GPS控制网技术总结
1、概况
GPS卫星定位技术是一项多功能、高效、快速、省时和高精度的定位技术,已在国内外测量界得到推广和应用,特别在城市控制测量、工程测量和地籍测量中得到广泛应用。
为了满足我院测绘工程专业学生教学实习和学院建设的需要,在辽宁工程技术大学校园内建立GPS控制网,其控制面积为0.35㎞2。该控制网使用3台高精度的测量型静态中科力达9600 单频GPS接收机进行外业观测。
本控制网利用以前埋设的控制点,由学生完成选点、网的技术设计、外业观测、数据处理工作,前后历时7天。
1.1测区已有控制资料及利用情况
(1)已收集到的地形图资料有校园示意图。
(2)控制点资料。
1.2 坐标系统和高程系统
平面坐标系采用地方独立坐标系,投影面为参考椭球体;高程系统采用1985国家高程基准。
2、GPS控制网的布设
2.1 GPS控制网的布设方案及要求
(1)以GPS控制网作为学院的首级控制,本GPS控制网以同步环为基本单元,采用边连式布网,将1个已知点和10个待定点连接成如下网形:(网型附后)
(2)GPS控制网的最长边为0.6716km,最短边为0.1846km,平均边长为0.3705km。图形结构较好。本网共布设11个点,其中1个已知点为地方独立坐标系下的GPS点,10个未知点为GPS点。
(3)GPS控制网中联测了1个地方独立坐标系下的GPS点,以便将GPS定位结果转换至地面坐标系时作为起算数据。
2.2选点、埋石
在测区范围内共布设了10个控制点,全部作为GPS点,在点位选择上主要考虑点位分布合理,密度均匀,而且便于直接使用。根据GPS测量规范要求,首先充分利用原有控制点点位标石;其次点位应选在视野开阔、点位周围高度角大于15度以上天空无障碍物(如树林、高楼、水塔及高程建筑物等)的地方;无强烈反射无线电波的金属或其它障碍物或大范围水面,点位远离强功率电台、电视发射塔、微波中继站、高压变电所等要求。
2.3 GPS网的主要指标
网共设计11个测点,其中已知点1个,新建GPS点7个。共设计6个时段,设站1次的有2个,设站2次的有5个,设站3次的有2个,重复设站次数为2,大于《规范》规定的≥1.6的要求。
3 GPS外业数据采集
3.1所用仪器
使用3台高精度的测量型静态中海达8200E 单频GPS接收机以静态定位方式进行同步观测。该机具有12个通道、测量相量为L1载波相位,其内存为64MB,采样间隔设为5秒,其水平标称精度:±5mm+1ppm×D,高程标称精度为±10mm+1ppm×D。其中D为所测距离,以km为单位。
3.2仪器检验
3.2.1 GPS接收机的检视
仪器在使用前,按规程规定的项目,分别按一般检视和实地检验进行了全面检验。
3.2.2一般检视
(1)接收机及天线型号应正确,主机与配件齐全;
(2)接收机及天线外观应良好,各部件及附件完好;
(3)设备使用手册及后处理软件手册及软盘齐全。
3.2.3通电检验
(1)各信号灯工作正常;
(2)按键和显示系统正常;
(3)接收机锁定卫星时间快慢,接收机信号强弱及信号失锁情况正常。
3.2.4实测检验
在GPS接收机完成了一般检视和通电检验后,又进行了实测检验,经计算符合要求。
