大地测量实习报告

学 院: 信息工程学院
专 业: 测绘工程
班级组号: 115111班第6小组
学生姓名:
学 号: 20111003169
指导教师:
中国地质大学(武汉)
20##年 6月 至 20##年 7月
目录
一、实习概况.................................2
1.1 实习目的.................................2
1.2 实习任务.................................2
1.3 实习安排.................................3
1.4 测区概况.................................3
二、二等水准测量.............................4
2.1 实地选点.................................4
2.2 仪器i角检测.............................5
2.3 作业依据.................................6
2.4 仪器使用与观测记录.......................6
2.5 二等水准测量内业计算及成果...............7
三、四等平面控制测量.........................9
3.1 作业依据.................................9
3.2 测量操作步骤.............................10
3.3 导线测量的内业计算.......................10
3.4 外业成果表格 ............................12
四、实习心得体会 ............................13
一、实习概况
1.1实习目的
控制测量学是研究精确测定和描绘地面控制点空间位置及其变化的学科。它的服务对象主要是各种工程建设、城镇建设和土地规划与管理等行业。所以控制测量的实习非常重要。
本次实习的目的主要是训练同学们等级控制测量的操作能力,使同学们对等级控制测量的全过程有一个完整的认识,做到会测、会进行数据处理及平差计算。在实习中培养我们严格认真的态度、踏实求实的工作作风、吃苦耐劳的精神和团结协作的观念,为今后参加工作打下基础。
1.2实习任务
1、二等高程控制测量:完成一个大闭合环和一个小闭合环的二等高程控制测量。水准测量两闭合路线至少应有一个个公共点相连。
2、四等平面控制测量:使用2″级全站仪在由在三个已知点之间布设导线,完成四等平面控制测量。
1.3实习安排
1、实习分组:
实习分组按5人一组,实行组长负责制。
2、使用仪器:
高程控制测量实习:电子水准仪1台套,精密铟钢水准尺1对,尺垫1对,皮尺1个。
平面控制测量实习:2″级全站仪1台套,棱镜2个,三脚架3架,记录板1个。
1.4时间安排
20##年6月16日~25日二等水准测量实习
20##年6月26日~7月5日平面控制实习
20##年7月16日~7月31日 数据处理及实习报告撰写
1.5测区概况
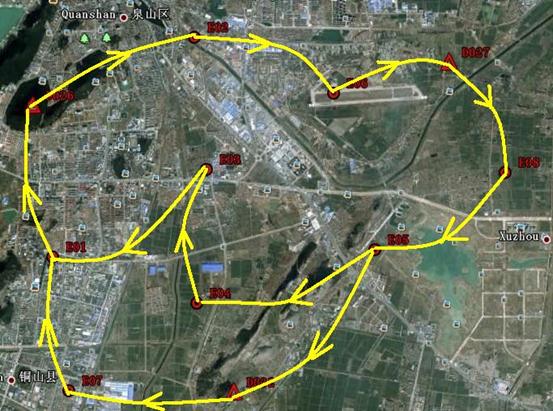
(1)水准测量路线,路线经过中国地质大学(武汉)西区校园南望山脚下到西二门鲁磨路,经鲁磨路向北至八一路延长线,绕北区经南望山至起始点。另一水准路线从鲁磨路绕庙山形成闭合路线。测区在校园及北区路口来往人口较多,在山上坡度较大以及在八一路处的桥上过往车流量大,有的部分地势起伏较大,植被覆盖面积大的山上,给测量带来一定困难。在其他地方均便于测量。
(2)平面控制测量测区即水准测量中的位于庙山的小圆。
测量路线图如图(1):
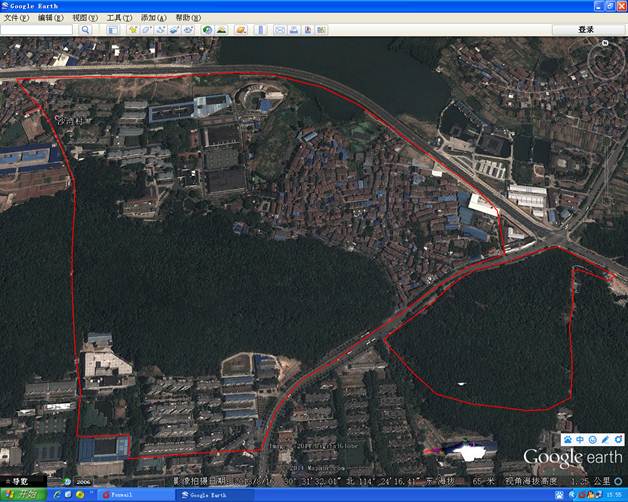
图(1)
二、二等水准测量
2.1实地选点
实习第一天由老师带领实地勘探测量路线,并选择控制点。
导线选点注意事项:
(1)导线点选在土质坚硬、稳定的地方,以便于保存点的标志和安置仪器。
(2)导线点选在地势较高,视野开阔的地方,以刞于进行碎部测量或加密以及施工放样。
(3)导线各边的长度应按规范规定尽是接近平均边长,且不同导线各边长不应相差过大。导线点的数量要足够,以便控制整修测区。
(4)相邻导线间要通视。
(5)所选的导线间必须满足超越(或远离)障碍物1.3米以上。
(6)路线平面控制点的位置应沿路线布设,距路中心的位置大于50M且小于300M,同时应便于测角、测距、及地形测量和定线放样。
(7)在桥梁和隧道处,应考虑桥隧布设控制网的要求,在大型构造物的两侧应分别布设一对平面控制点。
2.2 i角检验
选择较平坦宽阔的地方,选定适当距离(约取30m)的两点A、B,并用尺垫确定不动。在 A、B 两跟标尺中间安置数字水准仪,如图(2)。
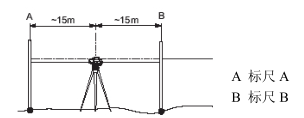
图2
首先进入“调整”程序,选择调整子菜单,第一步: 瞄准标尺 A 按测量键;第二步: 瞄准标尺 B 按测量键;把仪器移到距标尺A约3米的地方。如图(3)
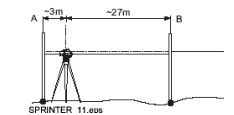
图(3)
第三步: 瞄准标尺B按测量键;第四步: 瞄准标尺A按测量键。屏幕上显示新的视准轴误差,按回车键,确认新的视准轴误差。在校正测量过程中,若出现“无效测量”的警告信息,就反复测量,直至达到要求为止,然后按回车键确认测量成果。经上述步骤后我们小组测得的i角大小为-12.6″,符合要求。
2.3 作业依据
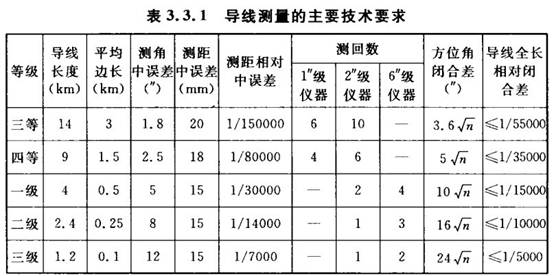
本次控制测量实习的技术要求按《城市测量规范》中有关规定执行。本次实习按二等水准测量精度要求,观测方法按《规范》第3·3·3条执行。水准测量有关限差见下表
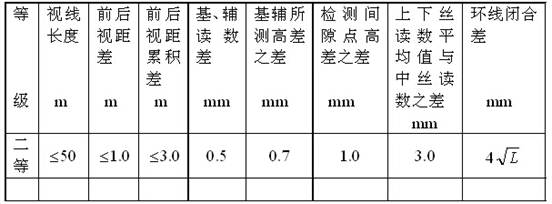
注L为环线长,以km为单位
2.4 仪器使用与观测记录
水准仪的使用包括仪器的安置、粗略整平、精平、瞄准水准尺和读数等操作步骤。由于我们使用的是自动安平水准仪,所以操作中不再包含精平步骤。
观测记录:往测时,奇数测站照准水准标尺分划的顺序为:后前前后,往测时,偶数测站照准水准标尺分划的顺序为:前后后前,返测时,奇、偶数测站照准标尺的顺序分别与往测偶、奇数测站相同。
测结果的重测和取舍:观观测结果超限必须进行重测,测站观测限差超限必须立即重测,否则从水准点或间隙点起重测,测段往返测高差较差超限必须重测,重测后应选用往返合格的成果。如重测结果与原测结果分别比较,较差均不超过限差时,取三次结果的平均值。观测过程中,下丝读数距地面不足30cm,重新架站观测。由于观测错误而返测时,两个控制点之间的所有设站都必须重新测量,并进行往返测。
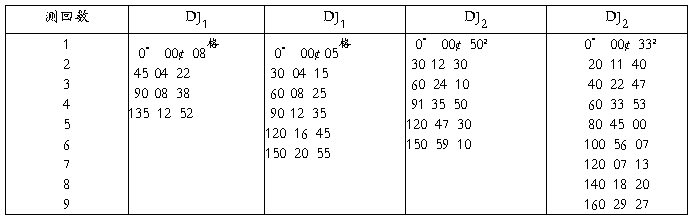
2.5二等水准测量内业计算
由水准仪直接导出数据,经过计算,我们小组,大圈往测闭合差-5.4mm,大圈反测闭合差4.0mm。根据规定,二等水准环线闭合差限差为 ,大圈的环线闭合限差为8mm,符合要求。小圈往测闭合差2.5mm,小圈反测闭合差-2.8mm,而小圈的环线闭合限差为6mm,符合要求。水准路线简图如下图(4)所示,我们设1号点高程为0.0000m。
,大圈的环线闭合限差为8mm,符合要求。小圈往测闭合差2.5mm,小圈反测闭合差-2.8mm,而小圈的环线闭合限差为6mm,符合要求。水准路线简图如下图(4)所示,我们设1号点高程为0.0000m。
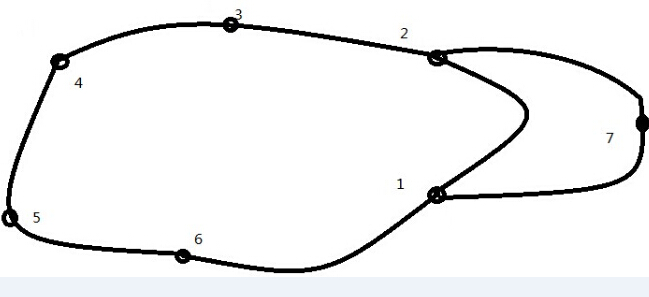
图4
各点平差高程为:
1号点:0.0000
2号点:-22.8605
3号点:-22.4677
4号点:-4.3345
5号点:21.0862
6号点:-7.9457
7号点:-1.9211 单位(m)
三、四等平面控制测量
3.1 作业依据
本次控制测量实习的技术要求按《城市测量规范》中有关规定执行。具体限差如下表所示。
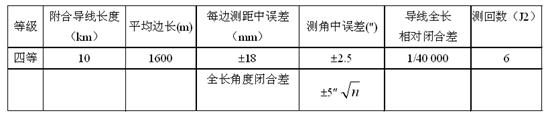
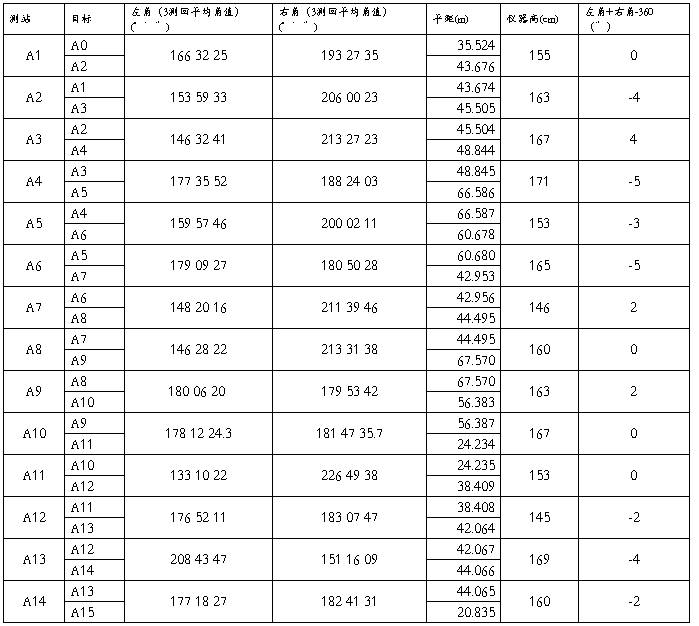
四等以上导线水平角的观测,应在观测总测回中以奇数测回和偶数测回分别观测导线前进方向的左角和右脚。
采用左、右角观测法,各观测3个测回,左角(奇数测回)和右角(偶数测回)分别取中数,按 °计算,△≤±5.0″。观测右角时仍按左角起始方向为准变换度盘位置。
°计算,△≤±5.0″。观测右角时仍按左角起始方向为准变换度盘位置。
用DJ1、DJ2级仪器方向观测度盘位置配符
3.2 测量操作步骤
在合适的地点布设导线点,进行埋桩,并标注明显记号,架设仪器,在控制点A、C上立好棱镜。进行对中、整平。在控制点A、C之间的控制点B点安置脚架,架设全站仪,并进行整平对中。进行观测,在起始导线点上安置全站仪,在相邻两点安置棱镜。观测水平角及距离,水平角需要观测6个测回。观测所得的数据应同步按要求记录于手簿上。核对完各个限差合格后,即可搬站。若不达标,则要仔细检查,进行必要的重测。
3.3 导线测量的内业计算
(1)首先由导线起始端的两控制点坐标,得到控制点A0与控制点A1组成的边的方位角:

再根据象限判断 (即若
(即若 ,则加上180°,若
,则加上180°,若 且
且 ,则加上360°)。
,则加上360°)。
(2)计算下一条边的方位角

(3)计算前视点的坐标
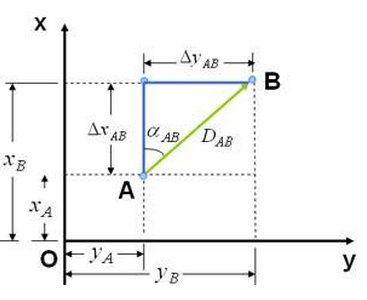
由方位角α前及边长D, 计算坐标增量 、
、 :
:


由坐标增量、,计算x、y:

重复(2)、(3)步的计算,得到途径控制点的坐标以及终点的坐标。与测得的终点坐标进行比对检查。
3.4 外业成果表格
四、实习心得
这次实习的收获首先是熟悉了水准仪、全站仪的用途,熟练了水准仪、全站仪的各种使用方法,掌握了仪器的检验和校正方法。同时我们也在实习中把所学知识进行了巩固和复习,将理论和实践相结合,学到了许多测量的实际能力,也学到了小组之间的团结、默契,更锻炼了自己很多测绘的能力。为以后的工作积累了初步经验。
其次,在实际测量对数据的检查和矫正的过程中,更好的理解了各种测量误差的来源的成因,其主要有三个方面:仪器误差,仪器本身所决定,属客观误差来源;观测误差,由于人员的技术水平而造成,属于主观误差来源;外界影响误差,受到如温度、大气折射等外界因素的影响而这些因素又时时处于变动中而难以控制,属于可变动误差来源。这样更好了解了如何避免测量结果错误,最大限度的减少测量误差的方法。
更重要的是实际实践掌握了科学的测量方法,在测量中遵循一定的测量原则,如:“从整体到局部”、“先控制后碎部”、“由高级到低级”的工作原则,并做到“步步有检核”。这样做不但可以防止误差的积累,及时发现错误,更可以提高测量的效率及精确度。通过实践,真正学到了很多实实在在的东西,比如对测量仪器的操作、整平,对中更加熟练,学会了控制测量课堂上无法学到且做到的东西。
这次的实习我学会了二等精密水准仪的使用和检校方法,学会了精密水准网的布设和施测方法,了解了精密水准测量的国标要求,了解了社会上测绘行业中的限差要求。复习和巩固了水准网闭合差计算、以及水准网平差计算。学会了精密角度的测量方法、四等导线测量的记录方法,复习和巩固了水平角闭合差计算和角度平差方法。更加熟练的掌握了全站仪的使用方法和数据的输入与输出方法;学会了四等导线的布设与施测方法,强化了导线的计算与平差计算。
这次控制测量实习不仅是对动手能力的一次提升,更是对理论知识的一次综合性的巩固。让我们深深的体会到了“理论指导实践,实践促进理论的发展”这个道理。总的来说,这次实习,让我们体验了测绘外业的艰辛和内业的严谨;掌握了控制测量的各项知识和注意事项;明白了团结合作的重要性,提前领略了目前的测绘行业市场,学会了如何吃苦耐劳。通过实习,我学到了很多知识,最重要的一点,我真正坚定了未来从事测绘事业的信念。由此,我也更加对未来充满了希望。
实习最大的意义,就在于给我们一个实际操作的机会,让我们在实习的过程中从遇到及发现问题进而思考问题,最终解决问题。加深自己对专业知识技能的掌握和理解,强化我们面对问题、解决问题的方法和应变能力。在这个过程中积累许多实际操作的经验,为我们以后的工作提前做好了一定的准备,给我们打下了工作的基础。
实习的过程中难免遇到各种问题,在此感谢老师们的辛勤指导及劳累与奔波,衷心的感谢您们的付出。所以我会更努力的学习专业知识,加强专业技能。最后献上对老师们诚挚的祝福!
第二篇:大地测量实习报告(主要步骤)

五、坐标系及高程系的选择
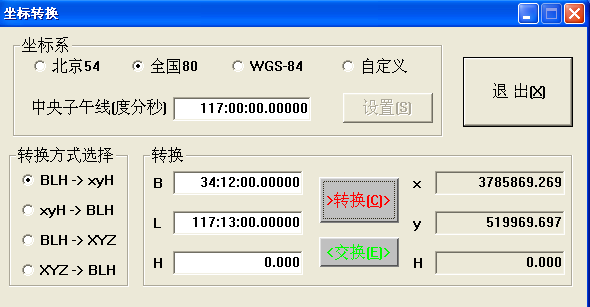
1、因为测区中心的大地坐标已知我们可以利用高斯平面坐标正算的出测区中心的直角坐标,计算用软件实现,过程如下:
再通过给定的测区中心的高程范围可以求得Hm=(30+244)/2=137m
然后可以利用下列式子求得测区中心的综合变形,与±1/40000比较,看是不是要选择独立坐标系。
取S=s,R=RA=6371km,Y,H以千米为单位上公式可变为:

通过计算,可以算得综合变形为:-0.000017>-0.000025。所以不用选择独立坐标系。
直接选择中央子午线为117度的高斯平面直角坐标系。
2、由已知条件可知,已知点给出的是1985国家高程基准。所以我也选择85高程系统。
六、现行测量规范:
(1)全球定位系统(GPS)测量规范,GB/T 18314-2009。
(2)全球定位系统城市测量技术规程,CJJ73-97。
(3)工程测量规范,GB50026-2007。
(4)城市测量规范,CJJ8-99。
(5)国家一、二等水准 测量规范,GB12897-91。
(6)国家三、四等水准 测量规范。GB12898-91
(7)《1:500 1:1 000 1:2 000地形图图式》GB/T20257.1-2007;
七、经费预算可参考下列数据:
GPS单频接收机每台1.5万元,双频接收机每台5万元;全站仪每台2万元;DJ2经纬仪每台2万元;DS1水准仪每台8千元,DS3水准仪每台2千元;标石每座100元。
测绘人员每人每天生活补贴费100元。交通、住宿费按每人每天200元计算。
不可预见费按总费用的10%计算。
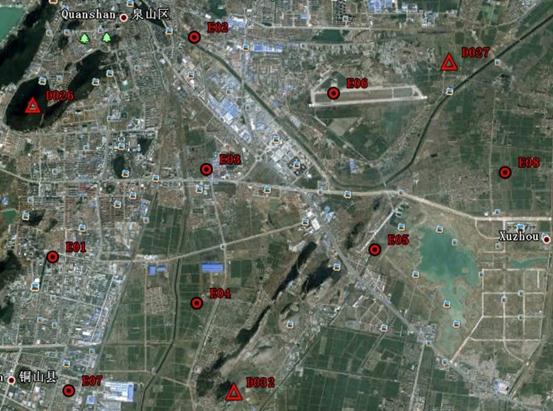
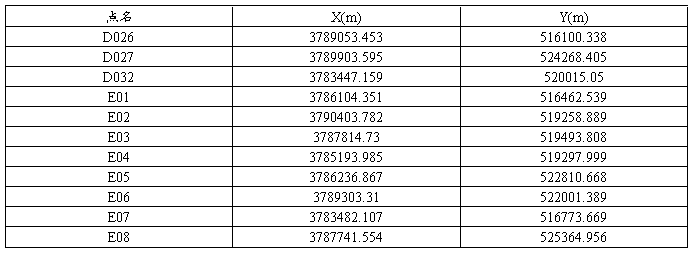
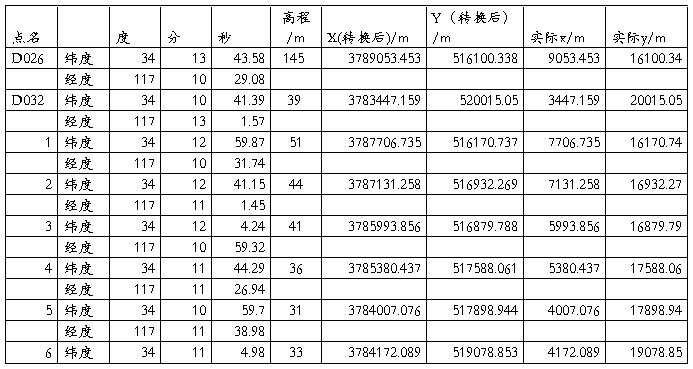
每个点的经纬度及其分布图如下
D026 D027
D027
D032
EO1
E02
E03
E04
E05
E06
E07
E08
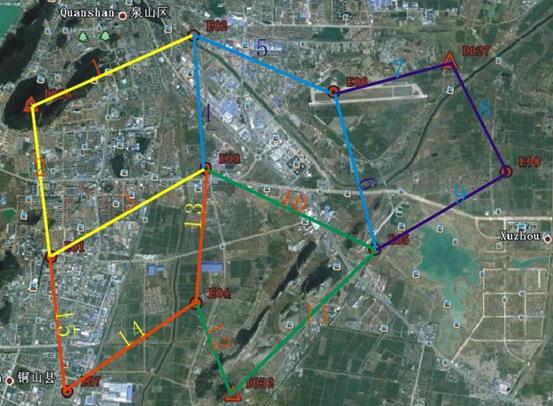
GPS布置网如图(相同颜色为同一时段独立基线):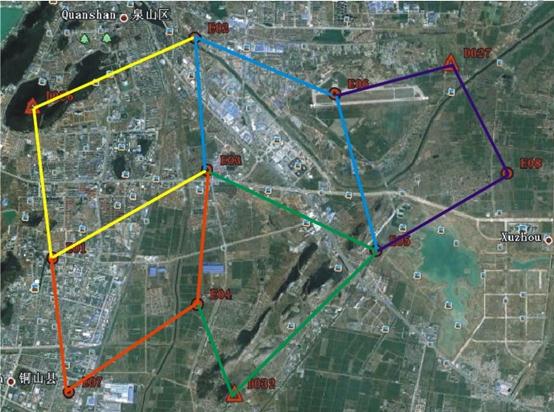
给各基线编流水号(如下):
各点近似经纬度(如下表):

再通过坐标转换,可以求出每个点的80坐标:
下面是其中一个由大地坐标转换为高斯平面坐标的示意

国家80平面坐标如下:
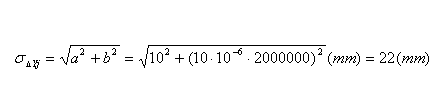
对每条基线进行距离和中误差计算
以2500米作为单位观测误差,所以单位观测中误差为:
按照公式

若第 j 某条基线向量的长度为 2 km,则其ΔX、ΔY的观测值中误差分别为:


通过计算得各点权如下表:

通过matlab软件,通过编写程序得出P阵,B阵,和法矩阵BTPB阵,及Qxx阵。
程序如下:(已知点用99表示)
B=zeros(30,15);
JK=[2,99;1,99;3,1;2,3;2,6;5,6;6,99;8,99;8,5;5,3;5,99;4,99;4,3;7,4;1,7;];
i=1;
while 1
if i==16;
break;
end
j=JK(i,1);k=JK(i,2);
B((i-1)*2+1,(j-1)*2+1)=1;
B((i-1)*2+2,(j-1)*2+2)=1;
if k==99
a=1;
else
B((i-1)*2+1,(k-1)*2+1)=-1;
B((i-1)*2+2,(k-1)*2+2)=-1;
end
i=i+1;
end
P=blkdiag(0.566,0.566,0.738,0.738,0.553,0.553,0.934,0.934,0.744,0.744,0.656,0.656,1.115,1.115,1.054,1.054,0.741,0.741,0.5,0.5,0.437,0.437,1.588,1.588,0.917,0.917,0.704,0.704,0.909,0.909);
BTPB=B'*P*B;
QXX=inv(BTPB);
得出P阵(30×30)如下:
P=blkdiag(0.566,0.566,0.738,0.738,0.553,0.553,0.934,0.934,0.744,0.744,0.656,0.656,1.115,1.115,1.054,1.054,0.741,0.741,0.5,0.5,0.437,0.437,1.588,1.588,0.917,0.917,0.704,0.704,0.909,0.909)
得出B阵(30×16)
0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
-1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0
0 -1 0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 1 0 -1 0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 -1 0 0 0 0 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0 -1 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 -1 0 0 0 0
0 0 0 0 0 0 0 0 1 0 -1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 -1 0 0 0 0
0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 0 -1 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 0 -1 0 0 0 0 0 1
0 0 0 0 -1 0 0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 -1 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 0 -1 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 -1 0 1 0 0 0 0 0 0 0 0
0 0 0 0 0 0 -1 0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 -1 0 0 0 0 0 1 0 0
1 0 0 0 0 0 0 0 0 0 0 0 -1 0 0 0
0 1 0 0 0 0 0 0 0 0 0 0 0 -1 0 0
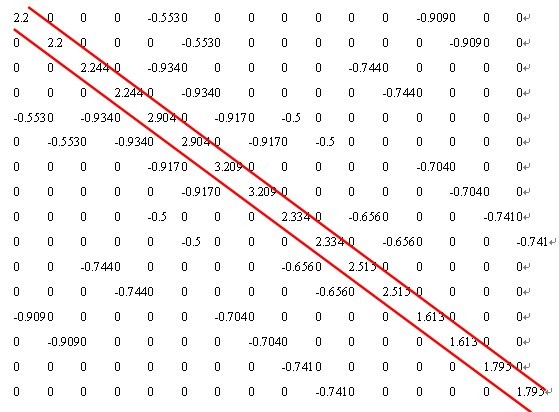
得出BTPB阵(16×16)如下:
得出Qxx阵(16×16)如下:
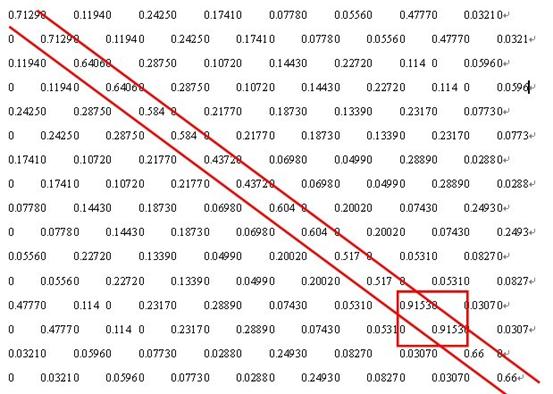
经过观察可以得出:
E07号点为最弱点,其协因数为:
Qxx=0.9153 Qyy=0.9153 Qxy=0
单位权中误差为:

导线网(加密网)设计图如下:






















1点
2点
3点
4点
5点
6点
未知点的近似坐标计算:
导线网的权阵
P=blankdiag(1,1,1,1,1,1,1,1,1,1,1,1,1);
Matlab程序如下:
B=zeros(13,6);
JKH=[1,2,-1;2,3,1;3,4,2;4,5,3;5,6,4;6,-2,5]; JK=[1,-1;1,1;3,2;4,3;5,4;6,5;-2,6];
XYJS=[9053.453,16100.338;7706.735,16170.737;7131.258,16932.269;5993.856,16879.788;5380.437,17588.061;4007.076,17898.944;4172.089,19078.853;3447.159,20015.05;];
ro=2062.65;
i=1;
while 1
if i==7;
break;
end
j=JKH(i,1);k=JKH(i,2);h=JKH(i,3);
if j<=0
j=6+abs(j);
end
if k<=0
k=6+abs(k);
end
if h<=0
h=6+abs(h);
end
dxjk=XYJS(k,1)-XYJS(j,1);dyjk=XYJS(k,2)-XYJS(j,2);
dxjh=XYJS(h,1)-XYJS(j,1);dyjh=XYJS(h,2)-XYJS(j,2);
sjk0=dxjk*dxjk+dyjk*dyjk;
sjh0=dxjh*dxjh+dyjh*dyjh;
j=JKH(i,1);k=JKH(i,2);h=JKH(i,3);
if j<=0 & k<=0
A=0;
end
if j<=0 & k>=0
B(i,k*2-1)=-ro*dyjk/sjk0;B(i,k*2)=ro*dxjk/sjk0;
end
if k<=0 & j>=0
B(i,j*2-1)=ro*dyjk/sjk0;B(i,j*2)=-ro*dxjk/sjk0;
end
if k>=0 & j>=0
B(i,j*2-1)=ro*dyjk/sjk0;B(i,j*2)=-ro*dxjk/sjk0;B(i,k*2-1)=-ro*dyjk/sjk0;B(i,k*2)=ro*dxjk/sjk0;
end
if j<=0 & h<=0
A=0;
end
if j<=0 & h>=0
B(i,h*2-1)=ro*dyjh/sjh0;B(i,h*2)=-ro*dxjh/sjh0;
end
if j>=0 & h<=0
B(i,j*2-1)=B(i,j*2-1)-ro*dyjh/sjh0;B(i,j*2)=B(i,j*2)+ro*dxjh/sjh0;
end
if j>=0 & h>=0
B(i,j*2-1)=B(i,j*2-1)-ro*dyjh/sjh0;B(i,j*2)=B(i,j*2)+ro*dxjh/sjh0;B(i,h*2-1)=ro*dyjh/sjh0;B(i,h*2)=-ro*dxjh/sjh0;
end
i=i+1;
end
while 2
if i==14;
break;
end
j=JK(i-6,1);k=JK(i-6,2);
if j<=0
j=6+abs(j);
end
if k<=0
k=6+abs(k);
end
dxjk=XYJS(k,1)-XYJS(j,1);dyjk=XYJS(k,2)-XYJS(j,2);
sjk0=sqrt(dxjk*dxjk+dyjk*dyjk);
j=JK(i-7,1);k=JK(i-7,2);
if j<=0 & k<=0
A=0;
end
if j<=0 & k>=0
B(i,k*2-1)=dxjk/sjk0;B(i,k*2)=dyjk/sjk0;
end
if k<=0 & j>=0
B(i,j*2-1)=-dxjk/sjk0;B(i,j*2)=-dyjk/sjk0;
end
if k>=0 & j>=0
B(i,j*2-1)=-dxjk/sjk0;B(i,j*2)=-dyjk/sjk0;B(i,k*2-1)=dxjk/sjk0;B(i,k*2)=dyjk/sjk0;
end
i=i+1;
end
P=blkdiag(1,1,1,1,1,1,1,1,1,1,1,1,1);
BTPB=B'*P*B;
QXX=inv(BTPB);
得到B阵(13×12)如下:
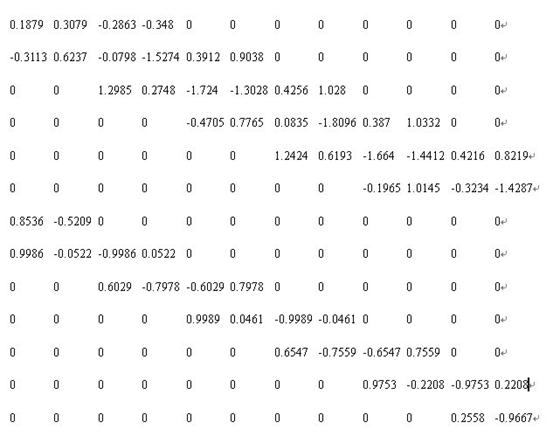
得到BTPB(12×12)阵如下:
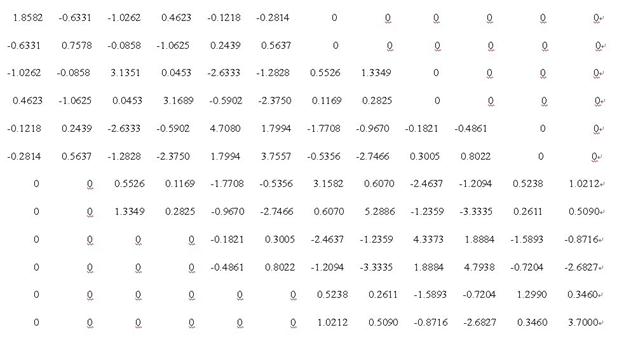
得到Qxx阵(12×12)如下:
 通过观察1号点为最弱点。
通过观察1号点为最弱点。
其协因数为:
Qxx=0.8542 Qyy=2.2491 Qxy=1.3851
单位权中误差为:

3.水准网可布设四等附合或闭合水准网,平均1~2km一个水准点。估算最弱点高程中误差≤2cm。
水准网设计图如下:












水准网精度估计,采用间接平差法,通过matlab编写程序如下:
B=zeros(12,8);
JK=[1,99;2,99;6,2;6,99;8,99;8,5;5,4;4,3;3,1;5,99;7,99;1,7];
i=1;
while 1
if i==13;
break;
end
j=JK(i,1);k=JK(i,2);
B(i,j)=1;
if k==99
a=1;
else
B(i,k)=-1;
end
i=i+1;
end
P=blkdiag(1,1,1,1,1,1,1,1,1,1,1,1);
BTPB=B'*P*B;
QXX=inv(BTPB);
P阵为:
P=blkdiag(1,1,1,1,1,1,1,1,1,1,1,1);
得到B阵(12×8)为:
1 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0
0 -1 0 0 0 1 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1
0 0 0 0 -1 0 0 1
0 0 0 -1 1 0 0 0
0 0 -1 1 0 0 0 0
-1 0 1 0 0 0 0 0
0 0 0 0 1 0 0 0
0 0 0 0 0 0 1 0
1 0 0 0 0 0 -1 0
得到BTPB阵(8×8)为:
3 0 -1 0 0 0 -1 0
0 2 0 0 0 -1 0 0
-1 0 2 -1 0 0 0 0
0 0 -1 2 -1 0 0 0
0 0 0 -1 3 0 0 -1
0 -1 0 0 0 2 0 0
-1 0 0 0 0 0 2 0
0 0 0 0 -1 0 0 2
得到Qxx阵(8×8)为:
 0.5641 0 0.4103 0.2564 0.1026 0 0.2821 0.0513
0.5641 0 0.4103 0.2564 0.1026 0 0.2821 0.0513
 0 0.6667 0 0 0 0.3333 0 0
0 0.6667 0 0 0 0.3333 0 0
 0.4103 0 1.0256 0.641 0.2564 0 0.2051 0.1282
0.4103 0 1.0256 0.641 0.2564 0 0.2051 0.1282
0.2564 0 0.641 1.0256 0.4103 0 0.1282 0.2051
0.1026 0 0.2564 0.4103 0.5641 0 0.0513 0.2821
0 0.3333 0 0 0 0.6667 0 0
0.2821 0 0.2051 0.1282 0.0513 0 0.641 0.0256
0.0513 0 0.1282 0.2051 0.2821 0 0.0256 0.641
通过观察3、4号点为最弱点。
其协因数为:
Qxx=1.0256
单位权中误差为:
