五、坐标系及高程系的选择
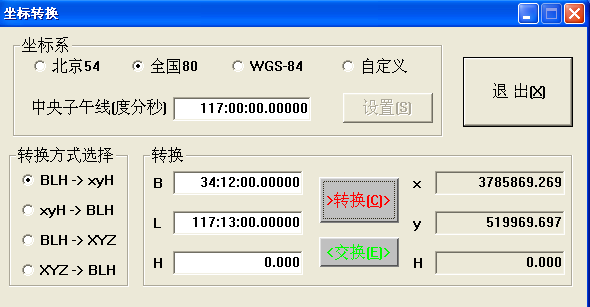
1、因为测区中心的大地坐标已知我们可以利用高斯平面坐标正算的出测区中心的直角坐标,计算用软件实现,过程如下:
再通过给定的测区中心的高程范围可以求得Hm=(30+244)/2=137m
然后可以利用下列式子求得测区中心的综合变形,与±1/40000比较,看是不是要选择独立坐标系。
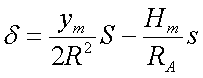
取S=s,R=RA=6371km,Y,H以千米为单位上公式可变为:

通过计算,可以算得综合变形为:-0.000017>-0.000025。所以不用选择独立坐标系。
直接选择中央子午线为117度的高斯平面直角坐标系。
2、由已知条件可知,已知点给出的是1985国家高程基准。所以我也选择85高程系统。
六、现行测量规范:
(1)全球定位系统(GPS)测量规范,GB/T 18314-2009。
(2)全球定位系统城市测量技术规程,CJJ73-97。
(3)工程测量规范,GB50026-2007。
(4)城市测量规范,CJJ8-99。
(5)国家一、二等水准 测量规范,GB12897-91。
(6)国家三、四等水准 测量规范。GB12898-91
(7)《1:500 1:1 000 1:2 000地形图图式》GB/T20257.1-2007;
七、经费预算可参考下列数据:
GPS单频接收机每台1.5万元,双频接收机每台5万元;全站仪每台2万元;DJ2经纬仪每台2万元;DS1水准仪每台8千元,DS3水准仪每台2千元;标石每座100元。
测绘人员每人每天生活补贴费100元。交通、住宿费按每人每天200元计算。
不可预见费按总费用的10%计算。
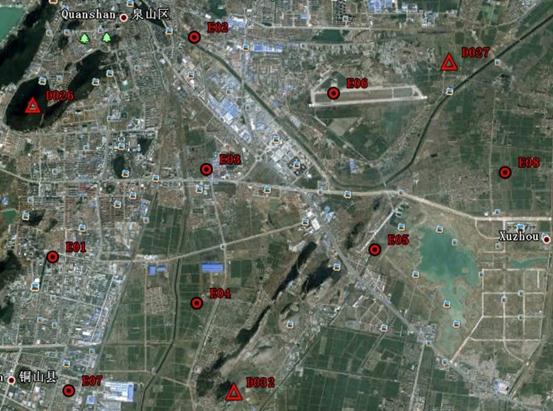
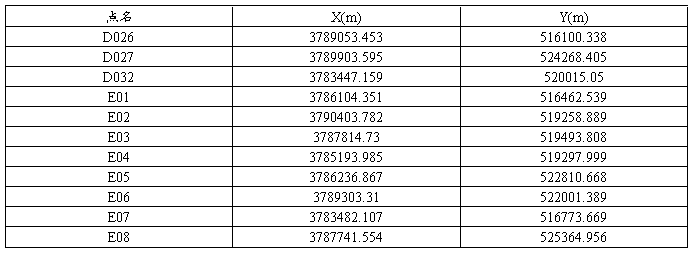
每个点的经纬度及其分布图如下
D026
D027
D032
EO1
E02
E03
E04
E05
E06
E07
E08
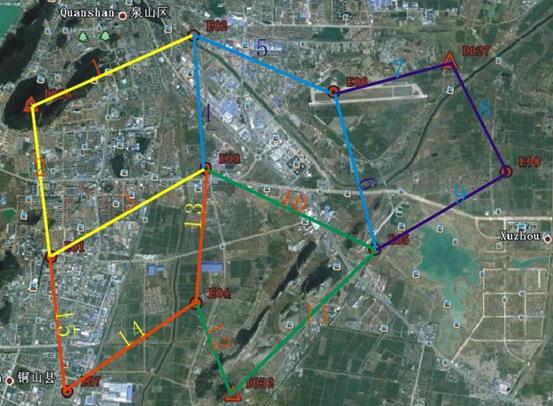
GPS布置网如图(相同颜色为同一时段独立基线):
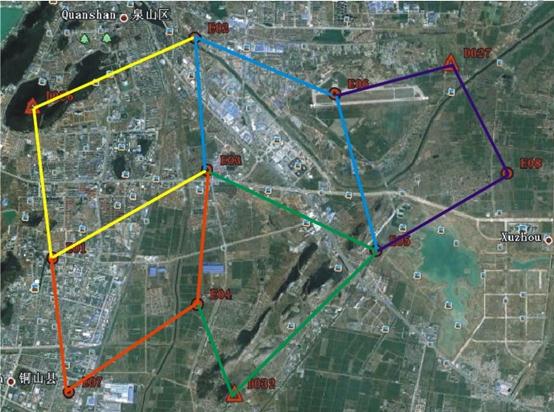
给各基线编流水号(如下):
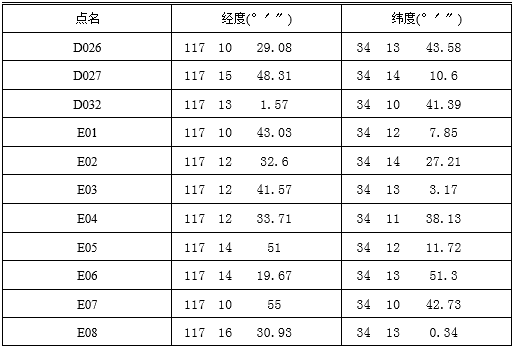
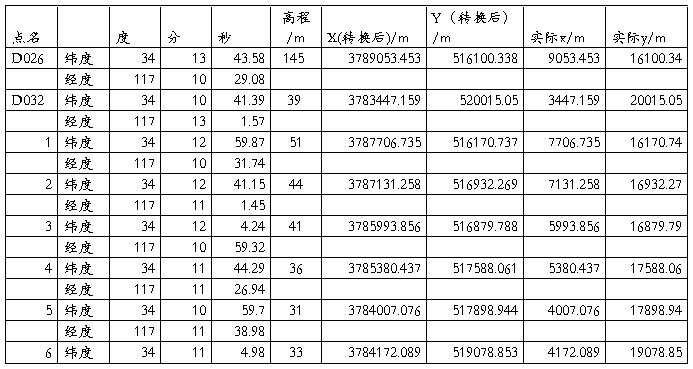
各点近似经纬度(如下表):
再通过坐标转换,可以求出每个点的80坐标:
下面是其中一个由大地坐标转换为高斯平面坐标的示意

国家80平面坐标如下:
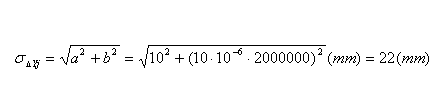
对每条基线进行距离和中误差计算
以2500米作为单位观测误差,所以单位观测中误差为:
按照公式

若第 j 某条基线向量的长度为 2 km,则其ΔX、ΔY的观测值中误差分别为:


通过计算得各点权如下表:

通过matlab软件,通过编写程序得出P阵,B阵,和法矩阵BTPB阵,及Qxx阵。
程序如下:(已知点用99表示)
B=zeros(30,15);
JK=[2,99;1,99;3,1;2,3;2,6;5,6;6,99;8,99;8,5;5,3;5,99;4,99;4,3;7,4;1,7;];
i=1;
while 1
if i==16;
break;
end
j=JK(i,1);k=JK(i,2);
B((i-1)*2+1,(j-1)*2+1)=1;
B((i-1)*2+2,(j-1)*2+2)=1;
if k==99
a=1;
else
B((i-1)*2+1,(k-1)*2+1)=-1;
B((i-1)*2+2,(k-1)*2+2)=-1;
end
i=i+1;
end
P=blkdiag(0.566,0.566,0.738,0.738,0.553,0.553,0.934,0.934,0.744,0.744,0.656,0.656,1.115,1.115,1.054,1.054,0.741,0.741,0.5,0.5,0.437,0.437,1.588,1.588,0.917,0.917,0.704,0.704,0.909,0.909);
BTPB=B'*P*B;
QXX=inv(BTPB);
得出P阵(30×30)如下:
P=blkdiag(0.566,0.566,0.738,0.738,0.553,0.553,0.934,0.934,0.744,0.744,0.656,0.656,1.115,1.115,1.054,1.054,0.741,0.741,0.5,0.5,0.437,0.437,1.588,1.588,0.917,0.917,0.704,0.704,0.909,0.909)
得出B阵(30×16)
0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
-1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0
0 -1 0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 1 0 -1 0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 -1 0 0 0 0 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0 -1 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 -1 0 0 0 0
0 0 0 0 0 0 0 0 1 0 -1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 -1 0 0 0 0
0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 0 -1 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 0 -1 0 0 0 0 0 1
0 0 0 0 -1 0 0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 -1 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 0 -1 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 -1 0 1 0 0 0 0 0 0 0 0
0 0 0 0 0 0 -1 0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 -1 0 0 0 0 0 1 0 0
1 0 0 0 0 0 0 0 0 0 0 0 -1 0 0 0
0 1 0 0 0 0 0 0 0 0 0 0 0 -1 0 0
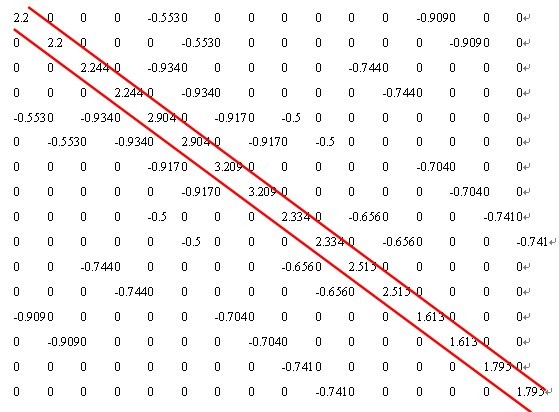
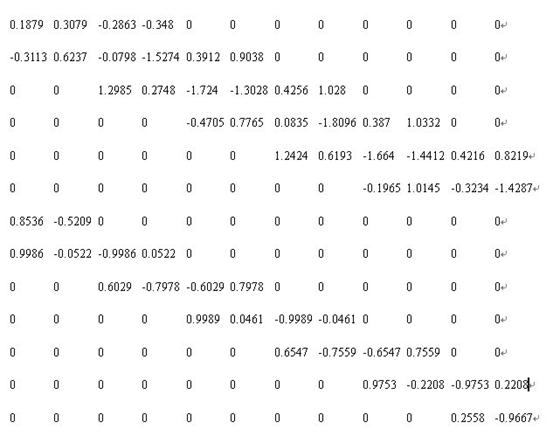
得出BTPB阵(16×16)如下:
得出Qxx阵(16×16)如下:
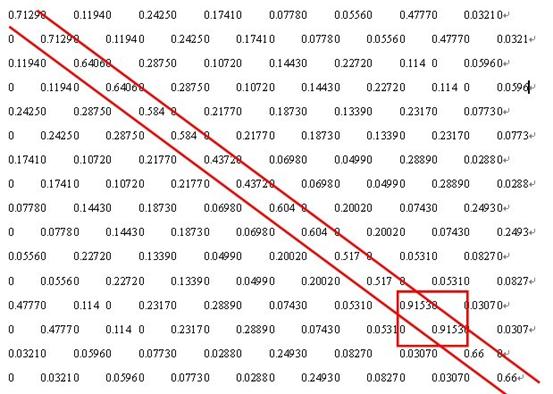
经过观察可以得出:
E07号点为最弱点,其协因数为:
Qxx=0.9153 Qyy=0.9153 Qxy=0
单位权中误差为:

导线网(加密网)设计图如下:

1点
2点
3点
4点
5点
6点
未知点的近似坐标计算:
导线网的权阵
P=blankdiag(1,1,1,1,1,1,1,1,1,1,1,1,1);
Matlab程序如下:
B=zeros(13,6);
JKH=[1,2,-1;2,3,1;3,4,2;4,5,3;5,6,4;6,-2,5]; JK=[1,-1;1,1;3,2;4,3;5,4;6,5;-2,6];
XYJS=[9053.453,16100.338;7706.735,16170.737;7131.258,16932.269;5993.856,16879.788;5380.437,17588.061;4007.076,17898.944;4172.089,19078.853;3447.159,20015.05;];
ro=2062.65;
i=1;
while 1
if i==7;
break;
end
j=JKH(i,1);k=JKH(i,2);h=JKH(i,3);
if j<=0
j=6+abs(j);
end
if k<=0
k=6+abs(k);
end
if h<=0
h=6+abs(h);
end
dxjk=XYJS(k,1)-XYJS(j,1);dyjk=XYJS(k,2)-XYJS(j,2);
dxjh=XYJS(h,1)-XYJS(j,1);dyjh=XYJS(h,2)-XYJS(j,2);
sjk0=dxjk*dxjk+dyjk*dyjk;
sjh0=dxjh*dxjh+dyjh*dyjh;
j=JKH(i,1);k=JKH(i,2);h=JKH(i,3);
if j<=0 & k<=0
A=0;
end
if j<=0 & k>=0
B(i,k*2-1)=-ro*dyjk/sjk0;B(i,k*2)=ro*dxjk/sjk0;
end
if k<=0 & j>=0
B(i,j*2-1)=ro*dyjk/sjk0;B(i,j*2)=-ro*dxjk/sjk0;
end
if k>=0 & j>=0
B(i,j*2-1)=ro*dyjk/sjk0;B(i,j*2)=-ro*dxjk/sjk0;B(i,k*2-1)=-ro*dyjk/sjk0;B(i,k*2)=ro*dxjk/sjk0;
end
if j<=0 & h<=0
A=0;
end
if j<=0 & h>=0
B(i,h*2-1)=ro*dyjh/sjh0;B(i,h*2)=-ro*dxjh/sjh0;
end
if j>=0 & h<=0
B(i,j*2-1)=B(i,j*2-1)-ro*dyjh/sjh0;B(i,j*2)=B(i,j*2)+ro*dxjh/sjh0;
end
if j>=0 & h>=0
B(i,j*2-1)=B(i,j*2-1)-ro*dyjh/sjh0;B(i,j*2)=B(i,j*2)+ro*dxjh/sjh0;B(i,h*2-1)=ro*dyjh/sjh0;B(i,h*2)=-ro*dxjh/sjh0;
end
i=i+1;
end
while 2
if i==14;
break;
end
j=JK(i-6,1);k=JK(i-6,2);
if j<=0
j=6+abs(j);
end
if k<=0
k=6+abs(k);
end
dxjk=XYJS(k,1)-XYJS(j,1);dyjk=XYJS(k,2)-XYJS(j,2);
sjk0=sqrt(dxjk*dxjk+dyjk*dyjk);
j=JK(i-7,1);k=JK(i-7,2);
if j<=0 & k<=0
A=0;
end
if j<=0 & k>=0
B(i,k*2-1)=dxjk/sjk0;B(i,k*2)=dyjk/sjk0;
end
if k<=0 & j>=0
B(i,j*2-1)=-dxjk/sjk0;B(i,j*2)=-dyjk/sjk0;
end
if k>=0 & j>=0
B(i,j*2-1)=-dxjk/sjk0;B(i,j*2)=-dyjk/sjk0;B(i,k*2-1)=dxjk/sjk0;B(i,k*2)=dyjk/sjk0;
end
i=i+1;
end
P=blkdiag(1,1,1,1,1,1,1,1,1,1,1,1,1);
BTPB=B'*P*B;
QXX=inv(BTPB);
得到B阵(13×12)如下:
得到BTPB(12×12)阵如下:
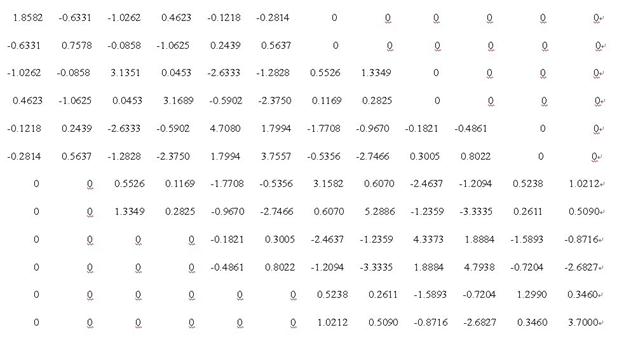
得到Qxx阵(12×12)如下:

通过观察1号点为最弱点。
其协因数为:
Qxx=0.8542 Qyy=2.2491 Qxy=1.3851
单位权中误差为:

3.水准网可布设四等附合或闭合水准网,平均1~2km一个水准点。估算最弱点高程中误差≤2cm。
水准网设计图如下:

水准网精度估计,采用间接平差法,通过matlab编写程序如下:
B=zeros(12,8);
JK=[1,99;2,99;6,2;6,99;8,99;8,5;5,4;4,3;3,1;5,99;7,99;1,7];
i=1;
while 1
if i==13;
break;
end
j=JK(i,1);k=JK(i,2);
B(i,j)=1;
if k==99
a=1;
else
B(i,k)=-1;
end
i=i+1;
end
P=blkdiag(1,1,1,1,1,1,1,1,1,1,1,1);
BTPB=B'*P*B;
QXX=inv(BTPB);
P阵为:
P=blkdiag(1,1,1,1,1,1,1,1,1,1,1,1);
得到B阵(12×8)为:
1 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0
0 -1 0 0 0 1 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1
0 0 0 0 -1 0 0 1
0 0 0 -1 1 0 0 0
0 0 -1 1 0 0 0 0
-1 0 1 0 0 0 0 0
0 0 0 0 1 0 0 0
0 0 0 0 0 0 1 0
1 0 0 0 0 0 -1 0
得到BTPB阵(8×8)为:
3 0 -1 0 0 0 -1 0
0 2 0 0 0 -1 0 0
-1 0 2 -1 0 0 0 0
0 0 -1 2 -1 0 0 0
0 0 0 -1 3 0 0 -1
0 -1 0 0 0 2 0 0
-1 0 0 0 0 0 2 0
0 0 0 0 -1 0 0 2
得到Qxx阵(8×8)为:
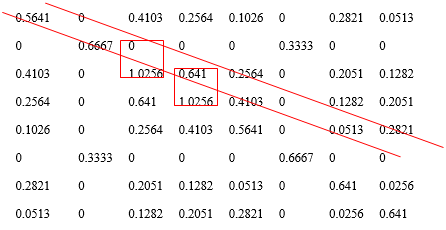
通过观察3、4号点为最弱点。
其协因数为:
Qxx=1.0256
单位权中误差为: