运动控制器基本功能实验报告
一 实验目的
1. 了解运动控制器、伺服电机控制系统组成方式;
2. 了解运动控制器基本使用方法;
3. 初步掌握应用编程方法
二 实验装置
1. 运动控制器:美国Galil DMC4080运动控制器
2. 伺服电机:日本安川SGDV 750W伺服电机
三 实验原理

四 实验方法与步骤
在计算机上安装Galil SUITE软件。参考《DMC-2143使用手册》第六、七章,在软件中输入指令,分别实现下列功能:
1. 多轴按照指定速度、位置,各自独立运动;
要求:自己设定速度、位置;
程序;说明
#A
PA2000,1500,100 A,B,C 轴运动距离分别为2000,1500,100 计数单位
SP15000,10000,5000 A,B,C 轴运动速度分别为15000,10000,5000 计数单位/sec
AC500000,500000,500000 各轴加速度为500000 计数单位/sec2
DC500000,500000,500000 各轴减速度为500000 计数单位/sec2
BGA
WT20
BGB
WT20
BGC
EN
`
2. 多轴电子齿轮同步运动;
要求:B主动,C从动,传动比为3
程序:
#A
GA,B
GR,3
GD6000
#START
PR,,10000
SP,,1000
BGB
AM
WT2000
JP#START
EN
3. 三轴铣削模拟加工应用编程;
加工图:
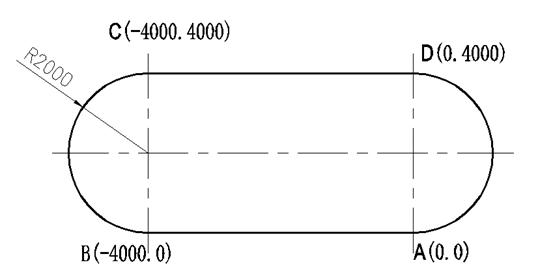
程序:说明
#A 标号
VM XY X、Y 轴圆弧插补
VP l60000,160000 矢量位置
VE 结束矢量运动
VS 200000 矢量速度
VA l544000 矢量加速度
BGS 开始运动
AMS 运动完成时
PR,,-80000 Z 轴下降
SP,,80000 Z 柚速度
BG Z 开始Z 轴运动
AM Z 等待Z 轴运动完成
CR 80000,270,-360 圆弧
VE 结束矢量运动
VS 40000 进给率
BGS 开始圆弧运动
AMS 等待圆弧运动完成
PR,,80000 抬起刀具(Z 轴)
BGZ 开始Z 轴运动(抬刀)
AMZ 等待Z 轴运动完成
PR –21600 移动X 轴
SP 20000 X 轴速度
BGX 开始X 轴运动
AMX 等待X 轴运动完成
PR,,-80000 落下Z 轴(下刀)
BG Z
AM Z
CR 80000,270,-360 第2 个圆弧切割
VE
VS 40000
BG S
AM S
PR,,80000 抬刀
BG Z
AM Z
VP –37600,-16000 X、Y 轴返回到起点
VE
VS 200000
BG S
AM S
EN
第二篇:工业机器人实验

实验报告
姓 名: 焦生嗣
学 号: 1000401025
指 导教师: 赵兵
专业 年级: 10级机械设计制造及其自动化(1)班
所在学院和系: 机械工程学院
实验二 工业机器人
一、实验目的
通过观察搬运机械手搬运货物(圆柱坐标机器人)、关节坐标机器人示教编程、人工智能行走机器人,了解工业机器人的分类,分析其机械传动及驱动系统结构,初步掌握工业机器人相关控制技术。
二、实验要求
分别绘制三种机器人结构简图,关节配置及运动示意图,描述其基本结构及传动过程;并通过框图形式描述其控制系统结构。
三、实验内容
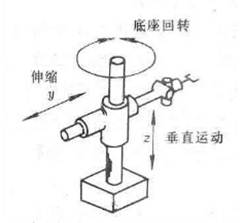
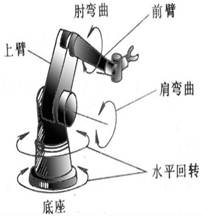
图1 圆柱坐标机器人结构简图 图2 关节坐标机器人
1、圆柱坐标机器人
工业机器人的运动,可从工业机器人的自由度,工作空间和机械结构类型等三方面来讨论。
如图3所示,为工业机器人机构的简图。
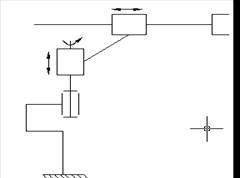
图3 机构简图
a.工业机器人的运动自由度
所谓机器人的运动自由度是指确定一个机器人操作位置时所需要的独立运动参数的数目,它是表示机器人动作灵活程度的参数。
本设计的工业机器人具有四转动副和移动副两种运动副,具有手臂伸降,旋转,前后往复三自由度。
b.机器人的工作空间和机械结构类型
(1)工作空间 工作空间是指机器人正常运行时,手部参考点能在空间活动的最大范围,是机器人的主要技术参数,工作空间图如图4。
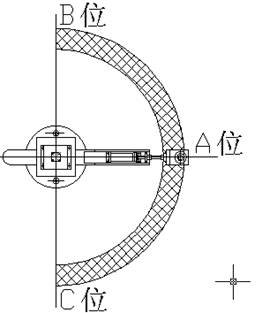
图4 工作空间图
(2)机械结构类型
圆柱坐标型为本设计所采用方案,这种运动形式是通过一个转动,两个移动,共三个自由度组成的运动系统(代号RPP),工作空间图形为圆柱形。它与直角坐标型比较,在相同的工作条件下,机体占体积小,而运动范围大。
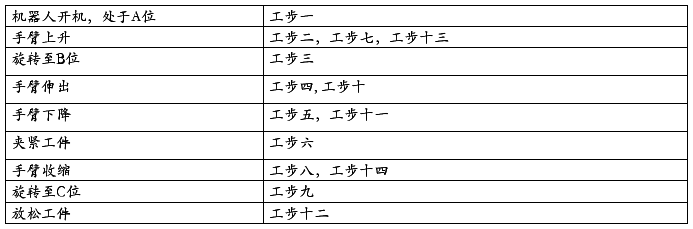
(3)机器人的运动过程分析
工业机器人的运动过程中各动作如图5和表1。
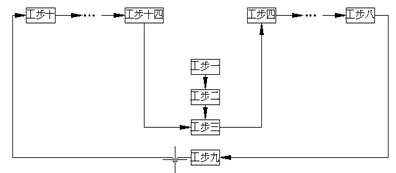
图5
表1
2、关节坐标机器人
工业机器人一般有以下几部分构成:
机身部分:如同机床的床身结构一样,机器人机身构成机器人的基础支撑。有的机身底部安装有机器人行走机构;有的机身可以绕轴线回转,构成机器人的腰。 臂部分:分为大臂、小臂和手腕,完成各种动作。
末端操作器:可以是拟人的手掌和手指,也可以是各种作业工具。
关节:分为滑动关节和转动关节。实现机身、手臂各部分、末端操作器之间的相对运动。