3.2.5 用于天线基座的光学对点器在作业过中进行了经常性检验,以确保对中的准确性。
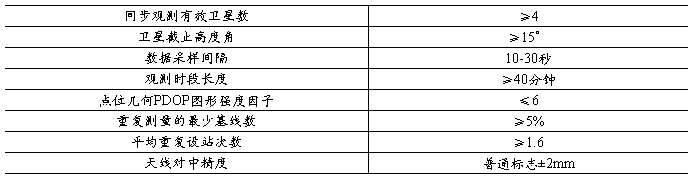
3.3 GPS测量作业的基本技术要求
GPS测量作业的基本技术要求如表3所示。
表3 基本技术要求
3.4 作业过程
3.4.1观测前准备
(1)每天出发前检测电池容量是否充足,并携带备用干电池。仪器及其附
件应携带齐全。
(2)作业前应检测接收机内存是否充足。
3.4.2天线安置:严格对中、整平,对中误差小于2mm。外业记录包括:测量员、点名、点号、观测日期、观测起止时间、天线高等基本要素。
3.4.3观测:同步观测健康卫星数≥4,卫星高度角≥15°,数据采样率为15秒,观测时段长度根据观测精度指示灯的要求确定,当边长≤10公里时,观测精度指示灯闪两下即可,点位几何PDOP图形强度因子≤6。
3.4.4量取仪器高:测前测后分别在个3个方向(每个方向间的夹角为120度)量取仪器高,互差小于3mm。取其中数作为测前测后的仪器高,然后取测前测后的平均值作为最终结果。
3.4.5测站间联系
测站间用对讲机联系,同时开机,接收机开始记录数据后,作业员要经常观察卫星个数、记录情况、电池电量和精度指示灯等,只有各测站精度指示灯都亮并符合要求后;才能结束观测,但时间不能少于40分钟。
4、 GPS基线向量的解算及检核
4.1 GPS基线向量的解算
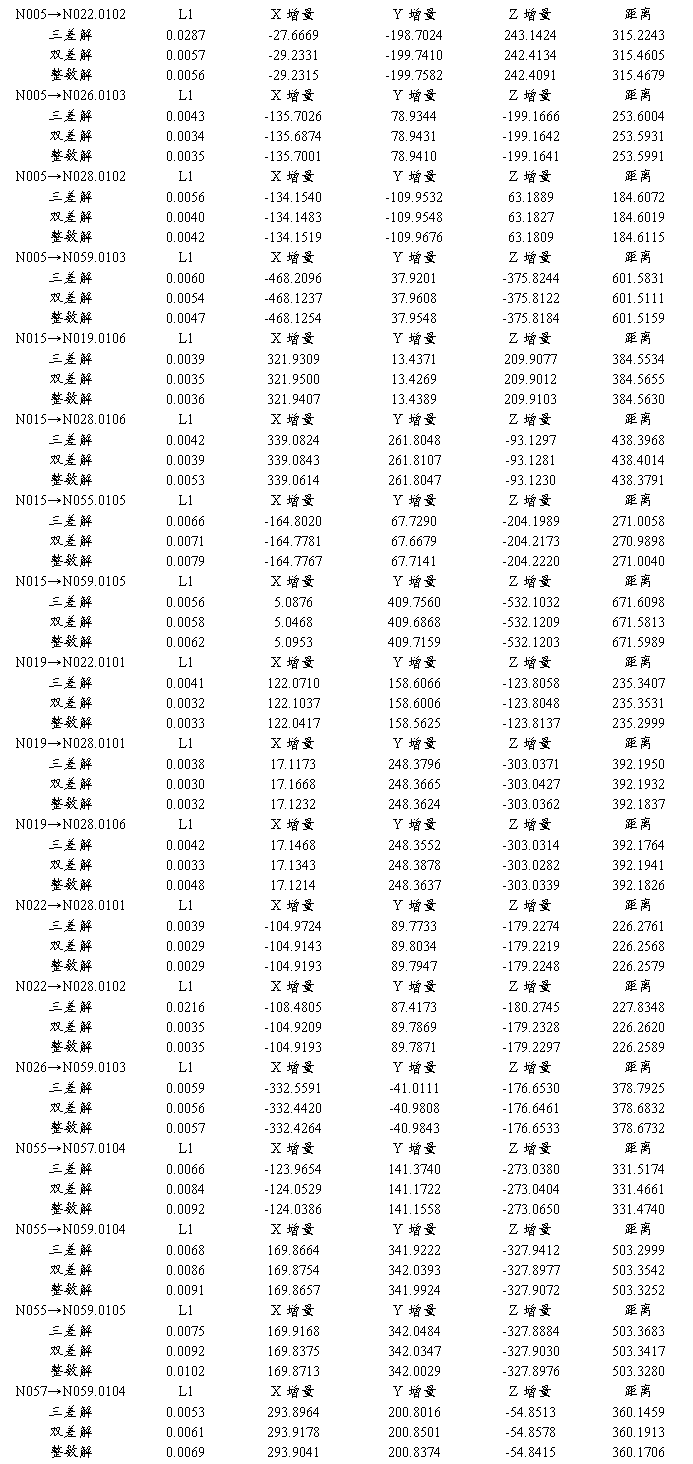
GPS基线向量的计算采用中海达GPS随机软件进行基线解算和数据处理。对当天采集的数据在当天晚上及时地传输到计算机中,并检查外业记录和输入点号、点名、测前和测后的天线高度是否有误。对同步环、异步环(独立边构成的闭合环)、闭合差及复测基线进行检查,以便发现不合格的成果,发现超限时应分析查明原因,根据情况决定淘汰、重测或补测措施。该网各条基线均符合精度要求。
4.1.1基线解算中的起算点坐标为宿迁地方独立坐标系下的GPS E级点。
4.1.2本网采用符合要求的双差固定解作为基线解算的最终结果。
4.1.3基线解算内容包括解求当天时段的所有同步基线,并进行同步环检验工作,以检验外业数据的正确性和可靠性,并进行不同时段间基线的比较,包括异步环检验和复测基线的比较,以检验不同时段间外业数据的一致性,以便检验出基线观测数据中是否存在粗差。
4.1.4同一时段观测值基线处理中,数据的剔除率为10%,《规范》规定其值宜小于10%。 E级网共观测基线18条,无不合格的基线,实际参加平差的为18条。其数据的剔除率为0,优于《规范》要求。
4.2精度统计
全网基线解算后,计算出同步环、异步环和复测基线闭合差及其限差。
4.2.1同步环闭合差
共生成6个同步环,各环闭合差如表4所示:
表4 同步环闭合差

由上表可知:同步环闭合差在0-5mm之间的有5个,占同步环总数的83.33%;在6-9mm之间的有1个,占同步环总数的16.67%;由同步环检核可知:同步环闭合差最大的为5.7mm,其相对精度为0.0057/1233.7882=1/216454;最小1mm,较好的为1mm,相对精度为0.001/1194.9698=1/1194970;远小于限差要求。说明在该网的GPS基线向量中,相位观测值不含有明显的周跳。
