
科研训练报告
题 目:基于单片机的焊缝跟踪系统设计
学生姓名:王宏友
学生学号:201110101018
学 院:机械学院
班 级:机制11-2
指导教师:孙鹏文
20##年 12 月 26 日
目录
1 选题的背景和意义…………………………………………………………………..1
1.1选题的目的及来源……………………………………………………………1
1.2国内外相关研究现状、发展趋势及研究意义………………………………………….2
2 研究内容与预期研究成果…………………………………………………………..3
2.1研究目标………………………………………………………………………3
2.2主要研究内容…………………………………………………………………3
2.3研究方案及技术路线…………………………………………………………6
2.4 拟解决的关键技术……………………………………………………………6
2.5 预期研究成果………………………………………………………………….6
3主要参考文献………………………………………………………………………….7
1、选题背景和意义
1.1 选题背景和目的
焊接机器人可以提高效率、优化质量、改善劳动条件,因而发展和应用焊接机器人对我国国民经济起到巨大的作用。目前的焊接机器人大多为可编程的不教再现机器人,这种机器人可以在其工作空间内精确地完成不教的操作。在焊接机器人施焊的过程中,如果焊接条件基本稳定,则机器人能够保证焊接质量。但是,由于各种因素的影响,实际的焊接条件经常发生变化。例如:由于强烈的弧光辐射、高温、烟尘、飞溅、坡口状况、加工误差、夹具装夹精度、表面状态、和工件热变形等影响会使焊枪偏离焊缝,从而造成焊接质量下降甚至失败。因此,焊接条件的这种变化要求焊接机器人能够实时检测出焊缝的偏差,并调整焊接路径和焊接参数,保证焊接质量的可靠性,这就需要一种可以实时检测并跟踪焊接状态的系统,即焊缝跟踪系统。
早在二十世纪四十年代埋弧焊刚刚诞生,电弧焊走上自动化道路的初期,人们就急待解决焊缝跟踪这一问题。焊缝自动跟踪系统的完善与否,是决定焊接自动化水平高低的关键。因而,焊缝自动跟踪技术是焊接自动控制领域中的一项极其重要并迫切需要解决的研究课题。
近几年来,一方面由于窄间隙厚板自动焊、全位置自动焊及弧焊机器人的开发研究,使这一问题更加突出;另一方面半导体传感器、激光及高智能控制技术的发展,又为解决这一问题提供了比较充裕的技术物质基础。目前,从传统的机械电子式到先进的弧焊机器人式焊缝跟踪系统都得到了广泛的应用。但是,由于焊接是一个非常复杂的过程,焊接生产中的加工误差、热变形、电磁干扰、卡具误差及其他各种干扰因素的影响,使得许多焊缝跟踪系统还不能得到令人满意的结果(如控制方法落后、系统稳定性差、可靠性差等)。迄今为止还没有一种能满足所有焊接过程的焊缝跟踪系统,每种焊缝跟踪系统都是针对具体焊接过程设计的。因此,焊缝跟踪至今仍是一个十分活跃的研究课题。
本课题设计了一套基于单片机作为控制系统的焊缝跟踪系统,它是以PLC作为控制核心,经传感器的实时检测,对焊炬的位置实时进行跟踪修正的系统,从而达到焊接机器人精确焊接的目的。本研究具有科学研究价值和强烈的工程应用背景。项目研究成果对于提高我国装备制造业相关领域的制造精度和生产效率提供了必要的理论基础和技术支撑。对于加速我国从制造业大国向制造业强国的转变有着极其重要的意义。
1.2 国内外相关研究现状、发展趋势及研究意义
(1)研究现状及其发展趋势
