课程设计报告
课程名称: 单片机课程设计
题 目: 基于51单片机PID直流电机调速
摘要
随着科技的日益进步,对自动化的要求也越来越高,直流电动机应用领域更加广泛。例如,军事方面的雷达天线惯性导航火炮瞄准等控制;工业方面的数控机床加工生产设备工业机器人的控制;计算机外围设备及办公设备中各种光盘驱动器扫描仪打印机传真机复印机等设备的控制。因此,设计一款可控性好精度高的电机控制系统是非常有意义的。本文介绍了一种以AT89S51单片机为控制核心的直流电机控制系统模型。
本设计主要研究了利用MCS-51系列单片机控制PWM信号从而实现对直流电机转速进行控制的方法。设计中采用了专门的芯片组成了PWM信号的发生系统并且对PWM信号的原理、产生方法以及如何通过软件编程对PWM信号占空比进行调节从而控制其输入信号波形等均作了详细的阐述。另外本系统中使用了红外对管对直流电机的转速进行测量,经过整形电路后将测量值送到单片机,并且最终作为反馈值输入到单片机进行PID运算从而实现了对直流电机速度的控制。在软件方面,文章中详细介绍了PID运算程序初始化程序等的编写思路和具体的程序实现。
[关键字] PWM信号 红外对管 PID运算
目录
一、设计任务、要求... 3
1.1 设计任务... 3
1.2 设计要求... 3
二、方案总体设计... 4
三、硬件设计... 5
3.1 单片机最小系统... 5
3.2 四位数码管显示... 5
3.3 电机驱动电路... 5
3.4 红外测速电路... 6
3.5 整形电路... 7
3.6 整体电路... 7
四、软件设计... 8
4.1 算法实现... 8
4.1 主程序流程... 8
4.2 定时器1中断流程... 9
五、硬件设计... 10
5.1 软件介绍... 10
5.2 硬件调试... 10
5.3 软件调试... 10
六、设计总结、心得体会... 11
七、参考文献... 12
附录一:源程序... 13
一、设计任务、要求
1.1 设计任务
设计一个基于51单片机的PID直流电机调速系统。
1.2 设计要求
根据单片机原理及应用课程的要求,主要进行两个方面的设计,即单片机最小系统和存储器扩展设计、接口技术应用设计。其中,单片机最小系统主要要求学生熟悉单片机的内部结构和引脚功能、引脚的使用、复位电路、时钟电路、4个并行接口和一个串行接口的实际应用,从而可构成最小应用系统,并编程进行简单使用。
具体的要求有以下几点:
ü 系统采用DXP软件设计电路原理,设计布局必须合理美观;
ü 实物采用洞洞板焊接,布局采用万能板专用绘图软件;
ü 4位数据显示功能;
ü 具有至少2个独立按键,通过按键可设置不同运行方式;
ü 系统具有较好的模块化,功能、程序等分块合理;
二、方案总体设计
方案一:用三极管搭H桥,实现电机正反转的控制。电路部分较为复杂,焊接也显得更麻烦一点。
方案二:以驱动芯片ULN2003作为电机驱动,ULN2003是高压大电流达林顿晶体管阵列系列产品,具有电流增益高、工作电压高、温度范围宽等特点。UNL2003是是漏极开路输出,它的驱动能力为500mA,能够驱动直流电机、步进电机等。
由于这里不需正反转的控制,也为了使焊接更方便,提高成功率。所以电机芯片驱动方案选择方案二。
总体设计:

图1 整体硬件设计
总体方案工作原理:使用STC89C52单片机作为主控制芯片,按键控制改变电机的设定值,通过红外对管进行转速的测量,与设定值进行比较,通过PID算法控制电机达到设定转速。
三、硬件设计
3.1 单片机最小系统
单片机最小系统由51单片机,晶振电路,复位电路,电源组成。大家都比较熟悉,这里不再赘述。
3.2 四位数码管显示
在应用系统中,设计要求不同,使用的LED显示器的位数也不同,因此就生产了位数,尺寸,型号不同的LED显示器供选择,在本设计中,选择4位一体的数码型LED显示器,简称“4-LED”。本系统中前三位显示电压的整数位,最后一位显示转速的小数位。
4-LED显示器引脚如图2所示,是一个共阴极接法的4位LED数码显示管,其中a,b,c,e,f,g为4位LED各段的公共输出端,1、2、3、4分别是每一位的位数选端,dp是小数点引出端,4位一体LED数码显示管的内部结构是由4个单独的LED组成,每个LED的段输出引脚在内部都并联后,引出到器件的外部。
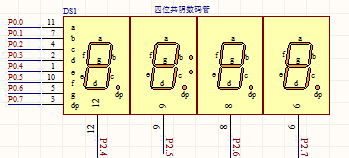
图2 四位LED引脚
3.3 电机驱动电路
