.所以微安表上标定的刻度并不均匀,读出的示数也存在一定的误差,这也是这种传感器的弊端之一.
3.2 温度校正测量数据
表2 温度校正测量表
温度传感器读数T1/℃ 水银温度计读数T2/℃ 读数差ΔT=T1-T2/℃
40.2 40.0 0.2
45.8 45.0 0.8
49.5 50.0 0.5
55.6 55.0 0.6
60.3 60.0 0.3
60.0 65.0 1.0
70.7 70.0 0.7
74.6 75.0 0.4
79.4 80.0 0.6
根据表2测量数据绘制“温度校正曲线图”,如图6所示
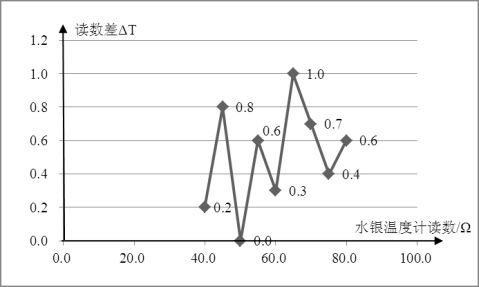
图6 温度校正曲线图
第4页(共5页)
从实验数据可以看出,温度传感器测得的温度在标准值上下浮动,与标准值存在一定的误差.这就说明传感器的仪器选择、方案设计还不够精准.
3.3 评定精确等级
S=最大绝对误差1.0×100%=×100%=2.50% 最大量程80.0-40.0
所以该热敏电阻温度传感器的精确等级为2.5.
3.4 误差分析及改进
(1)由于使用电炉加热水,不同水域的温度可能有所不同,应使用环形玻璃搅拌棒不断搅拌热水.使水温更均匀.定标时热敏电阻要靠近温度计的水银球,以免由于水温不均匀而造成误差.
(2)水温短时间内不一定恒定,应该快速测量数据.
(3)热敏电阻通电一段时间也会产生电热,对温度测量产生影响,故应该选择性质更优良的测量仪器.
4. 实验结论
利用负温度系数热敏电阻“电阻—温度”特性,可以简单制作一个温度传感器,从而较为粗略的测量一定范围内的温度,但由于仪器选择的限制,其精确等级及简便性还有待进一步提高.
5. 参考文献
[1].张维善,主编.传感器[M].高中二年级选修2-3物理课本,2010
[2].李靖子.《热敏电阻改装温度计》
/view/559015e36294dd88d0d26b4e.html
[3].百度百科“热敏电阻”词条
/link?url=e7_HXplREVFvxE6NtOGoCJ5ZePq_6GvBC3cMrSvu9UMPjOXfg3D4uzxDykXBCVos
致谢:
感谢组委会给我这次展示的机会,感谢李海峰老师为我提供大学的实验方法,感谢为我完善论文的邓又源同学.
第5页(共5页)
第二篇:物理实验论文范例
用HRTF进行虚拟声源定位实验
摘 要: 介绍了传统的音频定位理论及存在的缺陷,引出了HRTF的定义,分析了HRTF包含的方位信息,并用我们开发的虚拟听觉空间系统Vasaudio对虚拟声源定位进行了实际测试,最后对测试结果做了分析。
关键词: HRTF; ITD; IID; 虚拟声源定位
Virtual Sound Source Position of HRTF
Abstract:
key words:
Abstract: We introduce the traditional theory of audio position and its limitations first , then we give the definition of HRTF,analyse the position information in HRTF,we also do experiment using Vasaudio system, at last we make a analysis of the experiment result.
key words: HRTF; ITD; IID; virtual sound source position
我们日常听到的立体声录音,虽然有左右声道之分,但就整体效果而言,立体声音乐来自听者面前的某个平面。但希望的是一个在虚拟环境中能辨别声源精确位置的声音系统,而当您听到三维虚拟声音时,音乐声是来自围绕您的一个球形中的任何地方,即声音出现在您头的上方、后方或者在您的鼻子前方。我们把在虚拟场景中的能使用户准确地判断出声源精确位置、符合人们在真实境界中听觉方式的声音系统称为三维虚拟声音。