4.2.2异步环闭合差
共统计异步环1个,各环闭合差如表5所示:
表5 异步环闭合差

由上表可知:异步环闭合差在0-6 mm之间的有1个,占同步环总数的100%;
4 .2.3复测基线闭合差
复测基线闭合差最大的为15.33mm,其相对误差为15.23ppm,最小的为3.208mm,其相对误差为4.09ppm。说明复测基线的质量是可靠的。
由以上统计数据知,GPS测量控制网外业观测数据质量较好。
5、GPS网的平差处理
5.1无约束平差
为全面考察GPS网的内部符合精度,首先进行无约束平差,以符合各项质量检验要求的独立基线组成的闭合图形和三维基线向量及其相应的方差协方差阵作为观测信息,进行GPS网的无约束平差。
经无约束平差检验,没有明显粗差。
5.2约束平差
5.2.1起算点的选取
由于地方独立坐标系下1个已知点精度较高,故选取这2个已知点作为起算点,作为强制约束的固定值,也可作为加权观测值统一进行二维约束平差。网中7个待定点的坐标和高程已知,平差得到的点的坐标可以与之比较。
平差计算采用随机软件完成。
选取独立基线构成GPS网,进行网的二维约束平差计算。
5.2.2二维约束平差后的统计结果
二维约束平差后的统计结果如下:
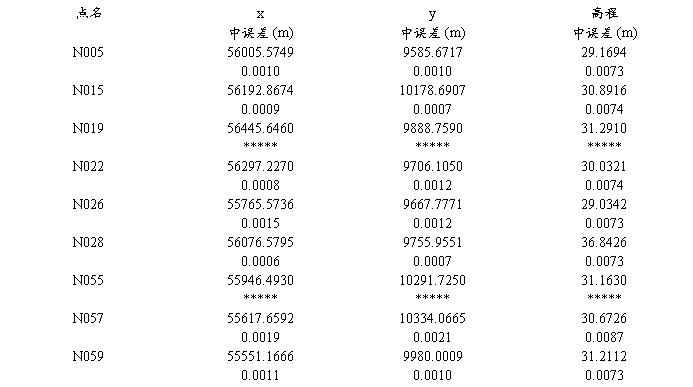
(1)点位精度
表6 点位精度

(2)边长相对精度
边长相对精度如下表所示:
表7 边长相对精度

6、结论
(1)学院GPS网从点位普查、选点、埋石、外业数据采集到数据处理历时7天,其效率是常规方法难以达到的。
(2)学院E级GPS网平均边长0.3705公里,进行二维约束平差后,其最大点位中误差为1.8mm,其最弱边相对中误差为1/115165,远高于E级网的精度要求。
7、提交资料
(1)技术总结。
(2)GPS网布设图。
(3)GPS外业观测记录(测量手簿)。
(4)GPS基线解算成果。
(5)学院GPS网的地方坐标系坐标成果。
第二篇:GPS控制网技术总结
目 录
1 概况... 2
1.1 测区已有控制资料及利用情况... 2
1.2 坐标系统和高程系统... 2
2 GPS控制网的布设... 2
2.1 GPS控制网的布设方案及要求... 2
2.2 选点、埋石... 3
2.3 GPS网的主要指标... 3
3 GPS外业数据采集... 3
3.1 所用仪器... 3
3.2 仪器检验... 4
3.3 GPS测量作业的基本技术要求... 4
3.4 作业过程... 4
4 GPS基线向量的解算及检核... 5
4.1 GPS基线向量的解算... 5
4.2 精度统计... 5
5 GPS网的平差处理... 6
5.1 无约束平差... 6
5.2 约束平差... 6
6 结论... 7
7 提交资料... 7
8 体会... 8
GPS控制网技术总结
1 概况
GPS卫星定位技术是一项多功能、高效、快速、省时和高精度的定位技术,已在国内外测量界得到推广和应用,特别在城市控制测量、工程测量和地籍测量中得到广泛应用。
