机械创新设计实验课程考核报告
班 级:机械1107
姓 名:胡德伟
学 号:20116485
组内成员:胡德伟 陈军
考核时间: 2014 年 5 月 26 日
一 课程内容
实验项目一 机器人本体实验
1 实验课程内容:
熟悉AS-UII智能移动机器人的结构,学会AS-UII的连接和检测,并对其进行编程。了解与能力风暴机器人主板配合的AD-EIM系列的多功能扩展卡,学会多功能扩展卡的安装和接口流程图的编程。
2 机器人功能:
机器人设有开关按钮、“电源”指示灯、“充电”指示灯、“充电口”、“下载口”、“复位/ASOS”按钮、“运行”键、“通信”指示灯。“下载口”用于将在电脑上编写好的程序下载到机器人内部存储器中,按击“运行”键就能按照指令行动。
内设有5种传感器:(1)碰撞传感器用于机器人检测来自360°范围内物体的碰撞,使AS-UII机器人遭遇到来自不同方向的碰撞后能够转弯避开并保持正常活动;(2)红外传感器包含红外发射管和红外接收管,由红外发射管发出红外线后遇到障碍反射回来,红外接收管接收到被反射回来的红外线后,通过A/D转换送入CPU进行处理,使机器人能“看到”可视范围的障碍物,而做出相应的动作;(3)光敏传感器用于机器人探测光线;(4)话筒用于机器人感受16Hz—20000Hz的机械波而做出相应的动作;(5)光电编码器用于机器人内部信息的控制反馈。
还设有扬声器、LCD、主动轮及其驱动机构、从动轮、直流电机5种执行部分,用于执行程序所发出的指令。
3 编程方法:
图形化交互式C语言(简称VJC)是用于AD-UII的专用开发系统。VJC1.6开发版是由图形化编程界面和JC代码编程界面组成。图形化编程界面由菜单栏、工具栏、模块库(包括执行器、传感器、控制、程序模块库)、垃圾箱、流程图生成区、JC代码显示区组成。JC代码编程界面由菜单栏、工具栏、编辑窗口、JC信息窗口组成。
用流程图方式编写简单、效率高,可直接从模块库中调用模块。模块的新增、连接、插入、移动、复制、删除为模块的基本操作。VJC的模块由执行器模块、传感器模块、控制模块、程序模块、AS多功能扩展卡模块、通讯模块、伺服电机驱动卡、输入输出模块和计数器模块组成。运用这些模块可完成编程实现预想达到的目的。
4 实验图片:


5 遇到的问题及解决方法:
在编写机器人进行红外线进行障碍物检测,当前方有障碍物时机器人能自动避开,当把程序输入机器人时,发现机器人并不能检测障碍物,经过询问同学,才知道程序有错误,通过改正,最终达到目的。
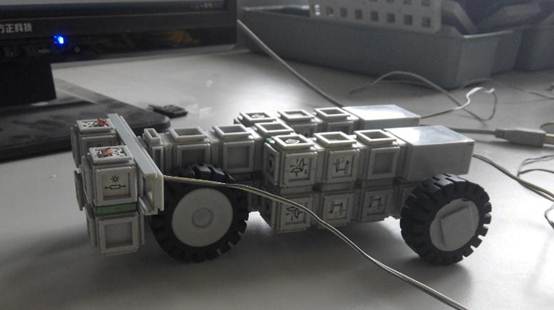
实验项目二 自动导向车实验
1 模型描述(构思、设计、组装、调试):
自动导向车需要有驱动部件、检测部件。将驱动部件和检测部件组合起来就能构成自动导向车。以此思路,驱动部件由电动机、从动轮和主动轮、齿轮组成。检测部件由传感器、导线组成。因此,构思出了导向车的大体模型,再根据所提供的材料,拼接出小车的骨架,从零件到组件再到部件,进行组装。在电脑上编写好程序,下载到AS-UII机器人内部存储器中,将电动机接到机器人的多功能扩展卡上,实现电机的驱动。
2 模型主要组成零件及数量:
AS-UII机器人1个、电动机2个、导线2条、主动轮2个、从动轮2个、传感器1个、5:1齿轮6个、1:1齿轮6个、方块10个。
3 实验图片:
4 小组成员分工:一个人找零件一个人进行组装
(1) 本人承担的工作:组装
(2) 其他成员(如果有) : 陈军
5 模型创新性描述:
可实现小车的自动导向,并能自动控制速度,能任意角度转向。
6 本人遇到的问题及解决方法:
当把编写好的程序输入导向车的电机后,发现导向车并不能运动,经检查每个运动驱件组装正确后,在检查电机,发现电机是坏的,换了一个电机再输入程序,导向车能正常运动,达到实验目的。
实验项目三 自动车床实验
1 模型描述(构思、设计、组装、调试):
车床由底座、主轴箱、溜板箱、尾座、导轨、电动机等部件组成。由真正车床的主要部件可设计模型,以一定的模型来代替真正部件,以各个部件组成的思路设计模型。以从下往上、从左至右的思路进行组装。先设计底座,然后再在底座的基础上安装导轨、溜板箱、主轴箱、尾座。组装好了车床之后,在电脑上编写好程序,下载到AS-UII机器人内部存储器中,将电动机接到机器人的多功能扩展卡上,实现电机的驱动。
2 模型主要组成零件及数量:
底座:1:1齿轮1个、方块24个、螺纹副1个、滑轨2个;
溜板箱:方块8个、滑轨3个、长块5个;
主轴箱:电动机1个、方块4个、1:1齿轮2个、5:1齿轮2个、圆筒1个。
3 实验图片:

4 小组成员分工:一个人负责找零件一个人负责组装
(1) 本人承担的工作: 组装
(2) 其他成员(如果有) : 陈军
5 模型创新性描述:
形象的表现出了真实车床的运动和布局,能清楚的表达出车床的主要功能。
6 本人遇到的问题及解决方法:
在做自动车床模型的过程中,由于模型块的缺少,实验无法正常进行,通过我们组与另一组进行合作共同完成本实验。
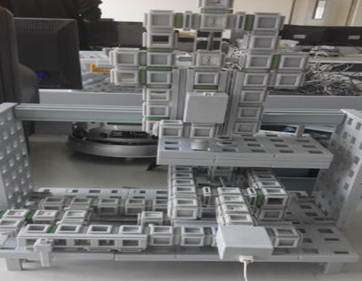
实验项目四 数控加工中心实验
1 模型描述(构思、设计、组装、调试):
数控加工中心由底座、X方向进给机构、Y方向进给机构、Z方向进给机构、主轴箱、导轨、工作台、伺服电动机等部件组成。由真正的数控加工中心的主要部件可设计模型,以模型来代替真正部件,以各个部件组成的思路设计模型。以从下往上、从左至右的思路进行组装。先设计底座,然后再在底座的基础上安装导轨、X方向进给机构、Y方向进给机构、Z方向进给机构。组装好了数控加工中心之后,在电脑上编写好程序,下载到AS-UII机器人内部存储器中,将电动机接到机器人的多功能扩展卡上,实现电机的驱动,可实现数控加工中心的三轴联动。
2 模型主要组成零件及数量:
底座:大底板3个、短柱8个;
X方向进给机构:方块40个、电动机1个、滑轨5个、螺纹副1个、5:1齿轮1个;
Y方向进给机构:方块40个、电动机1个、滑轨5个、螺纹副1个、5:1齿轮1个;
Z方向进给机构:方块40个、电动机1个、滑轨5个、大滑轨1个、螺纹副1个;
工作台:小底板1个。
3 实验图片:
4 小组成员分工:一个人负责Z轴进给方向和其他部分另一个人负责X轴和Y轴进给方向。
(1) 本人承担的工作: Z轴进给方向和其他部分
(2) 其他成员(如果有) :陈军
5 模型创新性描述:
形象的表现出了真实数控加工中心的运动和整体布局,能清楚的表达加工中心的主要功能,并实现了数控加工中心的三轴联动。
6 本人遇到的问题及解决方法:
由于固定了它在X 、Y、Z轴的移动,所以当驱动电机时,在X 、Y、Z轴并没有运动产生。经发现问题后,松开X 、Y、Z轴的固定键,达到了实验目的。
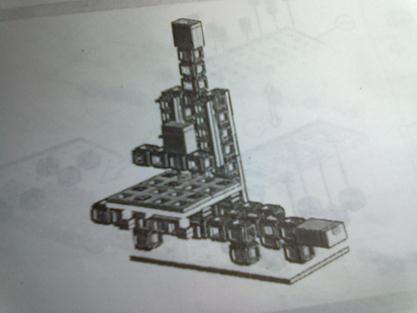
实验项目五 机械手臂
1 模型描述(构思、设计、组装、调试):
机械手臂由底座、沿Z轴旋转机构、沿X轴旋转机构、沿Y轴旋转机构、爪手机构、电动机等部件组成。以各个部件组成的思路设计模型。以从下往上、从左至右的思路进行组装。先设计底座,然后再在底座的基础上安装沿Z轴旋转机构、沿X轴旋转机构、沿Y轴旋转机构、爪手机构。组装好了机械手臂之后,在电脑上编写好程序,下载到AS-UII机器人内部存储器中,将电动机接到机器人的多功能扩展卡上,实现电机的驱动,可实现机械手臂的运动。
2 模型主要组成零件及数量:
底座:大底板1个;
沿Z轴旋转机构:内啮合齿轮1个、小齿轮1个、1:1齿轮2个、5:1齿轮1个、方块4个、电动机1个;
沿X轴旋转机构:内啮合齿轮4个、小齿轮1个、大齿轮2对、1:1齿轮2个、5:1齿轮1个、方块4个、电动机1个;
沿Y轴旋转机构:内啮合齿轮1个、小齿轮1个、大齿轮2对、1:1齿轮2个、5:1齿轮3个、方块8个、小板4个、电动机1个。
3 实验图片:

4 小组成员分工:一个人负责沿X轴旋转机构和沿Y轴旋转机构另一个人负责沿Z轴旋转机构和其他部分。
(1) 本人承担的工作: 沿X轴旋转机构和沿Y轴旋转机构
(2) 其他成员(如果有) : 陈军
5 模型创新性描述:
该模型可实现机械手臂任意角度的抓举,并且能控制手臂旋转时的速度,也为真实的机械手臂的设计和制作提供了一定的思路。
6 本人遇到的问题及解决方法:
在组装驱动部件时,由于没有认真看实验指导书,导致电机无法正常驱动轴的移动。通过将错误的位置重新组装后,能够正常运转,达到实验目的。
二 课程考核
1 模型名称:
小型钻、铣、磨床
2 模型功能:
能够实现钻、磨、铣工件的作用
3 模型照片:
4 模型的创新点:(简述完成模型的创新点)
实现一床多用,多功能加工工件。
5 模型的组成部件名称及数量:
底座:大底板1个;
车刀部分:电机1个、车刀1个;
Z轴进给机构方向:电机1个、滑轨1个、5:1齿轮2个、方块13个、丝杆1个;
X轴进给机构方向:电机1个、滑轨2个、5:1齿轮2个、方块21个、丝杆1个;
6 模型未实现的功能:(如果有的话)
在Y轴方向上无法工作
7 小组成员及分工情况
(1) 小组成员名单 (不超过2人) :胡德伟、陈军
(2) 本人(承担的工作或角色): 进行底板的搭建和X轴进给方向的组装
(3) 其他成员(承担的工作或角色): 进行Z轴的组装和车刀部分
8 作者承担工作情况(仅限本人所做工作)
(1)完成的工作在模型起的作用:
底座支撑整个机床,X轴进给方向使机床能沿X方向运动。
(2)完成的工作使用的元器件名称及数量:
底座:大底板1个;
X轴进给机构方向:电机1个、滑轨2个、5:1齿轮2个、方块21个、丝杆1个;
(3)完成工作过程中遇到的问题及解决方法:无
(4)本部分工作未实现的功能:(如果有的话)无
报告内容需包含上以下各内容点,务删减;本报告每位同学打印一份,以组为单位装订,于课程结束一周内交回
第二篇:机械创新设计实验课程考核报告(1)
机械创新设计实验课程考核报告 班级: 工业0701 姓名:汤云强 学号:20075187
一、机械创新实验课程内容概述
1、机械创新实验课程学习的内容:
1.机械创新的基础知识
2.机械运动形态与控制
3.机构组合原理与创新
4.机构演化、变异原理与创新
5.机构再生运动链原理与创新
6.机械运动方案与创新设计
7.反求工程与创新设计
8.机械创新设计的实例
2、机械创新实验课程学习中遇到的问题及解决方法:
在这次试验中我们还是遇到了不少的问题,首先就是我们的相互配合的能力还比较弱,在一起合作完成我们的试验的时候总会有多多少少的问题出现,比如说在一些问题上出现分歧的时候我们很容易固
执己见,相互争持,不能仔细的听取对方的方案让我们的试验进度大大的减缓,在后来的时候我们在放开心扉一起仔细的探讨大大的提高我们的试验效率。
在这次试验中我们动手能力的缺乏还是大大的体现了出来,由于我们在平时的学习中动手自己完成项目的经验较少,所以在试验中我们经常不能很好的完成很多看似很简单的东西,随着几次试验的进行我们感觉到了明显的提升,能够很好的完成试验,让我们的到了很大的提升。
3、学习机械创新实验课程的收获:
这是一门建立在现有机械设计理论基础之上,吸收科技哲学、认识科学、思维科学、设计方法学、发明学、创造学等相关学科的有益知识,经过交叉溶合而形成的一种机械设计技术和现代化机械设计方法。通过本课程的实验,使我们进一步掌握机械创新设计的基本理论、基本方法和具体步骤,锻炼我们的创新能力、工程实践能力和分析问题、解决问题的综合能力,也能大大的提高我们的团队合作能力。
二、完成模型描述
1、模型名称:塔吊模型
2、模型功能:能完成物品的起吊和转运
3、模型的创新点:将螺杆运用于受力较大的吊钩运动中,能很好的避免实际中钢绳传动效率低的问题,提高塔吊的工作能力。
4、模型的组成部件名称及数量:底座一个 承力柱一根 横梁一根 吊钩传动槽一个 吊钩一个
5、模型未实现的功能:(如果有的话)
三、模型创新描述
我们的模型是一个塔吊模型,在这个模型我们采用的是传动杆完成塔身的转动,相对于传统的塔吊我们将动力系统放在了地面减少了塔身的负担,提高了塔身的承载能力。关于吊钩的传动我们采用的丝杆传动这样能提高传动效率,减少塔吊的能量消耗,提高塔吊的工作效率。
四、小组成员及分工情况
1、小组成员名单:汤云强 韦朝航 陈炫宇 张庆
2、成员甲:塔吊底座组装设计以及底座动力设计
3、成员已:塔吊承重柱组装设计以及动力传动设计
4、成员丙: 横梁以及其动力设计组装
5、成员丁:程序设计以及整体组装调试
五、作者承担工作情况(仅限本人所做工作)
1、完成的工作在模型起的作用:完成主体设计,完成塔吊底座组装设计以及底座动力设计
2、完成的工作使用的元器件名称及数量:底板数个 5:1变速器两个 转向器1个 电动机一个
3、完成工作过程中遇到的问题及解决方法:
在最开始的设计中我们一直没有找到将动力放到地面上面的方法,这给我造成了很大的困扰,后来和同学讨论找到了通过传动将动力系统放到地面的方法。
在完成动力传动的时候由于没有选好传动比例,在完成模型后出现电动机没有办法带动系统的问题,通过改变传动比例很好的完成了这个问题。
4、本部分工作未实现的功能:(如果有的话)
备注:
1、
2、
回报告内容需包含上述各内容点,务篡改 本报告以打印方式,按照分组成员装订,于考核一周后交