DSP短学期课程设计报告
课程名称: DSP芯片应用系统设计
专 业: 电气工程及其自动化
班 级: 10自动化(2)
设 计 者:
学 号:
指导教师:
宁波大学信息科学与工程学院
一、设计目的
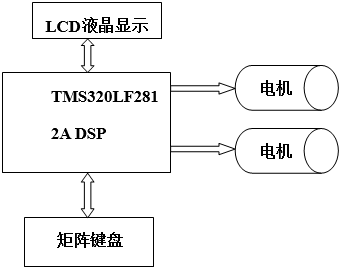
通过矩阵键盘的输入,利用F2812的事件管理模块,可以简单有效的控制步进电机的停转、转速和转向。系统中设计了相应的人机界面,进行相应变量的显示、操作即可在液晶上实时显示电机当前运行状态。利用拓展端口控制外围设备的方法,掌握使用2407DSP通用计时器的控制原理及中断服务程序的编程方法;了解蜂鸣器发生原理和音乐发生方法;了解步进电机的使用方法;了解液晶显示控制原理及编程方法及小键盘的应用。
二、设计任务
该实验设计分成4个模块完成:
• 液晶模块
• 键盘模块
• 电机模块
• 其它模块(蜂鸣器、点阵)
具体化即:
1. DSP芯片接受矩阵键盘的输入。
2. DSP芯片对LED灯,蜂鸣器控制模块。
3. DSP芯片对相应信息的反馈,即:LCD液晶显示。
4. DSP控制电机正反转以及对电机速度调节。
三、系统构成及流程图

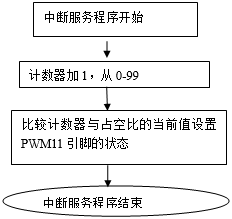
步进电机中断服务程序流程图:

直流电机中断服务程序流程图:
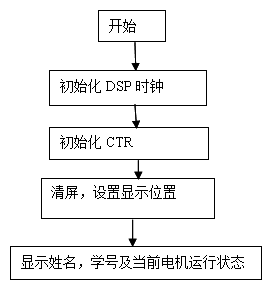
LCD显示流程图:
四、子模块工作原理
(一)液晶显示器控制控制
1、EMIF接口
TMS320F2812DSP的扩展存储器接口(EMIF)与大多数外围设备进行连接,典型应用如连接片外扩展存储器等。这一接口提供地址连线、数据连线和一组控制线。ICETEK-F2812-A将这些扩展线引导了板上的扩展插座上供扩展使用。
2、液晶显示模块的访问、控制
是由2812ADSP对扩展接口的操作完成的。控制口的寻址:命令控制接口的地址为0x108001,数据控制接口的地址为0x108003和0x108004,辅助控制接口的地址为0x108002.
显示控制方法:
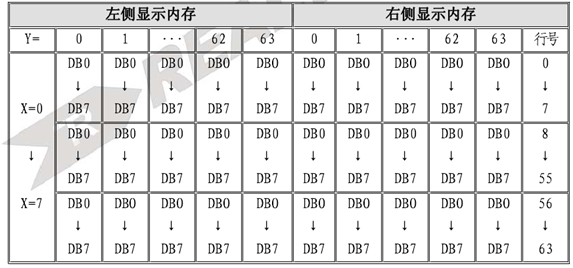
液晶显示模块中有两片缓冲存储器,分别对应屏幕显示的像素,向其中写入数值将改变显示,写入“1”则显示一点,写“0”则不显示。其地址与像素的对应方式如下:
发送控制命令:向液晶显示模块发送控制命令的方法是通过命令控制接口写入控制命令控制字,然后再向辅助控制接口写入0.
写显示数据:在使用命令控制字选择操作位置(页面、列数)之后,可以将待显示的数据写入液晶显示模块的缓存。将数据发送到相应数据控制I/O接口即可。
3、液晶显示器与DSP的链接
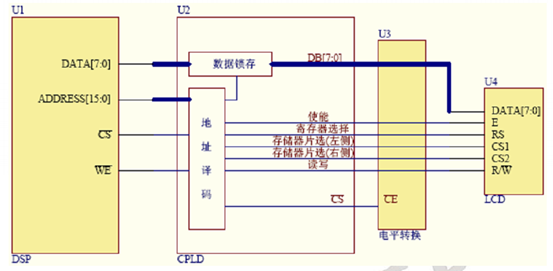
图2 液晶显示器与DSP的链接
(二)键盘输入
键盘输入功能主要提供控制信号和数据的输入。键盘的扫描码由DSP的I/O扩展地址0x8001给出,当有键盘输入时,读此端口得到扫描码,当无键按下时读此端口的结果为0。
各按键的扫描码排列如下所示。
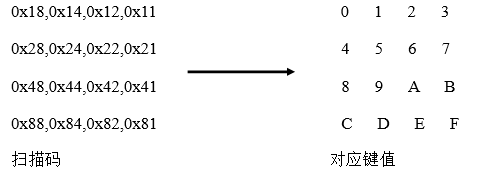
也即,当读8001H端口时,如果其值为‘18H’,则表示键盘按下的键是“0”,如果其值为‘0’,则表示没有键按下。
将键盘扫描得到的数据存入内存,然后根据数据值就能够确定所输入的键,通过映射关系,就能过将每一个键设为特定的功能。读键盘输入值的语句如下:
nScanCode =port8001;
nScanCode &=0x0ff;
(三) 端口在被读一次取以后就将端口值置为0,准备下一个按键的输入。输入的数据保存在nScanCode中,nScanCode同0x0ff与是把nScanCode的高位清零。
(三)步进电机原理
步进电机是由DSP 通用I/O管脚输出直接控制。步进电机的起动频率大于500PPS(拍每秒),空载运行频率大于900PPS。通用I/O口IOPE5控制电机的转动频率,IOPF4 控制转动方向。控制的方法是使用DSP通用定时器设置IOPE5以一定的频率改变高低状态,输出方波,设置IOPF4为高电平则顺时针转动,低电平为逆时针转动。根据上述原理,用通用定时器让IOPE5口输出一定频率的方波,来控制四相的电极的改变,从而带动电机的转动。对IOPF4口操作以控制转向
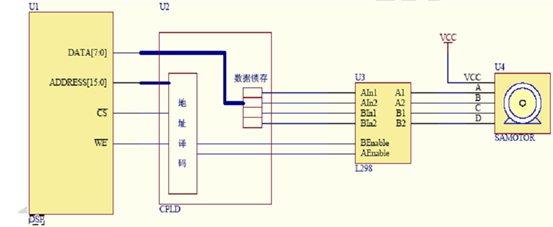
图3 步进电机设计原理图
(四)直流电机原理
控制原理:
当电动机要求正转时,PWM11给出高电平信号,该信号分成3路:第1路接与门Y1的输入端,使与门Y1的输出由pwm决定;第2路直接与开关管V4的栅极相连,使V4导通;第3路经非门F1连接到与门Y2的输入端,使与门Y2输出为0,这样使开关管V3截止;从非门F1输出的另一路与开关管V2的栅极相连,其低电平信号也使V2截止。同样,当电机要求反转时,PWM5给出低电平信号,经过2个与门和1个非门组成的逻辑电路后,使开关管V3受PWM信号控制,V2导通,V1、V4全部截止。
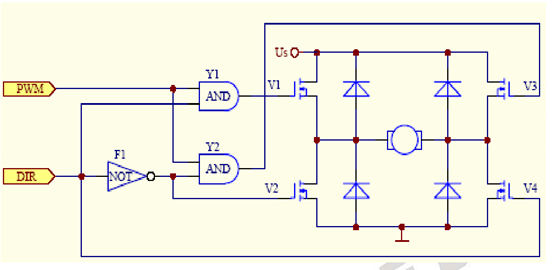
图4 直流电机原理图
五、设计进度安排
7月6日:集中辅导,布置任务
7月6日到7月9日:初步确定设计思路,上交设计报告
7月10日下午:完成键盘输入模块,LED灯及蜂鸣器模块
7月14日上午:完成LCD显示模块
7月15日下午:完成电机速度、转向控制模块以及整个实验测试
7月17日:上交实验报告,接受考核
六、预期结果
当按下‘6’时选择启动步进电机,按‘1’‘2’控制正反转,按下‘3’、‘4’分别加速或减速。按下‘5’时停止。
当按下‘0’时选择启动直流电机,按‘1’‘2’控制正反转,按下‘3’、‘4’分别加速或减速。按下‘5’时停止。
当按下‘7’时选择启动步进电机,直流电机。
七、参考文献
1:《 TMS320LF240x DSP C语言开发应用 》,刘和平主编, 北京航空航天大学出版社
2:《 TMS32LF240X DSP结构、原理及应用 》 ,刘和平主编, 北京航空航天大学出版社
3:DSP应用系统设计实例 郑红等 北京航空航天出版社
4:TMS320LF240x DSP原理及应用开发指南 赵世廉 北京航空航天出版社
5:基于DSP实现的步进电机控制器的设计 田红芳 李颖宏 王欢 中国传动网
6: TMS320LF240x系列DSP原理、开发与应用 张毅刚,赵光权,孙宁,俞洋. 哈尔滨工业大学
7:.DSP技术原理与应用 刘向东 中国电力出版社
第二篇:DSP短学期课程设计报告

DSP短学期课程设计报告
课程名称: 设计题目: 专 业: 班 级: 设 计 者: 学 号: 指导教师: 设计时间:
宁波大学信息科学与工程学院
一、设计目的
二、 设计任务
三、 系统构成及流程图
四、 子模块工作原理
五、 设计进度安排
六、预期结果
七、参考文献