电机驱动电中是采用ULN2003来驱动。ULN2003是高耐压、大电流达林顿陈列,由七个硅NPN达林顿管组成。该电路的特点:ULN2003的每一对达林顿都串联一个2.7K的基极电阻,在5V的工作电压下它能与TTL和CMOS电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据,输入5VTTL电平,输出可达500mA/50V。
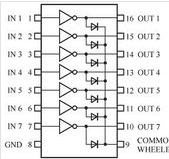
图3 ULN2003引脚图
图3为ULN2003的引脚图,其中IN1~IN7为输入控制端;OUT1~OUT7为输出端;8脚为芯片的接地端;9脚为公共端,该脚是内部7个续流二极管负极的公共端,各二极管的正极分别接各达林顿管的集电极。用于感性负载时,该脚接负载电源正极,实现续流作用。如果该脚接地,实际上就是达林顿管的集电极对地接通。
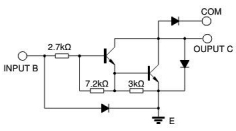
图4 一对达林顿管
图4为一对达林顿管示意框图,它反映了每一对输入与输出的内部结构。从图中可看出,它内部实际就是由三极管组成,所以实际电机驱动用三极管搭H桥或其他驱动电路也是可以实现驱动电机的。
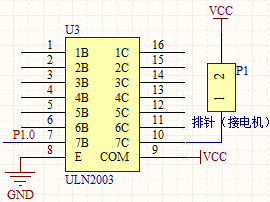
图5 电机驱动电路
图5为本设计的直流电机驱动电路。当P1.0中为高电平时,其内部三极管导通,使电机转动。当P1.0为低电平时,内部三极管截止,电路断开,电机停止转动。所以在程序中可以利用P1.0口输出PWM波来控制电机的转速。
3.4 红外测速电路
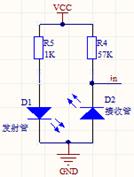
图6 红外对管测速
红外测速部分电路如图6所示,发射管工作时发出红外线,当接收管收到红外信号时,其电阻变小(本设计相当于从无穷大变到1k左右)。利用其电阻变化,改变接收管分压情况。挡片是利用圆盘上剪四个孔,当挡片随电机转动时,接收管两端电平发生变化,产生脉冲。
3.5 整形电路
本设计的整形电路是用555定时器接成的施密特触发器。
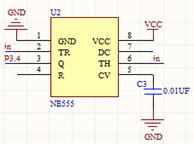
图7 整形电路
其电路如图7所示,其特性为,输入信号从0逐渐升高的过程:当输入信号in< 1/3VCC,3引脚输出高电平;当1/3VCC < in < 2/3VCC,3引脚输出高电平保持不变;当in> 2/3VCC,3引脚输出低电平。
当输入信号从高于2/3VCC开始下降的过程:当1/3VCC < in < 2/3VCC,3引脚输出低电平不变;当in< 1/3VCC 3引脚输出高电平。
整形效果如下图所示:
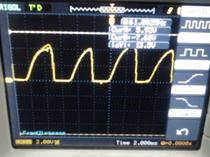
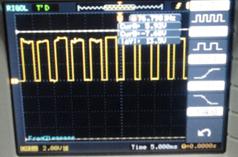
图8 脉冲整形前后变化
3.6 整体电路
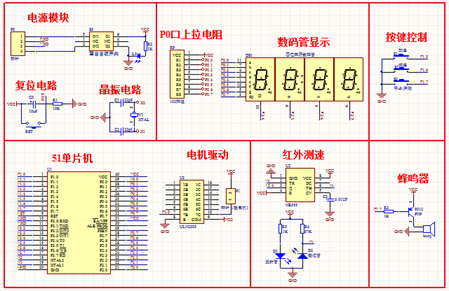
图9 整体电路原理图
四、软件设计
4.1 算法实现
(1) PID算法
数字PID调节器结构简单,参数易于调整。将其移植到单片机控制系统,通过软件编程实现,根据经验在线调整参数,灵活性强。采用数字PID调节算法,根据经验和实践, 在线整定参数,具有很强的灵活性。PID控制的运算公式为:

因此要实现PID控制就必须在单片机上存在上述算法,其流程图如图所示:
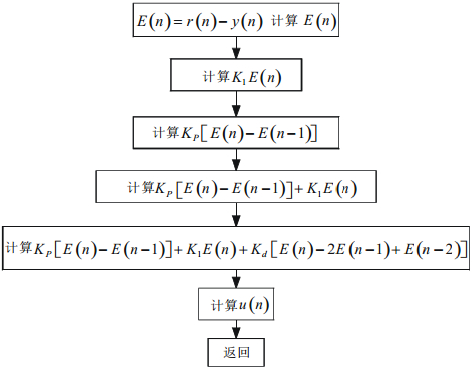
图10 PID算法流程图
(2)电机速度采集算法
本系统中电机速度采集是一个非常重要的部分,它的精度直接影响到整个控制的精度。在设计中采用了红外传感器做为测速装置,其计算公式为:
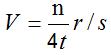
这里主要是采集圆盘边缘上凹槽数的多少决定的,圆盘有4个凹槽,每转一圈便会产生4个脉冲,通过上面的等式就可得出电机的转速。
4.1 主程序流程
主流程图如图11所示:

图11 主程序流程图
其中中断初始化中设置为定时器TO计脉冲数,定时器T1为高优先级中断。数码管显示的速度为三位整数,一位小数。当测得的速度在设定速度的正负5的范围之外时,蜂鸣器响。
4.2 定时器1中断流程

图12 T1中断程序流程图
五、硬件设计
5.1 软件介绍
