过程控制实验
姓名:高鹏
班级:09自动化
学号:0953505028
实验项目
实验一、单容水箱对象特性的了解和了解调整位式调节器、智测试
实验二、单回路控制系统的参数整定
实验三、串级控制系统的参数整定
实验装置简介
《过程控制》课程实验的试验装置是用《THKGK-1型过程控制实验装置》。本实验装置的控制信号及被控信号均采用IEC标准,即电压0~5V或1~5V,电流0~10mA或4~20mA。实验系统供电要求为单相交流220V±10%,10A。
实验装置包括被控对象、调节器、执行器模块和变送器模块。
被控对象包括上水箱、下水箱、复合加热水箱以及管道。
调节器主要有模拟调节器(含比例P调节、比例积分PI调节、比例微分PD调节、比例积分微分PID调节)、计算机控制等。
执行器模块主要有磁力驱动泵。
变送器模块主要有流量变送器(FT)、液位变送器(LT1,LT2)等。变送器的零位、增益可调,并均以标准信号DC0-5V输出。
实验一、单容水箱对象特性的了解和了解调整位式调节器、智测试
一、实验目的
1、了解单容水箱的自衡特性。
2、掌握单容水箱的数学模型及其阶跃响应曲线。
二、实验设备
1、THKGK-1型过程控制实验装置:
GK-02 GK-03 GK-04 GK-07
2、万用表一只
3、计算机及上位机软件
三、实验原理
阶跃响应测试法是被控对象在开环运行状况下,待工况稳定后,通过调节器手动改变对象的输入信号(阶跃信号)。同时,记录对象的输出数据和阶跃响应曲线,然后根据给定对象模型的结构形式,对实验数据进行合理的处理,确定模型中的相关参数。
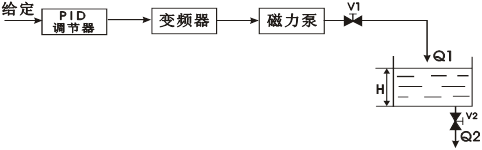
单容水箱液位开环控制结构图如图所示:
四、实验内容与步骤
1、了解并熟悉实验装置的结构与组成。
2、按照图实验原理中的控制结结构框图,完成系统的接线,并把PID调节器的“手动/自动”开关置于“手动”位置,此时系统处于开环状态。
3、打开阀3,出水口阀6打在一定的开度。
4、将单片机控制挂箱GK-03的输入信号端“LT1”与GK-02的传感器输出端“LT1”相连;用配套RS232通讯线 将GK-03的“串行通信口”与计算机的COM1连接;打开所有电源开关用单片机进行液位实时监测;然后用上位机控制监控软件对液位进行监视并记录过程曲线。
5、利用PID调节器的手动旋钮调节输出,将被控参数液位控制在4cm左右。
6、观察系统的被调量——水箱的水位是否趋于平衡状态。若已平衡,记录此时调节器手动输出值VO 以及水箱水位的高度h1和显示仪表LT1的读数值并填入下表。

7、迅速增调“手动调节”电位器,使PID的输出突加10%,利用上位机监控软件记下由此引起的阶跃响应的过程曲线,并根据所得曲线填写下表。

等到进入新的平衡状态后,再记录测量数据,并填入下表:

8、将“手动调节”电位器回调到步骤5)前的位置,再用秒表和数字表记录由此引起的阶跃响应过程参数与曲线。填入下表:

8、重复上述实验步骤。

稳定

五、注意事项
1、做本实验过程中,阀3和阀6不得任意改变开度大小;
2、阶跃信号不能取得太大,以免影响系统正常运行;但也不能过小,以防止对象特性的不真实性。一般阶跃信号取正常输入信号的5%~15%。
3、在输入阶跃信号前,过程必须处于平衡状态
4、在老师的帮助下,启动计算机系统和单片机控制屏。
六、实验报告要求
作出一阶环节的阶跃响应曲线。
实验二、单回路控制系统的参数整定
一、实验目的
1、通过实验熟悉单回路反馈控制系统的组成和工作原理。
2、研究系统分别用P、PI和PID调节器时的阶跃响应。
3、研究系统分别用P、PI和PID调节器时的抗扰动作用。
4、定性地分析P、PI和PID调节器的参数变化对系统性能的影响。
二、实验设备
1、THKGK-1型过程控制实验装置:
GK-02、 GK-03、 GK-04、 GK-07(2台)
2、万用表一只
3、计算机系统
三、实验原理
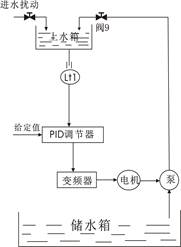 图为一个单容水箱单回路反馈液位控制系统,它的控制任务是使水箱液位等于给定值所要求的高度;并减小或消除来自系统内部或外部扰动的影响。单回路控制系统由于结构简单、投资省、操作方便、且能满足一般生产过程的要求,故它在过程控制中得到广泛地应用。
图为一个单容水箱单回路反馈液位控制系统,它的控制任务是使水箱液位等于给定值所要求的高度;并减小或消除来自系统内部或外部扰动的影响。单回路控制系统由于结构简单、投资省、操作方便、且能满足一般生产过程的要求,故它在过程控制中得到广泛地应用。
当 一个单回路系统设计安装就绪之后,控制质量的好坏与控制器参数的选择有着很大的关系。合适的控制参数,可以带来满意的控制效果。反之,控制器参数选择得不合适,则会导致控制质量变坏,甚至会使系统不能正常工作。因此,当一个单回路系统组成以后,如何整定好控制器的参数是一个很重要的实际问题。 一个控制系统设计好以后,系统的投运和参 单容液位控制系统结构图
数整定是十分重要的工作。
四、 验内容与步骤
1、比例(P)调节器控制
1)、按控制结构图所示,将系统接成单回路反馈系统。其中被控对象是上水箱,被控制量是该水箱的液位高度h1。
2)、启动工艺流程并开启相关的仪器,调整传感器输出的零点与增益。
3)、在老师的指导下,接通单片机控制屏,并启动计算机监控系统,为记录过渡过程曲线作好准备。
4)、在开环状态下,利用调节器的手动操作开关把被控制量“手动”调到等于给定值(一般把液位高度控制在水箱高度的50%点处)。
5)、观察计算机显示屏上的曲线,待被调参数基本达到给定值后,即可将调节器切换到纯比例自动工作状态(积分时间常数设置于最大,积分、微分作用的开关都处于“关”的位置,比例度设置于某一中间值,“正-反”开关拔到“反”的位置,调节器的“手动”开关拨到“自动”位置),让系统投入闭环运行。
6)、待系统稳定后,对系统加扰动信号(在纯比例的基础上加扰动,一般可通过改变设定值实现)。记录曲线在经过几次波动稳定下来后,系统有稳态误差,并记录余差大小。
7)、减小k或增大k,重复步骤6,观察过渡过程曲线。
8)、选择合适的k值就可以得到比较满意的过程控制曲线。
9)、注意:每当做完一次试验后,必须待系统稳定后再做另一次试验。
2、比例积分调节器(PI)控制
1)、在比例调节实验的基础上,加入积分作用。
2)、改变PI调节器的积分时间常数值Ti,然后观察加阶跃扰动后被调量的输出波形。
3)选择合适的k和Ti值,使系统对阶跃输入扰动的输出响应为一条较满意的过渡过程曲线。此曲线可通过改变设定值(如设定值由50%变为60%)来获得。
3、比例积分微分调节(PID)控制
1)、在PI调节器控制实验的基础上,再引入适量的微分作用,即把D打开。然后加上与前面实验幅值完全相等的扰动,记录系统被控制量响应的动态曲线,并与实验步骤(二)所得的曲线相比较,由此可看到微分D对系统性能的影响。
2)、选择合适的k、Ti和Td,使系统的输出响应为一条较满意的过渡过程曲线(阶跃输入可由给定值从50%突变至60%来实现)。
3)、观察计算机记录实验时所有的过渡过程实时曲线。
五、实验数据
1)手动调节被调参数基本稳定

2)加P(比例)作用

稳定后:

3)加D(微分)作用
稳定时:

微分作用

六、实验报告要求
1、绘制单容水箱液位控制系统的方块图。
2、做出阶跃响应曲线
3、定性比较P、PI和PID三种调节器对系统余差和动态性能的影响。
比例控制输出与输入的偏差成比例,比例控制有余差,在同样的负载的扰动下,比例增益越大,余差越小;在相同比例增益下,负荷变化量越大,余差越大。但是比例控制及时,控制有利能提高动态响应过程。
PI控制中,I控制作用输出与偏差随时间的积累量成正比,只要存在偏差,I控制作用就会不断累积,使偏差减少到等于零。PI控制中,P比例为主,I积分为辅,当偏差一出现,就立即有P 控制输出用于克服扰动,然后,I控制作用逐渐增加,用于消除余差,虽然PI能无差控制,但是它的动作过程慢,而且积分作用对系统稳定性不利。
PID控制作用对过渡过程的影响与PI控制作用的影响类似。其中,P作用是基本控制作用;I作用能消除余差,但使系统稳定性变差,而环响应慢,增大K使系统振荡加剧;D作用使整个开环频率特性的幅值比增大,改善系统稳定性。
PID控制中由于积分控制作用,控制系统无余差,添加微分作用可使系统响应变快,回复时间缩短。
实验三、串级控制系统的参数整定
———上、下水箱液位串级控制系统
一、 实验目的
1、通过实验进一步了解并熟悉串级控制系统的结构与原理。
2、利用所提供的实验装置构成一个液位与液位串级控制系统。
3、利用所提供的实验装置构成一个液位与流量串级控制系统。
4、了解串级控制系统的投运与参数整定方法。
二、 实验设备
1、THKGK-1型过程控制实验装置:
GK-02、 GK-03、 GK-04(两台)、 GK-07
2、万用电表一只、计算机系统
三、 实验原理
单回路控制系统解决了工业生产过程中大量的参数定值控制问题。
1、串级控制系统的结构
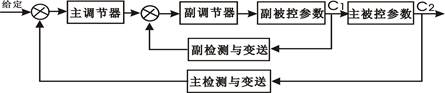
图3-1、 串级控制系统结构
如图所示,串级控制系统是指不止采用一个调节器,而是将两个或几个调节器相串联,并将一个调节器的输出作为下一个调节器设定值的控制系统。
四、 实验步骤
1、自行考虑并连接液位与液位的串级控制系统。
2、自行设计液位与流量串级控制系统的方框图,并利用所提供的实验装置连接系统。
3、连接好实验线路,并进行零位与增益的调节。
4、正确设置PID调节器的开关位置:
副调节器:纯比例控制,反作用,自动。
主调节器:比例积分控制,反作用,自动。
5、试利用一步整定法整定系统:
(1)、先将主、副调节器均置于纯比例P调节,并将副调节器的比例度δ调到30%左右。
(2)、将主调节器置于手动,副调节器置于自动,通过改变主调节器的手动输出值使下水箱液位达到设定值。
(3)、将主调节器置于自动,调节比例度δ,使输出响应曲线呈4:1衰减,记下δs和Ts,据此查表求出主调节器的δ和Ti值。
(注):阀8的开度必须小于阀5的开度实验才能成功。
五、实验分析
分析液位与液位串级控制系统的工作过程,并画出控制系统方框图
如上图所示,要对液位LT2进行控制,LT1液位在它上面,其流出量能快速影响到LT2。所以把LT2定为主被控变量,LT1定为副被控量。
当LT1的流量波动时,LT2的液位还没有发生变化,主控制器输出不变,LT1的PID调节器受扰动的影响,使LT1的流量变化,副控制器改变控制阀开度,使其流量稳定。
当LT1和LT2同时变化时,主控制器通过主环及时调节副控制器设定,是LT1变化,保持LT2稳定,而副控制器一方面接受主控制器的输出信号,并根据LT1测量的变化进行调节,使LT1流量跟踪设定值变化,使LT1能根据LT2及时调整,最终使LT2回复到设定值。
第二篇:过程控制工程实验报告模板
成绩________
过程控制工程
实验报告
班级:_______________________________________ 姓名:________________________________________ 学号:________________________________________ 指导老师:_____________________________________ 实验日期:_____________________________________
目录
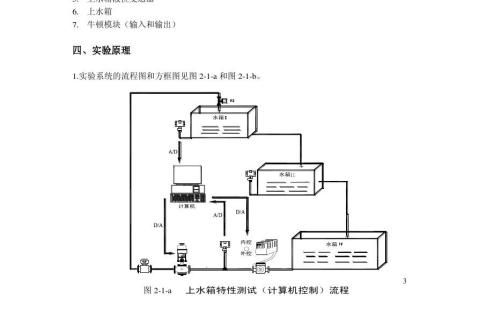
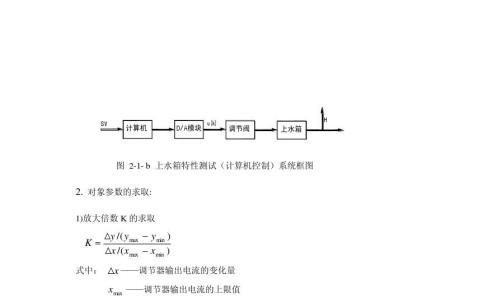
实验一 上水箱特性测试(计算机控制)实验 ??????????????????????2
实验二 压力单闭环控制系统的设计与实验 ??????????????????????7
实验三 上水箱液位和流量串级系统(计算机控制)?????????????????????9
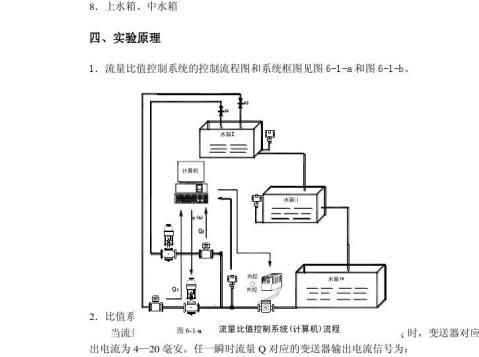
实验四 流量比值控制系统(计算机控制) ??????????????????????12
2
实验一 上水箱特性测试(计算机控制)实验
一、实验目的
通过实验掌握对象特性的曲线的测量的方法,测量时应注意的问题,对象模型参数的求取方法。
二、实验项目
1. 认识实验系统,了解本实验系统中的各个对象。
2. 测试上水箱的对象特性。
三、实验设备与仪器
1. 水泵Ⅰ
2. 变频器
3. 压力变送器
4. 主回路调节阀
xmin——调节器输出电流的下限值
?y——被测量的变化量
ymax——被测量的上限值
ymin——被测量的下限值
2) 一阶对象
G0?Ke??s T0s?1
K——广义对象放大倍数(求法见1)
T0——广义对象时间常数(为阶跃响应变化到新稳态值的63.2%所需要的时间) τ——广义对象时滞时间(即响应的纯滞后,直接从图测量出)
五、注意事项
1. 测量前要使系统处于平衡状态下,反应曲线的初始点应是输入信号的开始作阶跃信号的瞬间,这一段时间必须在记录纸上标出,以便推算出纯滞后时间τ。测量与记录工作必须
2. 所加扰动应是额定值的10%左右。
六、实验说明及操作步骤
4
1.了解本实验系统中各仪表的名称、基本原理以及功能,掌握其正确的接线与使用方法,以便于在实验中正确、熟练地操作仪表读取数据。熟悉实验装置面板图,做到根据面板上仪表的图形、文字符号找到该仪表。熟悉系统构成和管道的结构,认清电磁阀和手动阀的位置及其作用。
2.将上水箱特性测试(计算机控制)所用实验设备,参照流程图和系统框图接好实验线路。
3.确认接线无误后,接通电源。
4.运行组态王,在工程管理器中启动“上水箱液位测试实验”

阶液位对象。




按钮观察输出曲线。
6.在

会影响系统稳定所需的时间)。
7.

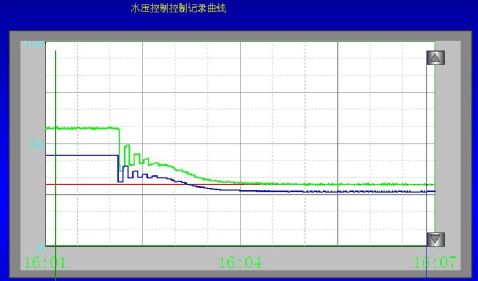
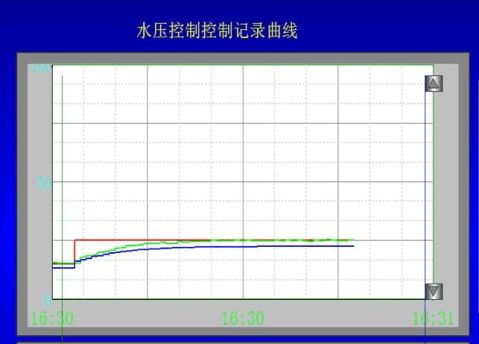
改变u(k)输出,给系统输入幅值适宜的正向阶跃信号(阶跃信号在5%-15%之间),使系统的输出信号产生变化,上水箱液位将上升到较高的位置逐渐进入稳态。
8.观察计算机中上水箱液位的正向阶跃响应曲线,

直至达到新的平衡为止。
9.改变u(k)输出,给系统输入幅值与正向阶跃相等的一个反向阶跃信号,使系统的输出信号产生变化,上水箱液将下降至较低的位置逐渐进入稳态。
10.为止。
七、实验报告
5
6
实验二 压力单闭环控制系统的设计与实验
一、 实验目的
1、
2、
3、
4、
5、 熟悉单闭环控制系统的特点、组成及工作原理。 熟悉控制器PID参数对过渡过程的影响。 掌握单闭环控制系统的设计及控制器参数整定方法。 培养学生对检测系统的综合应用能力。 通过理论联系实际,加强对学生实践动手能力和开发创新能力的培养。
二、 实验任务
根据实验室现有设备,设计一压力单闭环控制系统以满足储罐压力控制要求,并自选一种控制器参数整定方法对其进行参数工程整定。
三、实验设备与仪器
1.水泵Ⅰ
2.压力变送器
3.变频器
4.牛顿模块(输入、输出)
5.上水箱液位变送器
6.流量计
7.调节阀
7
8
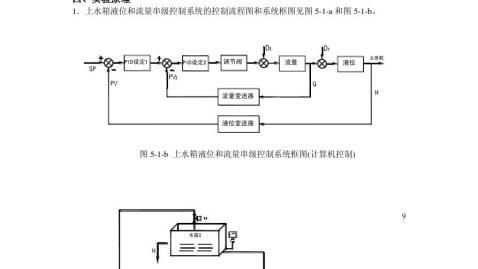
实验三 上水箱液位和流量串级系统(计算机控制)
一、实验目的
1.通过实验掌握串级控制系统的基本概念,掌握串级控制系统的组成结构,即主被控参数、副被控参数、主调节器、副调节器、主回路、副回路。
2.通过实验掌握串级控制系统的特点、串级控制系统的设计,掌握串级控制主、副控制回路的选择。掌握串级控制系统参数整定方法,并将串级控制系统参数投运到实验中。
二、实验项目
1.掌握串级控制系统的组成及特点并连线构成一个液位-流量串级控制系统。
2.将上述串级控制系统投入自动。
3.对该系统进行调节器参数整定,使系统的阶跃响应出现4:1衰减比。
三、实验设备与仪器
1.水泵Ⅰ
2.压力变送器
3.变频器
4.牛顿模块(输入、输出)
5.上水箱液位变送器
6.流量计
7.调节阀
2.对串级控制系统的参数整定应采用先副后主的整定方法,或将副调节器的参数按经验给定,再对主回路进行一步整定。整定的方法可用单回路整定时的经验凑试法、衰减曲线法、反应曲线法等。
五、注意事项
1.加干扰应在系统稳定的前提下进行。
2.组态王软件中,下标为1的是副回路参数,下标为2的是主回路参数。
六、实验说明及操作步骤
1.打开计算机组态王软件的工程管理器,选中“串级实验”,点击运行,进入串级实验界面。
2.点击“自动/手动”按钮,使系统在自动状态,点击“PID设定按钮”,调出PID设定界面。
3.投入参数,观察液位和流量的曲线,调整参数观察计算机控制的效果。待系统稳定后,给定加个阶跃信号,观察其液位的变化曲线。
4.再等系统稳定后,给系统下水箱加干扰信号,观察下水箱液位变化的曲线。
七、实验报告
10
实验四
一、实验目的
流量比值控制系统(计算机控制) 11
1.通过实验加深了解比值控制系统的基本概念、比值控制系统的结构组成。
2.掌握比值系数的计算,掌握比值控制系统的参数整定。
二、实验项目
1.掌握比值控制系统的组成及特点并连线构成一个比值控制系统。
2.将上述串级控制系统投入自动。
3.对该系统进行调节器参数整定。
三、实验设备与仪器
1.水泵Ⅰ
2.压力变送器
3.变频器
4.主回路调节阀、主回路流量计
5.副回路调节阀、副回路流量计
6.比例器
7.牛顿模块(输入、输出)
I = Q/QMAX×16 mA + 4 mA
则主副流量变送器的输出电流信号为:
I 1=Q1/Q1MAX×16 mA + 4 mA
12
I 2=Q2/Q2MAX×16 mA + 4 mA
主流量信号I1经分流器分流后送到调节器的外给定端,而副流量信号I2则进入调节器的测量端。调节器选用PID控制规律,当系统稳定时:
I2 = Kc×I 1
Kc为比例器比值系数。当生产工艺要求两种物料比值 k= Q 2/ Q1时,可得:
KC?
I2?4Q/Q2MAX?16?4-4Q?2?k1MAX I1?4Q1/Q1MAX?16?4-4Q2MAX
五、注意事项
1.本实验需要设置的参数如下:
KP=3 (参考值)(比例增益)
Ti=18 (参考值)(积分时间 秒)
Td=0 (参考值)(微分时间 秒)
Sp (计算机控制给定值)
U(k) (计算机输出值)
PV (主流量检测值)
PV2 (副流量检测值)
Kc (比值系数)
2.本实验需要恒压供水。
六、实验说明及操作步骤
1.根据实验系统流程图,将流量比值实验所用设备,按系统框图连接。
2.接通总电源和各仪表电源。
3.调出计算机控制的流量比值实验界面。将“手动/自动”按钮转换到自动状态,点击“PID设定”按钮,调出PID参数设定界面。选取适当的PID参数投入运行。
4.调节KC,改变流量的比值。
5.系统的参数整定,调节器的参数整定可按单回路或串级控制系统 的整定方法进行。
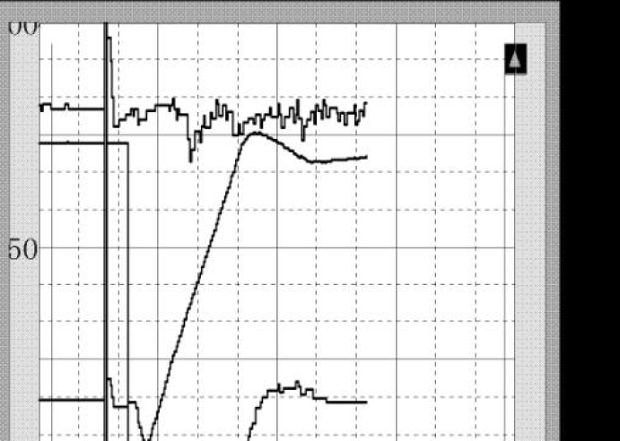
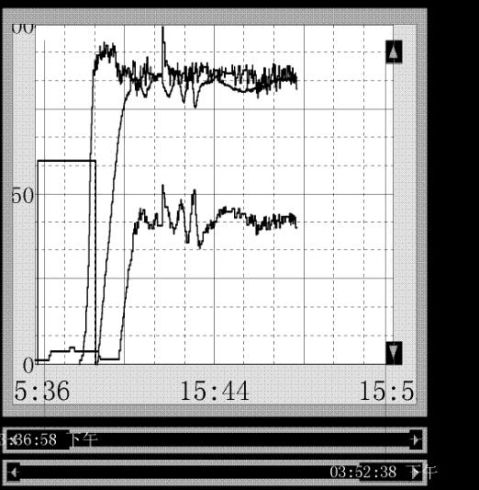
6.系统稳定后,改变主回路中流量的大小,观察副回路流量的变化。
7.观察计算机上历史曲线的变化。记录并处理历史曲线。
8.改变比例器的比例系数,观察流量的变化。
七、实验报告
13
14