基金项目:国家973计划资助项目(2002CB312102)
作者简介:xxx。
1 传统音频定位理论
耳间时间差(ITD):从声源发出的声音到达人的左耳和右耳时,有一个先后的过程,这段时间差就是耳间时间差。耳间时间差与声音信号的频率有关,是声源角位置 ,头部半径
,头部半径 和声速
和声速 的函数,在人类听觉定位中占有重要位置。
的函数,在人类听觉定位中占有重要位置。
耳间强度差(IID):由于声音的传播媒质对声波的衰减作用,声音的强度随距离而变化,再加上耳廓和头部的遮挡,最终到达两耳的声音所经过的路径是不同的,使得距离声源近的耳朵听到的声音要强一些,这就是耳间强度差。
在中、低频(f<1.6 kHz),ITD是定位的主要因素;在中频段(f在1.5-4.0 kHz), ITD和IID共同起作用;而在高频(f>4 kHz), IID起主要作用[1]。
传统的音频定位理论的缺陷:
(1)无法解释单耳条件下的定位机理。
(2)存在锥面模糊现象。ITD和IID对左右方位的定位效果非常明显,但对前后和上下方位存在模糊现象。如图1中同一垂直面内的X和Y到达两耳的路径是对称的,以及同一水平面内的A和B到达两耳的路径也是对称的,这就无法依赖ITD和IID来进行准确定位。
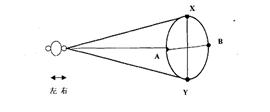
图1 混淆锥示意图
2 用HRTF进行虚拟声源定位
我们介绍一种更为完备的音频定位模型,这就是HRTF。
与头部关联的传递函数(Head-Related Transfer Function, HRTF)描述了声波从声源到双耳的传输过程。事实上从某一方位的声源发出的声信号在到达听者的耳膜之前经过了复杂的传输过程,声信号与听者的头部、肩部以及躯干,耳廓发生了反射、折射、衍射和散射等声学作用,人体的这些部位对声信号的调制作用可以统一的用一个函数来表示即与头部关联的传递函数HRTF。与之相对应的时域表示称为与头部相关联的冲激响应(Head-Related Impulse Response,HRIR)。
国外很多科研机构和高等院校都进行了HRIR的测量工作,我们在本文中使用的数据来源于加州大学戴维斯分校图像处理和集成计算中心(CIPIC)[2],HRIR数据长度为200点,采样频率为44.1KHz。
2.1 HRTF数据中包含的方位信息
我们在图2画出方位角-45°,仰角0°时的左右耳HRIR波形及对应的频谱图。


图2 方位角-45°,仰角0°时的左右耳HRIR及对应的HRTF
(1)耳间时间差(ITD):由于声源靠近左耳,从图2可以看出右耳的HRIR比左耳的HRIR有明显的时间延迟,体现了耳间时间差。
(2)耳间强度差(IID):左耳的HRTF比右耳的HRTF幅度要强一些,体现耳间强度差。
(3)HRTF会出现明显的峰值点和谷值点,有研究表明峰点频率、谷点频率对前后定位起关键作用,且谷点频率是进行定位的主要依据。
(4)HRIR在某些时刻变化剧烈,这是由于耳廓对入射声波的反射作用,左耳的HRIR波形较右耳的HRIR波形起伏变化更为剧烈。在频谱特性上则表现为左耳的HRTF高频分量要充足些。
为了更加突出HRTF中的峰值点和谷值点,人们使用了一些方法对HRTF数据进行处理。文献[3]中对不同频率的HRTF数据加权,来放大原HRTF数据频率间的差异,设 为原HRTF数据,
为原HRTF数据, 为处理后的HRTF数据,则
为处理后的HRTF数据,则

权函数

HRTF反映了人体结构对声音信号的不同响应,因此HRTF有明显的个体差异,人们总是希望使用个性化的HRTF数据进行3D音效的合成,然而对每个人进行HRTF数据的测量是不现实的,有学者建议使用非个性化(non-individualized)的HRTF数据[4]。
2.2 虚拟听觉空间系统Vasaudio
将输入的音频信号分别与指定的方位和距离的左右耳HRTF数据进行卷积,然后通过耳机重发就可以得到具有方位信息的双通道音频信号,如式(1)。基于这个原理我们用VC++编程开发了虚拟听觉空间系统Vasaudio[5]可以实时播放wav格式的音频文件,图3是我们的实现框图。
 (1)
(1)
式中 表示乘法,
表示乘法, 表示卷积,
表示卷积, 表示输入的音频信号,
表示输入的音频信号, 和
和 分别表示左右耳的HRIR数据,
分别表示左右耳的HRIR数据, 和
和 分别表示左右耳的增益,
分别表示左右耳的增益, 和
和 分别表示馈给耳机的左右声道信号。
分别表示馈给耳机的左右声道信号。
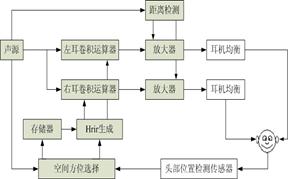
图3 虚拟听觉空间系统实现框图
3 虚拟声源定位测试实验
测试设备为1台计算机、1个高质量声卡、1 幅高质量耳塞式耳机。被测试人员为我们实验室的5名听觉正常的同学。同时我们选择音频测试常用的粉红噪声作为测试音源。测试所用的软件系统为本文前面介绍的VasAudio。
我们实验的目的有两个:一是通过测试比较HRTF的个体化差异,二是我们希望找出几套对大多数人都相对比较适合的HRTF数据,已备我们以后的实验使用。
3.1 测试数据
为了比较HRTF数据的个体差异,我们使用了12套数据进行测量,分别为
(1)CIPIC数据库提供的数据:hrir_final_003, hrir_final_162,
hrir_final_163, hrir_final_165;
(2)做回归分析得到的数据:hrir_final_h_003, hrir_final_h_162,
hrir_final_h_163, hrir_final_h_165;
(3)在时域做平均得到的数据:hrir_final_avg;
(4)用PCA分析综合出来的数据:hrir_final_large_6, hrir_final_middle_6,
hrir_final_small_6。
3.2 测试步骤和结果
为减小辨别难度,只对水平面和中垂面上的角度进行定位测试,其中方位角是15°的倍数,角度从-180°到180°,共有24个方位。垂直方位角为90°(正上方)、60°、30°、0°、-45°共有5个方位。
(1)水平方位角具体测试步骤:
步骤1:先给测试者听分布在前、后、左、右四个方向的声音信号,并告知实际方向;
步骤2:然后分别在这四个声源的附近位置选择一个方位,要求听者进行判断,并给出四个声源的位置(要求说出具体的方位角度);
步骤3:重新随机选择分布在前、后、左、右四个方向的声音信号,重复步骤1,步骤2。
(2)垂直方位角具体测试步骤:
步骤1:对给定的一组数据先给测试者听垂
方位90°、60°、30°、0°、-45°五个方向声音信号;
步骤2:从上述五个方向随机给出一个方向的声音信号,要求听者指出其具体方向角度。重
复该步骤五次直至测完一组数据;
步骤3:重复步骤 1,步骤2,直至测完全部数据。
我们给出了数据标号为hrir_final_162和hrir_final_163的测试结果散点图,见图4和图5。

