判断题
(1) 任一线性连续定常系统的系统矩阵均可对角形化。(×)
(2) 设 是常阵,则矩阵指数函数满足
是常阵,则矩阵指数函数满足 。(√)
。(√)
(3) 对于SISO线性连续定常系统,在状态方程中加入确定性扰动不会影响能控制性。(√)
(4) 对SISO线性连续定常系统,传递函数存在零极点对消,则系统一定不能观且不能控制。(×)
(5) 对线性连续定常系统,非奇异变换后的系统与原系统是代数等价的。(×)
(6) 对线性连续定常系统,非奇异变换后的系统特征值不变。(√)
(7) 线性连续定常系统的最小实现是唯一的。(×)
(8) 给定一个标量函数 一定是正定的。(×)
一定是正定的。(×)
(9) 稳定性问题是相对于某个平衡状态而言的。(√)
(10) Lyapunov第二法只给出了判定稳定性的充分条件。(√)
(11) 对于一个能观能控的线性连续定常系统,一定具有输出反馈的能镇定性。(×)
(12) 若一个线性连续定常系统完全能控,则该系统一定可能通过状态反馈镇定。(√)
(13) 若一个线性连续定常受控系统能控但不能观,则通过输出反馈构成的闭环系统也是同样能控但不能观的。(√)
(14) 针对某一问题,镇定性问题完全可以通过极点配置方法解决。(√)
(15) 能镇定的线性连续定常系统可以通过状态反馈将所有极点任意配置。(×)
(16) 对于SISO线性连续定常系统,状态反馈后形成的闭环系统零点与原系统一样。(√)
(17) 对于线性连续定常系统,状态反馈不改变系统的能观性,但不能保证系统的能控性不变。(×)
(18) 对一个系统,只能选取一组状态变量。(×)
(19) 状态转移矩阵由系统状态方程的系统矩阵决定,进而决定系统的动态特性。(√)
(20) 若一个系统是李雅普诺夫意义下稳定的,则该系统在任意平衡状态处都是稳定的。(×)
(21) 若一个对象的线性连续时间状态空间模型是能控的,则其离散化状态空间模型也一定是能控的。(×)
(22) 对一个给定的状态空间模型,若它是状态能控的,则也一定是输出能控的。(×)
(23)对系统 ,其Lyapunov意义下的渐近稳定性和矩阵A的特征值都具有负实部是一致的。(√)
,其Lyapunov意义下的渐近稳定性和矩阵A的特征值都具有负实部是一致的。(√)
(24)根据线性二次型最优控制问题设计的最优控制系统一定是渐近稳定的。(√)
(25)对不能观测的系统状态可以设计降维观测器对其观测。(×)
(26)对于线性连续定常系统,用观测器构成的状态反馈系统和状态直接反馈系统具有相同的传递函数矩阵。(√)
(27)最优是相对于某一指标而言的。(√)
(28)对于一个n维的线性定常连续系统,若其完全能观,则利用状态观测器实现的状态反馈闭环系统是2n维的。(√)
(29)对于任一线性定常连续系统,若其不可观,则用观测器构成的状态反馈系统和状态直接反馈系统是不具有相同的传递函数矩阵的。(×)
(30)基于状态观测器的反馈闭环系统与直接状态反馈闭环系统的响应在每一时刻都是相等的。(×)
(31)对于线性定常连续系统,就传递特征而言,带状态观测器的反馈闭环系统完全等效于同时带串联补偿和反馈补偿的输出反馈系统。(√)
(32)动态规划方法保证了全过程性能指标最小,但并不能保证每一级性能指标最小。(√)
(33)动态规划方法给出的是最优控制的充分条件而非必要条件。(×)
(34)对于线性连续定常系统,极点配置法与线性二次型最优控制采用的反馈方式是一样的,而反馈系数矩阵的构造方法不一样。(√)
(35)对于线性连续定常系统的输出调节器问题,采用的是输出反馈方式构造控制器。(×)
(37)对于自治的线性连续定常系统,Riccati方程就是一个Lyapunov方程。(√)
(38)非线性系统在有些情况下也满足叠加定律。(×)
(39) 给定一个系统: (A、B、C 是常阵),一定是严格的线性定常连续系统。(×)
(A、B、C 是常阵),一定是严格的线性定常连续系统。(×)
(40)对于线性系统有系统特征值和传递函数(阵)的不变性以及特征多项式的系数这一不变量。(√)
(41)任何一个方阵的均可化为对角化的Jordan型。(×)
(42)在反馈连接中,两个系统(前向通道和反馈通道中)都是正则的,则反馈连接也是正则的。(×)
(43)线性系统的状态转移矩阵 是唯一的。(√)
是唯一的。(√)
(44)判定是否为状态转移矩阵其条件是只要满足 =A。(×)
=A。(×)
(45)采用理想采样保持器进行分析较实际采样保持器方便。(√)
(46)若A、B是方阵,则必有 成立。(×)
成立。(×)
第二篇:现代控制理论试卷
重庆三峡学院 20## 至 20## 学年度第 1 期
现代控制理论课程考试试题册A卷
试题使用对象 : 物理与电子信息 院(系) 02 级 电子信息工程专业(本科)
命题人:## 考试用时 120 分钟 答题方式采用: 闭卷
说明:1、答题请使用黑色或蓝色的钢笔、圆珠笔在答题纸上书写工整。
2、考生应在答题纸上答题,在此卷上答题作废。
一、 填空(本题共20 分,共10小题,每题各2 分)
l.系统状态完全能控性是指 。
2.系统状态的能观性是指 。
3.系统的对偶原理: 。
4.对于一个不能控和不能观的系统,按系统结构标准分解为: 、 、 、
的四个子系统。
5.所谓传递函数的实现问题, 。 = 。
= 。
6.对于单输入单输出系统,系统能控、能观的充要条件是 。
7.系统平衡状态的渐近稳定性的定义为: 。
8.常用W(S)的标准实现型式有 、 、 、 。
9.全维观测器是指 。
10.受控系统 ,采用状态反馈能镇定的充分必要条件是 。
,采用状态反馈能镇定的充分必要条件是 。
二、(本题共15 分)设系统的微分方程为

试求系统的状态方程和输出方程。
三、(本题共15分)已知输入量为r维的n阶系统:
X=AX+Bu
在零初始条件下,求输入量为阶跃输入函数:u=v*1(t)时的响应。
四、 (本题共15 分,共2小题)
(本题共15 分,共2小题)
1)已知系统的状态方程,试判别其能控性。

2)已知系统的状态方程和输出方程,试判别其能观性。


五、(本题共15分)已知非线性系统状态方程为:

其中,a>0。试判断系统的稳定性。
六、(本题共20分)已知受控系统的传递函数为:
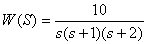
试设计状态反馈阵K,使闭环系统的三个极点为:-2,-1 j.
j.