为了满足我院测绘工程专业学生教学实习和学院建设的需要,在宿迁学院校园内建立了E级GPS控制网,其控制面积为1㎞2。该控制网使用3台高精度的测量型静态中海达8200E 单频GPS接收机进行外业观测。
本控制网利用以前埋设的控制点,由学生完成选点、网的技术设计、外业观测、数据处理工作,前后历时7天,于20##年1月16日前完成全部工作。
1.1 测区已有控制资料及利用情况
(1)已收集到的地形图资料有校园示意图。
(2)控制点资料。
测区内已经搜集到的控制点资料有:地方独立坐标系下的GPS E级点2个。其坐标数据如表1所示:
表1 已知点坐标和高程

1.2 坐标系统和高程系统
测区位于高斯3度投影带第39带,中央子午线经度为117°。平面坐标系采用宿迁地方独立坐标系,投影面为参考椭球体;高程系统采用1985国家高程基准。
2 GPS控制网的布设
2.1 GPS控制网的布设方案及要求
(1)以E级GPS控制网作为学院的首级控制,本GPS控制网以同步环为基本单元,采用边、点混合连接的方式布网,将2个已知点和7个待定点连接成如下网形:(网型附后)
(2)E级GPS控制网的最长边为0.6716km,最短边为0.1846km,平均边长为0.3705km。图形结构较好。本网共布设9个点,其中2个已知点为宿迁地方独立坐标系下的E级GPS点,7个未知点为E级GPS点。
(3)GPS控制网中联测了2个地方独立坐标系下的E级GPS点,以便将GPS定位结果转换至地面坐标系时作为起算数据。
2.2 选点、埋石
在测区范围内共布设了20多个控制点,选择其中9个点作为E级GPS点,在点位选择上主要考虑点位分布合理,密度均匀,而且便于直接使用。根据GPS测量规范要求,首先充分利用原有控制点点位标石;其次点位应选在视野开阔、点位周围高度角大于15度以上天空无障碍物(如树林、高楼、水塔及高程建筑物等)的地方;无强烈反射无线电波的金属或其它障碍物或大范围水面,点位远离强功率电台、电视发射塔、微波中继站、高压变电所等要求。因此,我们将9个GPS点布设在校园内人行道、山坡上等合适的地方,每个点位均做到稳固可靠,便于到达,使用方便,可长期保存。各点均已埋设标石,各GPS点位见网图和点之记。
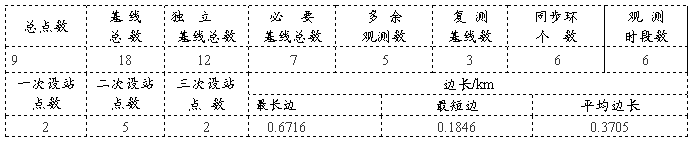
2.3 GPS网的主要指标
E级网共设计9个测点,其中已知点2个,新建GPS点7个。共设计6个时段,设站1次的有2个,设站2次的有5个,设站3次的有2个,重复设站次数为2,大于《规范》规定的≥1.6的要求。网型结构的主要指标见表2。
表2 E级GPS控制网的网型结构的主要指标
3 GPS外业数据采集
3.1 所用仪器
使用3台高精度的测量型静态中海达8200E 单频GPS接收机以静态定位方式进行同步观测。该机具有12个通道、测量相量为L1载波相位,其内存为64MB,采样间隔设为5秒,其水平标称精度:±5mm+1ppm×D,高程标称精度为±10mm+1ppm×D。其中D为所测距离,以km为单位。
3.2 仪器检验
3.2.1 GPS接收机的检视
仪器在使用前,按规程规定的项目,分别按一般检视和实地检验进行了全面检验。