图4 hrir_final_162测试结果散点图

图5 hrir_final_163测试结果散点图
我们给出水平方位最终的测试统计结果,见表1。
同时我们给出垂直方位最终的测试统计结果,见表2。
表1水平方位测试结果统计表
表2 垂直方位测试结果统计表
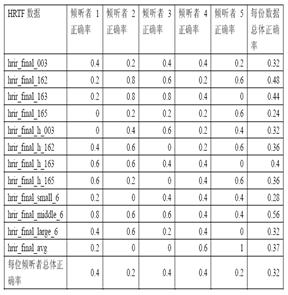
3.3 测试结果分析
(1)HRTF数据包含了大量的方位信息,用HRTF对声源进行定位可以提高定位的准确性,克服传统定位理论的不足。我们在测试中使用的HRTF数据是非个性化的,因此HRTF数据并不一定对每个人都是适合的,这是造成错误率较高的一个原因,另外测试中只有被测试者认定的方位和我们实际使用的方位完全一致时,我们才认为辨别正确,对试验结果的要求有些苛刻(实际上5°到20°的偏差是允许的),这是造成错误率较高的另一个原因。
(2)测试中发现被测试者对标号为hrir_final_middle_6的HRTF数据的辨别正确率较高,原因可能是5位被测试者的头部和外耳尺寸比较中等,与该数据的外耳参数比较吻合。
(3)测试中发现声源定位的前后颠倒和上下颠倒比较严重。前后颠倒从图5和图6可以很明显的看出。垂直方位的测试结果尤为不好,如倾听者1号在使用标号为hrir_final_165和hrir_final_h_003的HRTF数据处理过的音频信号进行垂直方位的辨别时,5个方位完全辨别错误,其他被测试者也有这样的问题。
(4)用耳机重放时存在“头中定位效应”,倾听者感到声像分布在人头内部,这也影响了定位的准确性。有文献[6]指出,增加混响可以加强声像的立体感和深度感,从而改善定位效果,这也是音频定位、多媒体和虚拟现实发展的趋势。
4. 结束语
HRTF包含了大量的方位信息,用HRTF进行虚拟声源定位是当前研究的热点,已经有很多相关成熟的产品和系统出现。本文介绍了HRTF包含的方位信息和个体差异,并用我们开发的Vasaudio系统进行了虚拟声源定位的实际测试。测试结果表明用非个性化HRTF进行定位存在一些问题,如辨别错误率较高,声像的前后混淆和上下混淆比较严重,头中定位效应等,我们的工作仅是初步的,还要采取其他措施来提高虚拟声源定位的准确性。
参考文献:
[1] 钟小丽,谢菠荪. 头相关传输函数的研究进展(一)[J]. 立体声与环绕声,2004,12:44-48.
[2] Algazi V. R., Duda R.O., Thompson D.M., Avendano C.. The CIPIC HRTF database[C]. Applications of Signal Processing to Audio and Acoustics, 20## IEEE Workshop on the 21-24 Oct,2001, Page(s): 99 -102.
[3] 赵自力,黄成伟,高宏,李庆祥. HRTF在虚拟3D立体声中的应用及实验[J].清华大学学报(自然科学版),2001,41(11):74-76.
[4] Elizabeth M. Wenzel, Marianne Arruda, Doris J. Kistler, and Frederic L. Wightman. Localization using nonindividualized head-related transfer functions[J], J.Acoust. Soc. Am, ,July ,1993, 94 (1):111-123.
[5] 王生九.虚拟听觉空间和虚拟环绕声技术的研究及其DSP实现[D].东南大学硕士学位论文,2006.3.
[6] 张承云,谢菠荪,谢志文.立体声耳机重发中头中定位效应的消除[J].电声技术,2000, 8: 4-6.