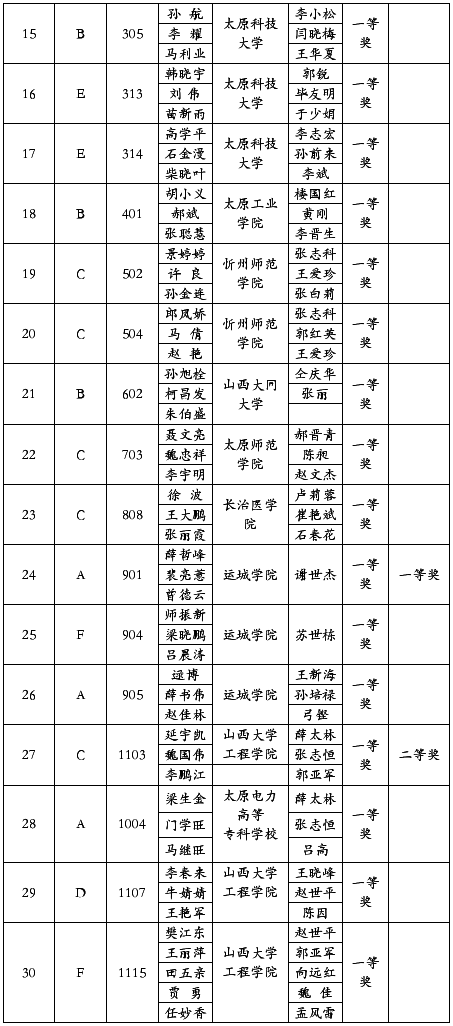
20##年全国大学生数学建模竞赛山西赛区获奖名单
高教社杯获得者
专科组:李 伟、张旭萍、任 何(山西工程职业技术学院)
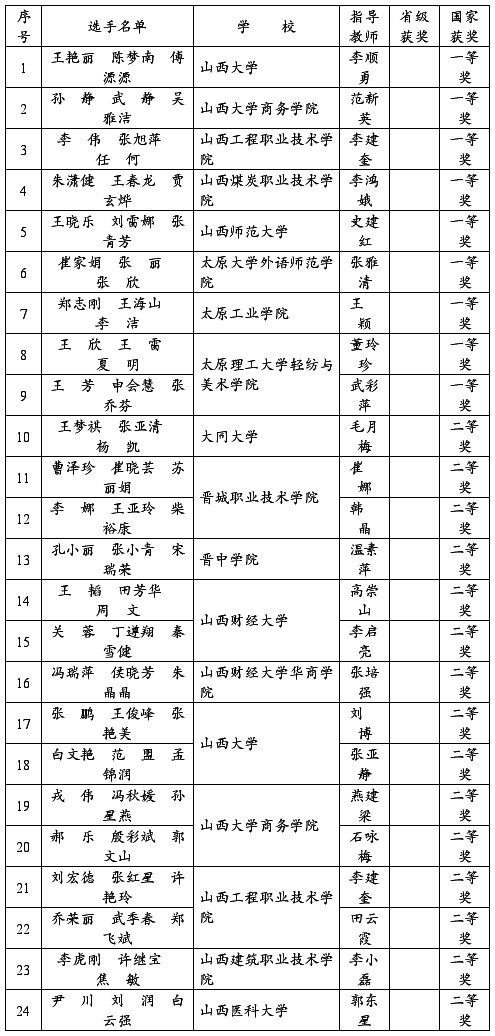
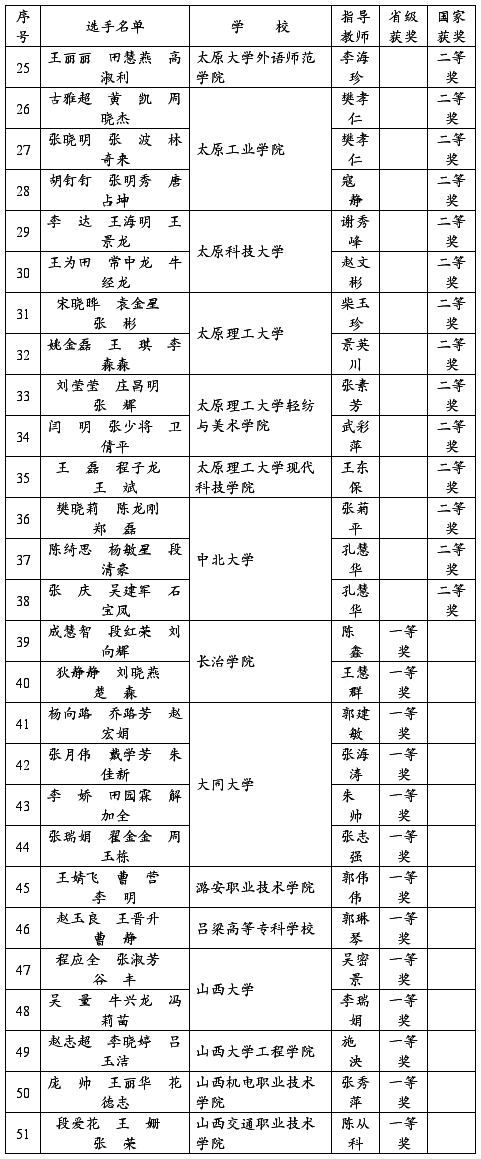
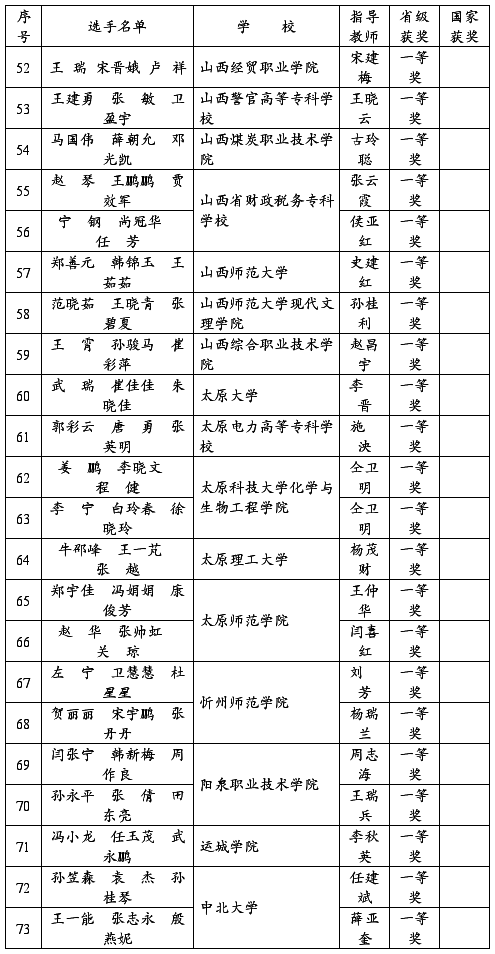
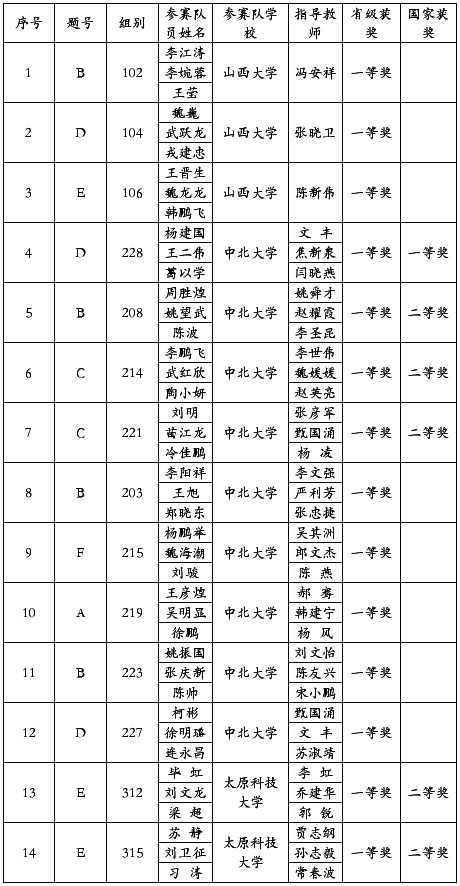
20##年全国大学生电子设计竞赛山西赛区获奖情况
一、本科组
二、高职高专组

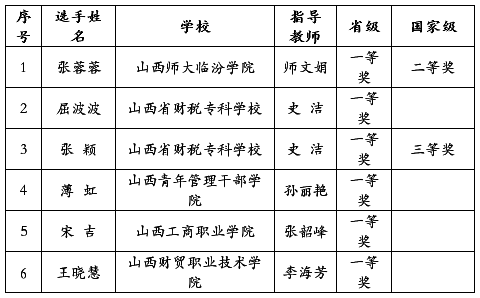
20##年“第六届全国高职高专实用英语口语大赛
山西赛区复赛暨山西省高职高专第七届英语口语比赛”
选手获奖情况汇总表
第二篇:20xx年全国大学生电子设计竞赛模板
20xx年全国大学生电子设计竞赛
电动消防车(A题)
【本科组】
20xx年8月3日

摘 要
本次设计的电动消防车,采用AT89S52作为小车的检测和控制核心。根据题目设定的行进轨迹及具体要求,采用激光管与光敏二极管进行导向行走, 采用火焰传感器模块实现火源的探测及小车的导向;采用L298驱动减速电机给机器人提供驱动力,实现稳定运作。此外,由蜂鸣器给出指示信号。最后,车行驶中的各种功能控制由软件实现。本次设计基于完备的软硬件系统,很好的实现了消防车自动循迹、自动判断、自动报警、自动灭火,功能运行并发出指示信息等功能。
关键词:AT89S52 激光管 火焰传感器 L298
Abstract
The design of the electric fire engines, AT89S52 as the detection and control of the core of the car. Road track set by the subject and the specific requirements of the laser tube and the photodiode-oriented walking,The flame sensor module for the detection of the fire source and the car-oriented; L298 drive geared motors driving force to the robot to achieve stable operation. In addition, the indication given by the buzzer. Finally, the various functions in the car driving is controlled by the software. The design is based on a complete hardware and software system, a good fire engines and automatic tracking, automatic judgment, automatic alarm, automatic fire-fighting functions to run and to issue instructions, and other functions.
Keywords: AT89S52 laser tube, the flame sensor L298
I
目 录
1系统方案........................................................................................................................................ 1
1.1 XXXX的论证与选择 ........................................................................................................ 1
1.2 XXXX的论证与选择 ........................................................................................................ 2
1.3 控制系统的论证与选择 .................................................................................................... 2
2系统理论分析与计算 .................................................................................................................... 2
2.1 XXXX的分析 ................................................................................................................. 2
2.1.1 XXX ......................................................................................................................... 2
2.1.2 XXX ......................................................................................................................... 2
2.1.3 XXX ......................................................................................................................... 2
2.2 XXXX的计算 .................................................................................................................... 2
2.2.1 XXX ......................................................................................................................... 2
2.2.2 XXX ......................................................................................................................... 2
2.2.3 XXX ......................................................................................................................... 2
2.3 XXXX的计算 .................................................................................................................... 2
2.3.1 XXX ......................................................................................................................... 2
2.3.2 XXX ......................................................................................................................... 2
2.3.3 XXX ......................................................................................................................... 3
3电路与程序设计 ............................................................................................................................ 3
3.1电路的设计 ......................................................................................................................... 3
3.1.1系统总体框图 .......................................................................................................... 3
3.1.2 XXXX子系统框图与电路原理图 ......................................................................... 3
3.1.3 XXXX子系统框图与电路原理图 ......................................................................... 3
3.1.4电源 .......................................................................................................................... 3
3.2程序的设计 ......................................................................................................................... 3
3.2.1程序功能描述与设计思路 ...................................................................................... 3
3.2.2程序流程图 .............................................................................................................. 3
4测试方案与测试结果 .................................................................................................................... 4
4.1测试方案 ............................................................................................................................. 4
4.2 测试条件与仪器 ................................................................................................................ 4
4.3 测试结果及分析 ................................................................................................................ 4
4.3.1测试结果(数据) ....................................................................................................... 4
4.3.2测试分析与结论 ...................................................................................................... 5
附录1:电路原理图 ........................................................................................................................ 6
附录2:源程序 ................................................................................................................................ 7
II
电动消防车(A题)
【本科组】
1系统方案
本系统主要由轨迹探测模块、避障模块、火源探测模块、电源模块组成,下面分别论证这几个模块的选择。
1.1 轨迹探测模块的论证与选择
方案一:适用简易光电传感器结合外围电路探测。
由于所采用光电传感器效果并不理想,对行驶过程中的稳定性要求很高,且误测几率较大、易受光线环境的路面介质影响。在使用过程中极易出现问题,而且容易因为该部件造成整个系统的不稳定。故最终没有采用该方案。
方案二:利用两只光电开关。
分别置于轨道的两侧,根据其接受到白线的先后来控制小车转向来调整车向,但测试表明,如果两只光电开关之间的距离很小,则约束了速度,如果着重于小车速度的提升,则随着车速的提升,则势必要求两只光电开关之间的距离加大,从而使得小车的行驶路线脱离轨道幅度较大,小车将无法快速完成准确的导向从而有可能导致寻迹失败。
方案三:用三只光电开关。
一只置于轨道中间,两只置于轨道外侧,当小车脱离轨道时,即当置于中间的一只光电开关脱离轨道时,等待外面任一只检测到黑线后,做出相应的转向调 整,直到 中间的光电开关重新检测到黑线(即回到轨道)再恢复正向行驶。现场实测表明,虽然小车在寻迹过程中有一定的左右摇摆(因为所购小车的内部综合以上三种方案,选择方案三。
循迹功能的电路图如图1所示:
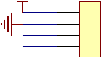

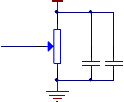
图1 循迹功能的电路图
1
1.2避障模块的论证与选择
考虑到再测障过程中小车车速及反映调向速度的限制,小车在距障碍物20CM内做出反映,这样在顺利绕过障碍物的同时还为下一步驶入车库寻找到最佳的位置和方向。否则,如果范围过大,则可能产生障碍物的判断失误;范围过小又很容易造成车身撞上障碍物。
方案一:超声波测距模块。
超声波测距模块,测量范围在0.1-2M,测量
方案二:XXX。XXXX
方案三:XXX。XXXX
综合以上三种方案,选择方案三。
1.3 控制系统的论证与选择
方案一:XXX。XXXX
方案二:XXX。XXXX
综合考虑采用XXXXX。
1.3 控制系统的论证与选择
方案一:XXX。XXXX
方案二:XXX。XXXX
综合考虑采用XXXXX。
2系统理论分析与计算
2.1 XXXX的分析
2.1.1 XXX
XXXX
2.1.2 XXX
XXXX
2.1.3 XXX
XXXX
2.2 XXXX的计算
2.2.1 XXX
XXXX
2.2.2 XXX
XXXX
2.2.3 XXX
XXXX
2.3 XXXX的计算
2.3.1 XXX
XXXX
2.3.2 XXX
XXXX
2
2.3.3 XXX
XXXX
3电路与程序设计
3.1电路的设计
3.1.1系统总体框图
系统总体框图如图X所示,XXXXXX
图X 系统总体框图
3.1.2 XXXX子系统框图与电路原理图
1、XXXX子系统框图
图X XXXX子系统框图
2、XXXXX子系统电路
图X XXXX子系统电路
3.1.3 XXXX子系统框图与电路原理图
1、XXXX子系统框图
图X XXXX子系统框图
2、XXXXX子系统电路
图X XXXX子系统电路
3.1.4电源 电源由变压部分、滤波部分、稳压部分组成。为整个系统提供5V或者12V电压,确保电路的正常稳定工作。这部分电路比较简单,都采用三端稳压管实现,故不作详述。
3.2程序的设计
3.2.1程序功能描述与设计思路
1、程序功能描述
根据题目要求软件部分主要实现键盘的设置和显示。
1)键盘实现功能:设置频率值、频段、电压值以及设置输出信号类型。
2)显示部分:显示电压值、频段、步进值、信号类型、频率。
2、程序设计思路
3.2.2程序流程图
1、主程序流程图
3
2、XXX子程序流程图
3、XXX子程序流程图
4、XXX子程序流程图
4测试方案与测试结果
4.1测试方案
1、硬件测试
2、软件仿真测试
3、硬件软件联调
4.2 测试条件与仪器
测试条件:检查多次,仿真电路和硬件电路必须与系统原理图完全相同,并且检查无误,硬件电路保证无虚焊。
测试仪器:高精度的数字毫伏表,模拟示波器,数字示波器,数字万用表,指针式万用表。
4.3 测试结果及分析
4.3.1测试结果(数据)
4
4.3.2测试分析与结论
根据上述测试数据,XXXXXXXXXXXXXXXXXXXXXXXXXXXXX,由此可以得出以下结论:
1、
2、
3、
综上所述,本设计达到设计要求。
5

附录1:电路原理图
6
附录2:源程序
7