3.2.2 一般检视
(1)接收机及天线型号应正确,主机与配件齐全;
(2)接收机及天线外观应良好,各部件及附件完好;
(3)设备使用手册及后处理软件手册及软盘齐全。
3.2.3 通电检验
(1)各信号灯工作正常;
(2)按键和显示系统正常;
(3)接收机锁定卫星时间快慢,接收机信号强弱及信号失锁情况正常。
3.2.4 实测检验
在GPS接收机完成了一般检视和通电检验后,又进行了实测检验,经计算符合要求。
3.2.5 用于天线基座的光学对点器在作业过中进行了经常性检验,以确保对中的准确性。
3.3 GPS测量作业的基本技术要求
GPS测量作业的基本技术要求如表3所示。
表3 基本技术要求
3.4 作业过程
3.4.1观测前准备
(1)每天出发前检测电池容量是否充足,并携带备用干电池。仪器及其附
件应携带齐全。
(2)作业前应检测接收机内存是否充足。
3.4.2 天线安置:严格对中、整平,对中误差小于2mm。外业记录包括:测量员、点名、点号、观测日期、观测起止时间、天线高等基本要素。
3.4.3 观测:同步观测健康卫星数≥4,卫星高度角≥15°,数据采样率为15秒,观测时段长度根据观测精度指示灯的要求确定,当边长≤10公里时,观测精度指示灯闪两下即可,点位几何PDOP图形强度因子≤6。
3.4.4 量取仪器高:测前测后分别在个3个方向(每个方向间的夹角为120度)量取仪器高,互差小于3mm。取其中数作为测前测后的仪器高,然后取测前测后的平均值作为最终结果。
3.4.5测站间联系
测站间用对讲机联系,同时开机,接收机开始记录数据后,作业员要经常观察卫星个数、记录情况、电池电量和精度指示灯等,只有各测站精度指示灯都亮并符合要求后;才能结束观测,但时间不能少于40分钟。
4 GPS基线向量的解算及检核
4.1 GPS基线向量的解算
GPS基线向量的计算采用中海达GPS随机软件进行基线解算和数据处理。对当天采集的数据在当天晚上及时地传输到计算机中,并检查外业记录和输入点号、点名、测前和测后的天线高度是否有误。对同步环、异步环(独立边构成的闭合环)、闭合差及复测基线进行检查,以便发现不合格的成果,发现超限时应分析查明原因,根据情况决定淘汰、重测或补测措施。该网各条基线均符合精度要求。
4.1.1基线解算中的起算点坐标为宿迁地方独立坐标系下的GPS E级点。
4.1.2本网采用符合要求的双差固定解作为基线解算的最终结果。
4.1.3基线解算内容包括解求当天时段的所有同步基线,并进行同步环检验工作,以检验外业数据的正确性和可靠性,并进行不同时段间基线的比较,包括异步环检验和复测基线的比较,以检验不同时段间外业数据的一致性,以便检验出基线观测数据中是否存在粗差。
4.1.4同一时段观测值基线处理中,数据的剔除率为10%,《规范》规定其值宜小于10%。 E级网共观测基线18条,无不合格的基线,实际参加平差的为18条。其数据的剔除率为0,优于《规范》要求。
4.2 精度统计
全网基线解算后,计算出同步环、异步环和复测基线闭合差及其限差。
4.2.1同步环闭合差
E级网共生成6个同步环,各环闭合差如表4所示:
表4 同步环闭合差