Keil C51是美国Keil Software公司出品的51系列兼容单片机C语言软件开发系统,与汇编相比,C语言在功能上、结构性、可读性、可维护性上有明显的优势,因而易学易用。Keil提供了包括C编译器、宏汇编、连接器、库管理和一个功能强大的仿真调试器等在内的完整开发方案,通过一个集成开发环境(uVision)将这些部分组合在一起。运行Keil软件需要WIN98、NT、WIN20##、WINXP等操作系统。如果你使用C语言编程,那么Keil几乎就是你的不二之选,即使不使用C语言而仅用汇编语言编程,其方便易用的集成环境、强大的软件仿真调试工具也会令你事半功倍。
5.2 硬件调试
当认真的把板子焊接完成,之后也认真的检查了一下连接线路,确认无误后,将程序下载进去后。发现数码管显示不正常,再次将与数码管连接的P0口线路认真检查一下后,发现与之连接的一个I/O口有虚焊的现象。将虚焊点重新焊接后显示正常。但单片机走程序时,第二位数码管显示变动很大,比电机速度的改变大很多。最后认真检查程序,发现程序中显示的那一部分按错了一个符号,导致其运算结果不正确。
5.3 软件调试
软件编写是在KEIL开发环境上编写的。是采用模块化程序的方法,各个功能的程序都使用不同的子程序编写。需要使用的时候,在主函数中进行调用即可。当发现问题的时候,首先检查主函数的调用是否有问题,如果没有问题,就到相应的子函数中,对子函数进行检查。可以使用Keil中的单步调试,查看程序运行是否流畅,同时还可以查看相应变量的值以及寄存器的值,这样就可以知道程序那里出现了问题。而不应该认为是软件出现了问题。或者认为是硬件连接的问题,因为之前的硬件都已经调试过没有问题了。在软件调试的过程中就不应该去怀疑硬件。
其实软硬件的调试是相辅相成的,并没有非常明确的界限。硬件的调试有时候需要通过软件的现象来检测,光看电路图是,或者只是单纯地用万用表检查有没有短路也是没有意义的。
六、设计总结、心得体会
设计不仅是对前面所学知识的一种检验,而且也是对自己能力的一种提高。下面我对整个设计的过程做一下简单的总结。第一,接到任务以后进行选题。选题是设计的开端,选择恰当的、感兴趣的题目,这对于整个设计是否能够顺利进行关系极大。好比走路,这开始的第一步是具有决定意义的,第一步迈向何方,需要慎重考虑。否则,就可能走许多弯路、费许多周折,甚至南辕北辙,难以到达目的。因此,选题时一定要考虑好了。第二,题目确定后就是找资料了。查资料是做设计的前期准备工作,好的开端就相当于成功了一半,到图书馆、书店、资料室去虽说是比较原始的方式,但也有可取之处的。总之,不管通过哪种方式查的资料都是有利用价值的,要一一记录下来以备后用。第三,通过上面的过程,已经积累了不少资料,对所选的题目也大概有了一些了解,这一步就是在这样一个基础上,综合已有的资料来更透彻的分析题目。第四,有了研究方向,就应该动手实现了。其实以前的三步都是为这一步作的铺垫。通过这次设计,我对数字电路设计中的逻辑关系等有了一定的认识,对以前学的数字电路又有了一定的新认识,温习了以前学的知识,就像人们常说的温故知新,但在设计的过程中,遇到了很多的问题,有一些知识都已经不太清楚了,但是通过一些资料又重新的温习了一下数字电路部分的内容。在这次设计中也使我们的同学关系更进一步了,同学之间互相帮助,有什么不懂的大家在一起商量,听听不同的看法我们更好的理解知识,所以在这里非常感谢帮助我的同学。
在此要感谢我的指导老师,感谢老师给我这样的机会锻炼。在整个设计过程中我懂得了许多东西,也培养了我独立工作的能力,树立了对自己工作能力的信心。而且大大提高了动手的能力,使我充分体会到了在创造过程中的探索的艰难和成功的喜悦。虽然这个项目还不是很完善,但是在设计过程中所学到的东西是这次设计的最大收获和财富,将使我终身受益。
七、参考文献
1. 李朝青.单片机原理及接口技术(简明修订版).北京:北京航空航天大学出版社,1999
2. 李群芳,等.单片微型计算机与接口技术.北京:电子工业出版社,2001
3. 钱逸秋.单片机原理与应用.北京:电子工业出版社,2002
4. 朱定华,等.单片微型计算机原理与应用.北京:清华大学出版社,2003
5. 何立民.单片机高级教程.北京:北京航空航天大学出版社,2004
附录一:源程序
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
uchar code table[10]={0x3f,0x06,0x5b,
0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; //共阴数码管显示码(0-9)
sbit xiaoshudian=P0^7;
sbit wei1=P2^4; //数码管位选定义
sbit wei2=P2^5;
sbit wei3=P2^6;
sbit wei4=P2^7;
sbit beep=P2^3; //蜂鸣器控制端
sbit motor = P1^0; //电机控制
sbit s1_jiasu = P1^4; //加速按键
sbit s2_jiansu= P1^5; //减速按键
sbit s3_jiting=P1^6; //停止/开始按键
uint pulse_count; //INT0接收到的脉冲数
uint num=0; //num相当于占空比调节的精度
uchar speed[3]; //四位速度值存储
float bianhuasudu; //当前速度(理论计算值)
float reallyspeed; //实际测得的速度
float vv_min=0.0;vv_max=250.0;
float vi_Ref=60.0; //给定值
float vi_PreError,vi_PreDerror;
uint pwm=100; //相当于占空比标志变量
int sample_time=0; //采样标志
float v_kp=1.2,v_ki=0.6,v_kd=0.2; //比例,积分,微分常数
/*********************************************
* 函数名称:delay *
* 函数功能:不精确的延时 *
*********************************************/
void delay (uint z)
{
uint x,y;
for(x=z;x>0;x--)
for (y=20;y>0;y--);
}
/*********************************************
* 函数名称:time_init *
* 函数功能:将定时器初始化 *
**********************************************/
void time_init()
{
ET1=1; //允许定时器T1中断
ET0=1; //允许定时器T0中断
TMOD = 0x15; //定时器0计数,模式1;定时器1定时,模式1
TH1 = (65536-100)/256; //定时器1值,负责PID中断 ,0.1ms定时
TL1 = (65536-100)%256;
TR0 = 1; //开定时器
TR1 = 1;
IP=0X08; //定时器1为高优级
EA=1; //开总中断
}
/*********************************************
* 函数名称: keyscan *
* 函数功能: 按键扫描,实现加、减速 *
开始/停止 *
**********************************************/
void keyscan()
{
float j;
if(s1_jiasu==0) //加速
{
delay(20);
if(s1_jiasu==0)
vi_Ref+=10;
j=vi_Ref;
}
while(s1_jiasu==0);
if(s2_jiansu==0) //减速
{
delay(20);
if(s2_jiansu==0)
vi_Ref-=10;
j=vi_Ref;
}
while(s2_jiansu==0);
if(s3_jiting==0)
{
delay(20);
motor=0;
P1=0X00;
P3=0X00;
P0=0x00;
}
while(s3_jiting==0);
}
/*********************************************
* 函数名称: v_PIDCalc *
* 函数功能:对测得的速度进行PID运算,其 *
* 返回值为运算后的速度 *
**********************************************/
float v_PIDCalc(float vi_Ref,float vi_SpeedBack)
{
register float error1,d_error,dd_error;
error1=vi_Ref-vi_SpeedBack; //偏差的计算
d_error=error1-vi_PreError; //误差的偏差
dd_error=d_error-vi_PreDerror; //误差变化率
vi_PreError=error1; //存储当前偏差
vi_PreDerror=d_error;
bianhuasudu=(v_kp*d_error+v_ki*vi_PreError+v_kd*dd_error);
return (bianhuasudu);
}
/*********************************************
* 函数名称: v_Display *
* 函数功能:将速度值送给四位数码管显示 *
**********************************************/
void v_Display()
{
uint sudu;
sudu=(int)(reallyspeed*10); //乘以10之后强制转化成整型
speed[3]=sudu/1000; //百位
speed[2]=(sudu%1000)/100; //十位
speed[1]=(sudu%100)/10; //个位
speed[0]=sudu%10; //小数点后一位
wei1=0; //第一位打开
P0=table[speed[3]];
delay(5);
wei1=1; //第一位关闭
wei2=0;
P0=table[speed[2]];
delay(5);
wei2=1;
wei3=0;
P0=table[speed[1]];
xiaoshudian=1;
delay(5);
wei3=1;
wei4=0;
P0=table[speed[0]];
delay(5);
wei4=1;
}
/*********************************************
* 函数名称:BEEP *
* 函数功能:当速度超过一定范围,蜂鸣器响 *
**********************************************/
void BEEP()
{
if((reallyspeed)>=vi_Ref+5||(reallyspeed<=vi_Ref-5))
{
beep=~beep;
delay(4);
}
}
/*********************************************
* 函数名称:main *
* 函数功能:扫描按键,显示速度,报警 *
**********************************************/
void main()
{
time_init();
motor=0;
while(1)
{
v_Display();
BEEP();
}
if(s3_jiting==0) //对按键3进行扫描,增强急停效果
{
delay(20);
motor=0;
P1=0X00;
P3=0X00;
P0=0x00;
}
while(s3_jiting==0);
}
/*********************************************
* 函数名称:timer0 *
* 函数功能:工作在计数方式,储存脉冲数 *
**********************************************/
void timer0() interrupt 1
{
}
/*********************************************
* 函数名称:timer1 *
* 函数功能:进行PID计算和速度计算 *
**********************************************/
void timer1() interrupt 3
{
TH1 = (65536-100)/256; //1ms定时
TL1 = (65536-100)%256;
sample_time++;
if(sample_time==5000) //采样时间0.1ms*5000=0.5s
{
TR0=0; //关闭定时器0
sample_time=0;
pulse_count=TH0*255+TL0; //保存当前脉冲数
keyscan(); //扫描按键
reallyspeed=pulse_count/(4*0.6); //计算速度
pwm=pwm+v_PIDCalc(vi_Ref,reallyspeed);
if(pwm<0)pwm=0;
if(pwm>100)pwm=100;
TH0=TL0=0;
TR0=1; //开启定时器0
}
num++;
if(num==pwm) //此处的num值,就是占空比
{
motor=0;
}
if(num==100) //100相当于占空比调节的精度
{
num=0;
motor=1;
}
}