国外关于焊接实时跟踪控制的研究主要集中在焊接传感器的选择以及控制方法的改进上。1985年保加利亚的D.Lakov提出了用模糊模型来描述弧焊过程的不确定性,借助于配置的非接触式激光传感器,用模糊控制推理对示教机器人的运动进行估计、预测和控制,实现焊缝的自动跟踪。1989年日本的S.Mursaami等研究了利用电弧传感弧焊机器人焊缝跟踪的模糊控制,该控制系统根据焊枪的振幅位置同焊丝与工件的距离关系判断焊点的水平和垂直位移,并在强烈的弧光、高温、烟所以下,采用基于语言规则的模糊滤波器和模糊控制器来设计焊缝跟踪控制系统,取得了较好的效果。美国Ohio州的Motoman公司推出了一种最高可以在60in_/min(152cm/min)焊接速度下进行焊缝跟踪的电弧传感跟踪系统。另一分支是焊接过程实时控制专家系统,这是焊接专家系统发展的一个重要方向, 但目前已开发的系统不是很多。国外已开发的此类专家系统如下表所示。
表1-1 国外已开发系统

其中Weldexcel 与NEWCS 两个软件虽已将离线工艺设计与在线实时控制结合起来, 但只是按已经拟订的工艺对工艺参数进行调整。而Camtech1000和Adaptitech1000则具有真正的实时性, 可完成零件定位、焊接操作、质量检查等功能。Expert System for Control of Welding Parameters还可给出最优焊接参数,从而控制焊接设备, 保持恒定的熔深和焊道高度。
我国对焊缝跟踪控制技术的研究起步较晚。80年代末以清华大学潘际銮院士为首的课题组在旋转电弧传感器方面做了大量的研究,并取得了有价值的成果。1993年清华大学博士廖宝剑在博士生费跃家的研究基础上,研制成功了一种空心轴电机驱动的旋转扫描传感器,并获得了国家专利。此后江西大学在此基础上在小型化和减震方面做了深入的研究,并做了进行一步的改进,并制造了样机。清华大学吴世德的博士论文较系统的研究了电弧传感器信息处理技术,通过空间变换,进行了扫描电弧传感器信号的频域特征分析,提出了特征滤波向量的电弧传感的信号处理方法
(2)单片机及其发展趋势
随着微电子技术和半导体工业的发展,半导体集成电路得到了迅速的发展,到了二十世纪七十年代出现了大规模和超大规模的集成电路。于是,人们就自然而然的想到将计算机的中央处理器(CPU)制作在一块大规模集成电路芯片中,这样就产生了微处理器(Mieroproeessor)。随着微处理器的不断发展和完善,人们又在其中制作了存储器(RAM瓜OM)、输入/输出1/O接口电路、定时器/计数器以及户JD转换等电路,这就使微处理器的功能大大增强。尤其是其中的只读存储器(ROM)可以存放控制中央处理器和外围设备进行工作的程序,这样整个芯片就成了一个独立的控制装置,可以用于实时控制、数据采集与处理等工作,因而称之为微控制器(Mierocontroller),俗称单片微型计算甲机,或简称单片机。
随着科学技术的不断向前发展,单片机技术也日趋成熟,单片机的功能越来越强大,应用范围也越来越广泛,受到了广大科技界人士的欢迎,使其成为计算机领域的一个重要分支。到目前为止,由单片机作为控制芯片而设计的各种开发装置、控制设备、电子仪器等种类繁多,不胜枚举。而将单片机技术应用到焊接领域对于焊接的自动化和智能化有着重要的意义。
本研究具有科学研究价值和强烈的工程应用背景。项目研究成果可为大型风机叶片纤维铺放控制技术的研究、铺放装备的研制奠定必要的理论基础和技术支撑,对于我区实现兆瓦级风电设备的本地化生产,彻底改善手工铺放的生产现状和落后局面,有着极其重要的现实意义。
2 研究内容与预期研究成果
2.1 研究目标
(1)建立基于单片机控制实现精确控制焊枪移动的方法;
(2)探究对复杂结构的焊接件的焊缝进行自动跟踪的规律。
2.2 主要研究内容
在综合了新形势下焊接领域对自动焊接的实际要求及发展趋势后,本课题以焊接机器人为研究对象,通过8031单片作为控制系统,研制出一种可以精确检测跟踪焊接状态以及时纠正偏差的焊接机器人系统。主要研究内容有:
(1)焊缝跟踪系统
焊缝跟踪系统如图2-1所示。它主要由非接触式超声波传感器,扫描装置、机头二维调节装置、单片机控制系统等部分组成。本系统采用扫描式超声传感焊缝跟踪方法, 即将非接触式超声波传感器置于焊炬前方,用一套扫描装置使传感器在焊道上方横向扫描。超声传感器发射超声波,遇到焊件金属表面时,超声波信号被反射回来,并由超声传感器接收。通过计算传感器发射到接收的超声波声程时间,可以得到传感器到工件之间的垂直距离。根据给定高度与实际检测高度的偏差,可以实现焊炬高度的检测和调整。利用寻棱边法可以检测焊炬的横向偏差,进而实施横向调整,实现焊缝跟踪。
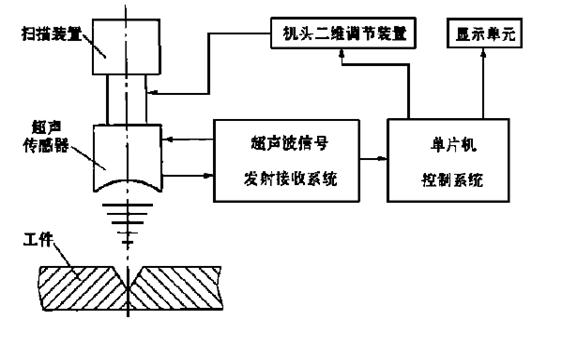
图2-1 焊缝跟踪系统框图
(2)焊缝跟踪中的非接触式超声波传感器的研究
焊缝自动跟踪是焊接自动化领域的重要研究课题,而检测焊缝位置的传感器又是焊缝跟踪研究中的关键。由于电弧焊产生的弧光、高温辐射和强磁场、电场以及金属飞溅、烟尘等严重干扰, 致使目前研究较多的光学和电磁传感器以及电视摄像等焊缝跟踪系统在实际焊接生产中的应用得不到满意的结果。随着超声波技术的发展,人们发现,超声传感器对电弧焊产生的强光、电、磁场等干扰不敏感,因此,开发、研制新型的非接触式超声波传感器对推动焊缝跟踪系统的研究及应用是非常有意义的。利用非接触式超声波传感器进行焊缝跟踪,它的关键技术是如何解决超声波的衰减及聚焦问题。经过理论分析及试验证明,根据焊缝跟踪的实际需要,非接触超声传感器的频率范围应选择0.5~1.5MHz之间,焦距为30~75mm左右为宜。
(3)焊缝跟踪的单片机控制系统的设计
焊缝跟踪的单片机控制系统如图2-2所示。。其核心是8031单片机,还包括2764EPROM、74LS373地址锁存器、8155可编程接口等。当系统通电或复位时,单片机开始执行2764EPROM中固化的程序,对焊缝位置的信息进行实时采集和处理,8031通过P1口输出控制脉冲信号控制步进电机驱动器,进而实现对调整执行机构的控制,实现超声传感焊缝自动跟踪。超声波传感器的信号(检测信号和同步信号)从8031单片机的INT0和INT1端输入。8031单片机通过8155接口实现焊缝位置显示和进行控制功能的切换。
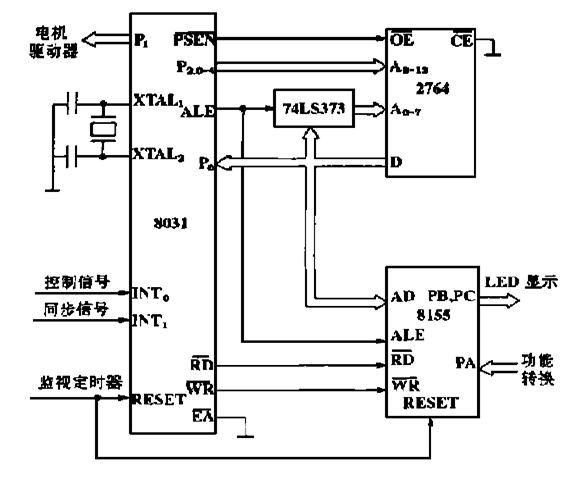
图2-2 单片机控制系统框图
显示单元采用了8个共阴极LED显示器和8个BCD锁存/8段译码/驱动器—CC4511组成。8155的PB、PC口将8031单片机处理后的焊缝位置数据送入CC4511进行BCD译码锁存,得到十进制数,进而驱动LED显示器进行显示。
本系统除采用了光电隔离方法、单独电源供电、软硬件滤波等抗干扰措施外,还采用了硬件“看门狗”技术,即采用了集成芯片—MAX1232监视定时器芯片。MAX1232每隔600ms将发出复位信号使单片机8031复位。因此,当软件程序正常运行时,在600ms 时间间隔内由单片机8031发出负脉冲信号,使MAX1232重新计时,防止其发出复位信号,从而保证程序正常运行。而一旦出现干扰影响,软件程序不能正常运行时,则在600 ms内,由软件控制的MAX1232的重新计时脉冲不能发出,当MAX1232计时到600ms时,就会向8031单片机发出复位脉冲,使整个单片机控制系统复位。
控制软件包括主程序及各子程序:手动调整、高度检测、高度调整、左右偏差检测、左右扫描数显示、高度显示、左右调整等程序。
2.3 研究方案及技术路线
(1)焊接跟踪系统的组建
1)焊接系统结构设计
2)检测及反馈系统的设计
3)编写控制程序
4)编写用户程序调试工程
5)整体连续调试测试
(2)PLC程序的设计
1)根据实际的控制需要选择PLC及其配套模块,配置硬件系统。
2)根据工艺要求和控制要求,设计梯形图。
3)把梯形图写入PLC,反复调试直至程序符合控制要求。
2.4 拟解决的关键技术
(1)基于单片机的精确控制焊枪移动的方法;
(2)掌握复杂结构的焊接件的焊缝进行自动跟踪的规律。
2.5 预期研究成果
(1)研究了处理图像和确定焊缝中心的方法,找到了对复杂结构的焊接件的焊缝进行自动跟踪的规律。
(2)并开发了一套基于单片机的焊缝跟踪控制软件,软件在实验中运行良好。
3、主要参考文献
[1] 曹丽婷,田景文,聂雪媛. 焊接机器人焊缝自动跟踪系统[J]. 微计算机信息.2006(07)
[2] 胡绳荪,李顺华,孙栋. 焊缝跟踪模糊控制器的研究[J]. 电焊机. 2000(09)
[3] 洪学寰,吴钊君,敦晓彪.自动焊缝跟踪系统的设计与实现[D].哈尔滨工业大学硕士学位论文.2011
[4] 姜海荣.单片机控制带焊缝跟踪埋弧焊机设计[D].沈阳工业大学硕士学位论文.2002
[5] 康丽,汤楠,穆向阳.焊缝跟踪系统及焊接过程智能控制技术的研究[J].山西科技.2008(03)
[6] 许贵芝,B.M巴纳宁.对接焊缝跟踪系统中单片机的应用[J].航空精密制造技术.1999(04)
[7] 胡绳荪,张绍彬,侯文考.焊缝跟踪中的非接触式超声波传感器的研究[J].仪表技术与传感器.1999(04)
[8] 程岩.超声波传感器焊缝跟踪系统的研究[J].仪器仪表用户.2005(06)
[9] 吴冬春,李金友.基于模糊控制的焊缝自动跟踪系统的设计[J].组合机床与自动化加工技术.2011(06)
[10] 杜成超,郭华锋,许成.基于Matlab的焊缝跟踪系统的设计[J].电子设计工程.2011(20)
[11] 葛玉华,霍立兴,张玉凤.焊接专家系统的应用及发展[J].焊接技术.2000(02)
[12] 刘文军,罗玉峰,李佩武.基于HHARM9的机器人焊接跟踪系统[J].微计算机信息.2007(14)
[13] 熊震宇,张华,贾剑平,潘际銮.基于旋转电弧传感的弧焊机器人焊缝跟踪系统[J].中国机械工程.2003(12)
[14] 徐培全,唐新华,李莉娜,徐国祥,姚舜.视觉床机器人焊缝跟踪系统[J].上海交通大学学报.2008(01)
[15] 郭文斌,程耀瑜,刘清文.基于CCD焊缝自动跟踪系统的设计[J].微计算机信息.2008(21)
第二篇:科研基础训练报告
科研基础训练报告
学院:医疗器械与食品学院
专业:药物制剂
姓名:殷晨
学号:1119060213
老师:佀国宁
(一)如何查阅文献... 3
(二)英文文献的翻译... 5
2.1介绍... 6
2.2在片剂生产粉末压缩过程存在的问题... 7
2.3超声波... 7
2.4 超声应用的原则和程序... 8
2.5超声辅助粉末压缩... 9
2.6超声的物理辅助压缩过程... 10
2.7提高片剂机械强度... 11
2.8超声辅助压缩片剂的局限性... 12
2.8.1材料的适宜性... 12
2.8.2超声对片剂崩解的不利影响和溶解... 13
2.8.3药物稳定性... 13
2.8.4设备方面的考虑... 14
2.8.5安全性... 14
2.9 结论... 14
(三)ABAQUS6.10的学习... 14
3.1有限元... 14
3.2ABAQUS6.10. 15
3.3ABAQUS建模与仿真的步骤... 16
3.3.1part(零件或部件)... 16
3.3.2 Property(材料属性)... 16
3.3.3Assembly(零件装配)... 16
3.3.4 Step(分析部)... 17
3.3.5 Interaction(接触)... 17
3.3.6 .Load(载荷、边界条件)... 17
3.3.7 Mesh(网格)... 18
3.3.8Job(提交分析)... 18
3.3.9 Visualization(结果后处理)... 18
(四)总结... 18
(一)如何查阅文献