由上表可知:同步环闭合差在0-5mm之间的有5个,占同步环总数的83.33%;在6-9mm之间的有1个,占同步环总数的16.67%;由同步环检核可知:同步环闭合差最大的为5.7mm,其相对精度为0.0057/1233.7882=1/216454;最小1mm,较好的为1mm,相对精度为0.001/1194.9698=1/1194970;远小于限差要求。说明在该网的GPS基线向量中,相位观测值不含有明显的周跳。
4.2.2异步环闭合差
E级网共统计异步环1个,各环闭合差如表5所示:
表5 异步环闭合差

由上表可知:异步环闭合差在0-6 mm之间的有1个,占同步环总数的100%;
4 .2.3复测基线闭合差
E级网复测基线闭合差最大的为15.33mm,其相对误差为15.23ppm,最小的为3.208mm,其相对误差为4.09ppm。说明复测基线的质量是可靠的。
由以上统计数据知,宿迁学院GPS测量控制网外业观测数据质量较好。
5 GPS网的平差处理
5.1 无约束平差
为全面考察GPS网的内部符合精度,首先进行无约束平差,以符合各项质量检验要求的独立基线组成的闭合图形和三维基线向量及其相应的方差协方差阵作为观测信息,进行GPS网的无约束平差。
经无约束平差检验,没有明显粗差。
5.2 约束平差
5.2.1 起算点的选取
由于宿迁地方独立坐标系下2个已知点精度较高,故E级网选取这2个已知点作为起算点,作为强制约束的固定值,也可作为加权观测值统一进行二维约束平差。网中7个待定点的坐标和高程已知,平差得到的点的坐标可以与之比较。
平差计算采用随机软件完成。
选取独立基线构成GPS网,进行网的二维约束平差计算。
5.2.2二维约束平差后的统计结果
二维约束平差后的统计结果如下:
(1)E级网的点位精度
表6 点位精度

由上表可知:E级网的点位精度较好。
(2)边长相对精度
边长相对精度如下表所示:
表7 边长相对精度

6 结论
(1)学院GPS网从点位普查、选点、埋石、外业数据采集到数据处理历时7天,其效率是常规方法难以达到的。
(2)学院E级GPS网平均边长0.3705公里,进行二维约束平差后,其最大点位中误差为1.8mm,其最弱边相对中误差为1/115165,远高于E级网的精度要求。
7 提交资料
(1)技术总结。
(2)GPS网布设图。
(3)GPS外业观测记录(测量手簿)。
(4)GPS基线解算成果。
(5)学院GPS网的地方坐标系坐标成果。
8 体会
在这次实习中,我们学到了不少东西,每次实习都会让我们知道很多书本学不到的知识,让我们跟多了解实践中应该怎么做,如何做,遇到困难如何解决,如何可以做的更好,如何可以更方便快捷的完成任务,我这次制作的是国家E级GPS,我更全面的了解了GPS控制网的制作过程,在实习的过程中,也养成了小组分工和合作的精神,良好的团队精神可以有很大的效率的提高,以及工作的愉悦,可以让人更好的完成任务的质量。通过这次学习,我们学到了很多知识,合作交流的知识和熟悉了GPS的运用。特别是遇到困难时,解决问题的精神。
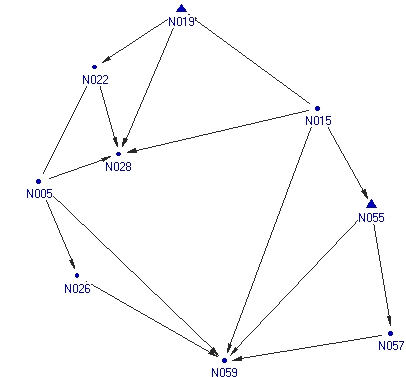
GPS网略图
基线简表
宿迁学院GPS网的地方坐标系坐标成果