经过3个星期的基础科研训练学习,我们对以前相对陌生的词汇‘文献’有了认识和了解并学习了如何查阅我们所需要的中文和英文文献。文献是通过一定的方法和手段、运用一定的意义表达和记录体系记录在一定载体的有历史价值和研究价值的知识。文献的基本要素是:1.有历史价值和研究价值的知识;2.一定载体;3.一定的方法和手段;4.一定的意义表达和记录体系。人们通常所理解文献是指图书、期刊、典章所记录知识的总和。文献是记录、积累、传播和继承知识的最有效手段,是人类社会活动中获取情报的最基本、最主要的来源,也是交流传播情报的最基本手段。按信息被加工的程度我们将文献资料分为三类。一次文献:包括图书,期刊,会议文献,学位论文,专利文献,政府出版物,产品样本,科学报告,标准文献和档案等。二次文献:目录,题录,索引和文摘等。三次文献:综述和述评等。
查询专业文献(尤其是英文论文)应该用Google搜索,大多数都能直接搜到免费下载或在线的,但某些期刊或会议是收费的就没办法了,你可以考虑在百度知道上求助。当然如果你用的是校园网的话,因为高校图书馆一般都购买了主流期刊、会议数据库的版权,所以在校园网内就可以直接下载不少收费论文,或者上学校图书馆网站去搜搜看。
根据自己所要检索的内容选择相应的主题,篇名,关键词,作者,来源期刊等检索条件,点击检索就可以找到自己想要的文献。如果要查阅英文文献,可以选择Elsevier数据库,IEEE数据库,Springer Link数据库,ASME等数据库。
(二)英文文献的翻译
在药物粉体压缩中超声的原理和应用
在药物粉末压片过程中使用超声波是一个新的概念。然而,在冶金,塑料,陶瓷行业,超声辅助压缩已经广为人知。超声在压缩过程中体现的优点:压块的机械可以不施加过大的压力。因此,借助于超声相比于传统的压制过程可以克服一些在高压压缩上的问题,使制造更加经济。尽管超声辅助粉体压缩在理论上的认识在20世纪60年代后期取得了巨大进步,但是药物粉体压缩在超声领域仍需要进一步研究。在对药物和辅料进行更深度的调查后,对扩大超声辅助技术的实用性范围以及过程中所涉及的复杂现象都要深入调查。本文在原理,优势,应用方面进行综述。
关键词:药物粉体压缩,超声,压片
2.1介绍
片剂是广泛使用的剂型。片剂简单而便于管理,可以快速大规模生产,容易储存,包装和分配。片剂容易由粉末压缩产生,虽然压缩过程机械操作看似简单,但仍然存在一些问题:如压缩低强度的片剂,封盖,粘结和直接压缩上都存在有局限性。压力是一个可能被提高的因素。早期的方法是集中在各种机械装置的压片改进上,显著地改进是在旋转压片工艺的设计和机器共同压片。另外,由于日益增加的医药产品,对粉体压缩进行深度的研究正在进行。在压缩过程中,药物粉体压缩和粉末冶金,塑料行业在生产的要求上相一致。其结果是,这些行业为药物粉体压缩提供了基础研究。在不施加过大的压力下实现最佳的机械强度。超声粉末压缩过程中的应用是实现这一目标的一种新方法。超声波不是传统的压缩过程,所以高压压缩相关的问题可能会被克服。
2.2在片剂生产粉末压缩过程存在的问题
通常情况下,片剂是由一个单一的连贯的单元模具压缩粉末所形成的。由于塑性流动和颗粒与颗粒的相互作用导致范德华力的形成,在压制过程中机械强度增加,因此粉末压缩可以在特定的强度下压缩成颗粒。该系列片剂的压缩喷射过程:过渡的改装粉末,颗粒变形点接触,脆性颗粒碎片之间的接合,固体的弹性形变,减压回收片剂。药物粉末的可压缩性是产生缺陷的主要原因。超声波的原理与应用在药物片剂生产中可以协助不可压缩材料的压缩
2.3超声波
超声是指声音的分贝超过18千赫,不能被人耳所能听到的声音,超声波所研究的材料在其结构和化学性质上不会受到任何永久性的改变
高强度超声:从严格意义上来说,所有的高强度超声所产生的能量在力学效应上将导致粒子产生运动。
热:超声波通过媒介时在介质中损失的能量以热的形式放出。因为在界面剪切处产生摩擦,所以能量吸收可能会很高。此外,大量的能量转化成的热量和超声振动振幅是成比例的。
搅拌:在分散的物质中超声波会产生剧烈的搅动,这加速了材料中粒子的运动。
化学反应:化学活性,特别是氧化反应,可能会加速
机械应力的影响:超声场中能引起材料表面腐蚀严重破裂。
2.4 超声应用的原则和程序
超声波在10~20千赫兹,10~100千赫兹,1千赫兹~2mhz这些范围内具有协助粉末压缩的辅助作用,通常超声波振幅在60毫米,但高于125毫米的振幅已经被用于聚合物的压制。
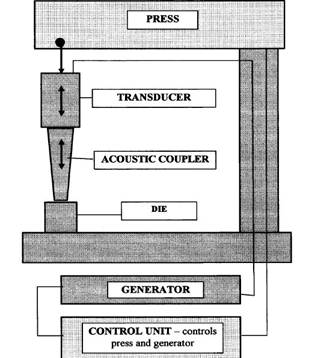
各种超声振动模式已被用于不同的应用,但最常用的是纵向,其他如扭转,径向或66以组合的形式也被使用。Tsujino and Ueoka (1979) 施加超声波振动,在上,下冲头施加纵向振动模式,模具中施加纵向,扭转和径向振动模式,可以压制成紧凑的金属粉末。超声辅助压缩设备和程序可能会有所不同,这取决于材料处理和成品所需的特性。虽然有不同的电路设计,但所有的超声波压缩装置都包含下列基本部件
一、发电机是一种电高频单元,其中将传统的50到60赫兹的直流电转化为在超声范围内的20到50千赫兹的交流电。发电机的实际工作频率是由换能器的机械共振频率
和耦合器决定的。输出可能会有所不同,从50瓦到数千瓦。二,换能器将高电频发电机的输出频率转换为高频机械振动。任何超声波系统将能量从一种形式转变为另一种这是最基本的要素。两种不同类型的材料,用于转换机械振荡,材料为磁或“伸缩”(金属)和压电材料(特种陶瓷材料)。磁传感器是由一批磁性材料制成的,例如,纯镍和铁钴合金,选择这些材料基于外加磁场发生变形。piezomag—磁传感器是不常用的,由于其较差的电声转换效率(消耗掉约70%的能源为热)。此外,一个磁转换器通常需要液体冷却,其有效的成本是不切实际的。三,耦合器使从传感器到粉末的机械振动放大。理想情况下,使用一个耦合器其材料应具有良好的声学性能,抗疲劳强度高,低声损耗,低密度并且价格不贵。因此,一般选择的材料是高强度铝和钛合金。
2.5超声辅助粉末压缩
它限制了静态负荷,温度以及压缩时间。人们已经发现,使用超声振动(10~20千赫)提高了金属压块密度和机械强度,导致压实材料结构的致密性和均匀性增加。
 虽然大功率超声振动已被使用来协助金属,陶瓷或塑料材料的压缩,但是医药技术领域只报道了少数文件,第一个可追溯到1993,这已经取得了可喜的成果。因此,超声仍然是一个辅助压缩的新方法。用制药工业中的粉末,盖雷(1993)同时应用超声机械压力辅助药物压缩和化妆品制剂。他所用粉末混合物是5到80% W / W的至少一种热塑性材料,如聚乙烯,聚苯乙烯,聚酰胺,聚氯聚(对苯二甲酸乙二醇酯),其余至少一个非热塑性无机或有机物质。它发现在热塑性产品的存在会形成一个框架,使非热塑性粉末混合在一起。
虽然大功率超声振动已被使用来协助金属,陶瓷或塑料材料的压缩,但是医药技术领域只报道了少数文件,第一个可追溯到1993,这已经取得了可喜的成果。因此,超声仍然是一个辅助压缩的新方法。用制药工业中的粉末,盖雷(1993)同时应用超声机械压力辅助药物压缩和化妆品制剂。他所用粉末混合物是5到80% W / W的至少一种热塑性材料,如聚乙烯,聚苯乙烯,聚酰胺,聚氯聚(对苯二甲酸乙二醇酯),其余至少一个非热塑性无机或有机物质。它发现在热塑性产品的存在会形成一个框架,使非热塑性粉末混合在一起。
2.6超声的物理辅助压缩过程
传统的压缩技术结合振动压实和强夯要添加一个新的技术,允许新的性能(44)。然而,缺乏系统性知识和对超声的物理辅助压缩粉末优化工业制药加工步骤的了解。虽然人们试图解释涉及的一些现象,但物理机制这个过程还没有完全理解。
弗里德里克(1965)表明,粉末流因为容易在超声振动下形成颗粒,这一发现成为早期的起步阶段。在粉末压实中,基于叠加的高功率超声,两种不同的压实现象会发生。先是物质运动相对于模具可能发生,导致在材料和模具之间的摩擦减少;第二,单个粉末粒子相对另一个可能发生摩擦,使过早接触颗粒之间形成破碎。研究已经表明,超声波辅助压缩—锡安的过程所涉及形成热融合最适合于那些具有高的弹性模量和低熔点(34,46–47)的材料。
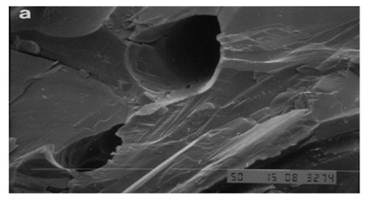
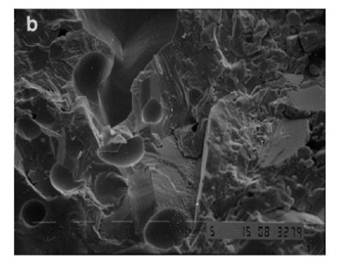
(显微镜显示在32兆帕的压力下压制阿莫尔片的图片a图在超声作用下放大5000倍,b图在无超声的条件下放大5000倍,c在无超声的条件下放大7500倍)。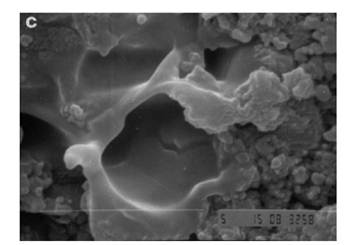


2.6.1协助直接压缩方法
造粒之前通常要进行粉末压缩,片剂制造方法的优点有如可以直接压缩,处理快,降低成本,并增加药物稳定性(3,49)。然而,对于一个高剂量的药物,如乙酰氨基酚,因其具有较差的可压缩性和流动性,直接压缩是不可能的。这是因为填料的粘合剂有一个有限的稀释作用,以及片剂的尺寸和重量是有限的;因此可以使用超声波来消除这些限制,超声辅助压缩技术可以用于在这些情况下,传统的压实则不可能。例如,超声辅助压实已用于生产高含量制剂无水茶碱片,这是不适合直接压缩的。
 2.7提高片剂机械强度
2.7提高片剂机械强度
(左图a:乙酰氨基酚片在32兆帕的压力并存在超声辅助在电子显微镜放大1000倍后的图片。图b为放大500倍后的图片)
相干片可以通过超声辅助制备而成,在较低的压力下,相比于传统的压缩压片,超声辅助压片可以表现出更大的破碎强度和较小的脆性。这些改进的性能使相关的片剂造成内部的温度升高。在我们的研究中发现在压片的布洛芬使用32兆帕的压缩力和1,2,或5秒超声(振幅7毫米),片剂的整体温度分别增加了约19,30,或368c。温度在片剂常规压缩过程中会升高,塑性和应力松弛,弹性下降造成片剂的拉伸强度增加。这也适用于超声辅助压缩,在超声允许提高温度范围内塑性变形和应力松弛发生,同时增加颗粒接触,导致生成压实度强的片剂。此外,这还会有助于片剂机械强度的增加。
 2.8超声辅助压缩片剂的局限性
2.8超声辅助压缩片剂的局限性
2.8.1材料的适宜性
当考虑超声辅助压缩药物粉末,一些基本的参数必须要考虑。最重要的是材料的适宜性。必须强调的是超声辅助药物粉末的压缩没有一种方法可以根据任何公式做出完美的片剂。材料的物理性质如熔点,接受整形能力变形,颗粒尺寸,和颗粒形状都影响超声辅助压缩的结果。可以预料,超声的应用并通过塑性流动将有益的是已知的材料的压缩。大部分发表超声辅助粉末压缩的论文的主题至少存在一种热塑性材料。这种材料当超声处理时可以形成一个框架,将粉末接合的在一起。
2.8.2超声对片剂崩解的不利影响和溶解
在压缩过程中超声的应用程序可能影响片剂的崩解和溶解。药物崩解和溶解程度取决于制定超声的参数。这可以归因于技术改造的—片剂对水的渗透速率可能发生变化,片剂孔隙度和interparticulate接合。
2.8.3药物稳定性
超声波引起的温度升高,这可能会导致在药物的物理或化学特性的不必要的变化。然而,大多数对超声波辅助药物压缩的论文主题声称,通过适当控制工艺条件可以使药物不发生降解。罗德里格兹等人报道,无药物(茶碱)或赋形剂(eudragitt RL)降解发生在其压缩使用超声能量范围内。
2.8.4设备方面的考虑
它是解决由于超声波振动产生温度上升的一个重要组成部分,它可以消散模具因热传导系数较高金属以及大多数的导热系数制成片剂的材料的高温。因此,在超声辅助压缩中模具和冲头的使用可能会缩短机器的寿命。该设备也应适当调整和定期检查,以防止的传感器损坏和避免过多的能量损失。
2.8.5安全性
一种超声用于偏好的原因:它是无声的。高强度的应用通常可以产生更有效地在可听频率,但由此产生的噪声可能是不能容忍的,可能造成伤害。
2.9 结论
超声辅助粉末压缩虽然可行,但为了使其技术更加的完善,我们仍然有很多的研究要做使其应用于大规模的生产中,以此来造福世界。
(三)ABAQUS6.10的学习
3.1有限元
有限元法(FEA,Finite Element Analysis)的基本概念是用较简单的问题代替复杂问题后再求解。它将求解域看成是由许多称为有限元的小的互连子域组成,对每一单元假定一个合适的(较简单的)近似解,然后推导求解这个域总的满足条件(如结构的平衡条件),从而得到问题的解。这个解不是准确解,而是近似解,因为实际问题被较简单的问题所代替。由于大多数实际问题难以得到准确解,而有限元不仅计算精度高,而且能适应各种复杂形状,因而成为行之有效的工程分析手段。
3.2ABAQUS6.10
ABAQUS是一套功能强大的工程模拟的有限元软件,其解决问题的范围从相对简单的线性分析到许多复杂的非线性问题。 ABAQUS 包括一个丰富的、可模拟任意几何形状的单元库。并拥有各种类型的材料模型库,可以模拟典型工程材料的性能,其中包括金属、橡胶、高分子材料、复合材料、钢筋混凝土、可压缩超弹性泡沫材料以及土壤和岩石等地质材料。作为通用的模拟工具, ABAQUS 除了能解决大量结构(应力 / 位移)问题,还可以模拟其他工程领域的许多问题,例如热传导、质量扩散、热电耦合分析、声学分析、岩土力学分析(流体渗透 / 应力耦合分析)及压电介质分析。
ABAQUS 被广泛地认为是功能最强的有限元软件,可以分析复杂的固体力学结构力学系统,特别是能够驾驭非常庞大复杂的问题和模拟高度非线性问题。 ABAQUS 不但可以做单一零件的力学和多物理场的分析,同时还可以做系统级的分析和研究。 ABAQUS 的系统级分析的特点相对于其他的分析软件来说是独一无二的。由于 ABAQUS 优秀的分析能力和模拟复杂系统的可靠性使得 ABAQUS 被各国的工业和研究中所广泛的采用。 ABAQUS 产品在大量的高科技产品研究中都发挥着巨大的作用。
3.3ABAQUS建模与仿真的步骤
3.3.1part(零件或部件)
一个模型通常有一个或几个组成。一个部件又由一个或几个几何体构成。Part模块的组要功能就是建立有限元分析模型所需要的部件,建立部件有两种途径:一是在ABAQUS中直接建立部件,二是从其他的软件中导入部件(如UG,Solidworks,Catia等)。
3.3.2 Property(材料属性)
材料参数是有限元分析的基础,材料弹性模型只需要两个参数弹性模量和泊松比
3.3.3Assembly(零件装配)
各个零件建立好了之后还要把它们装配后才可以分析,在装配过程中要用到各种约束给零件定位。
3.3.4 Step(分析部)
对模型施加荷载和边界条件之前或者定义模型的接触问题之前,必须定义分析步。然后可以指定在哪一步施加荷载,在哪一步施加边界条件,哪一步去定相互关联。
3.3.5 Interaction(接触)
这个部分是介绍有关定义部件之间相互作用的。接触是边界条件高度非线性的。遇到非线性问题ABAQUS就会采用迭代的方法求解,这需要大量的资源和时间。
3.3.6 .Load(载荷、边界条件)
在加载模块(load)中施加边界条件和荷载。施加边界条件和载荷也依赖于说建立的分析步。 实体单元(solid element)只有平动自由度,没有转动自由度,所以施加边界条件时只
需约束起平动自由度即可。对于分析刚体来说,约束只能加给分析刚体的参考点。 缺省的情况下,ABAQUS 将边界条件传递给其后的每一个分析步。对每一个分析步中的边界条件可以进行编辑和修改。
3.3.7 Mesh(网格)
网格划分是有限元分析的基础,核心计算的程序要用到的是划分后几点信息和单元信息。而且单元划分质量的优劣直接影响到计算结果的精度。
3.3.8Job(提交分析)
3.3.9 Visualization(结果后处理)
(四)总结
通过这三周的科研基础训练学习,我掌握了科学研究的基本步骤,培养了解决科学研究问题的能力。以后在遇到科学研究问题时知道运用查找中英文的相关文献来对这一问题进行了解并可以借助相关的软件进行建模和仿真。所以,我认为这三周的科研基础训练使我获益匪浅。