控制系统仿真实验报告
——
一、实验目的:
进一步掌握数值积分法;
进一步掌握MATLAB软件的使用方法。
二、实验设备:
数字计算机,MATLAB软件
三、实验预备:
(1)将传递函数化为一阶微分方程组(即状态方程);
 令
令 ,
, ,则
,则
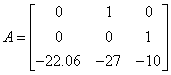
写作矩阵形式:

(2)分别写出四种方法的计算公式;
令 ,
,  ,
, ,
,
则可化为
① 欧拉法:
② 改进欧拉法:
③ 四阶经典龙格库塔法:
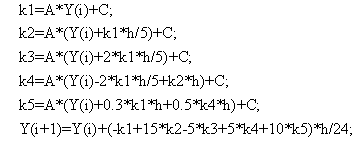
④ 四阶亚当姆斯预估校正法:

(3)理论分析:计算系统特征值。结合系统特征值,对四种方法的稳定性进行分析,确定每种方法步长的取值范围,即h临界。
计算得特征值为 及
及 ,取特征值
,取特征值 。
。
故对欧拉法:由 ,则
,则 ;
;
对改进欧拉法:;
对四阶经典龙格库塔法: ;
;
⑤ 对四阶亚当姆斯预估校正法:计算得 ,但在实际仿真中发现取时,不稳定,实际中应取
,但在实际仿真中发现取时,不稳定,实际中应取 。
。
四、实验步骤:
(1)编写matlab程序,每种方法选取0.01、0.1、0.5*h临界、h临界四种步长求数值解,分别与解析解比较。画出matlab程序的流程图。

(3)结果输出
(4)给出仿真结果曲线图。
五、实验结果及分析:
实验结果

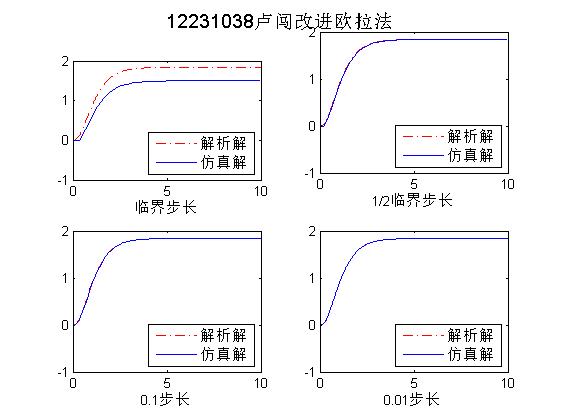
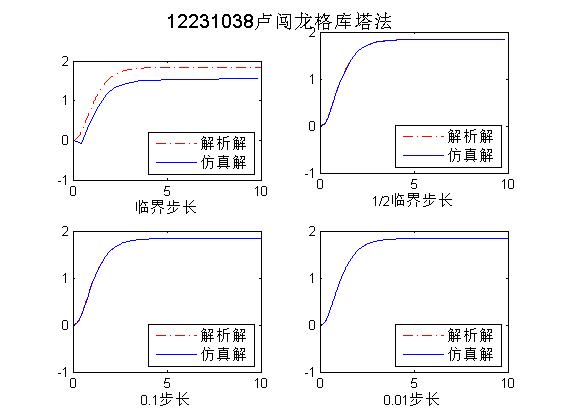
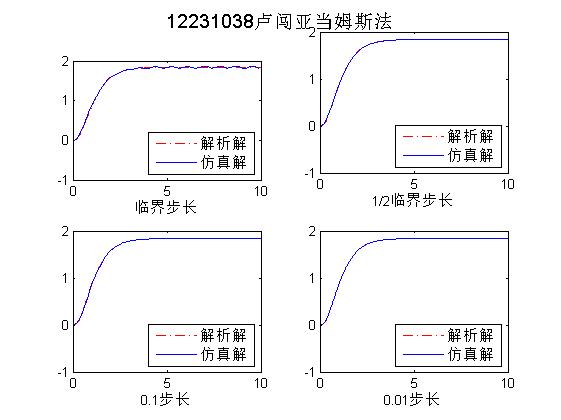
分析:通过以上四幅图可以发现,以上四种方法中改进欧拉法精度明显高于欧拉法,而四阶经典龙格库塔法、四阶亚当姆斯预估校正法精度又显著高于改进欧拉法和欧拉法。稳定性方面,欧拉法和改进欧拉法基本相同,四阶经典龙格库塔法稳定性最好,四阶亚当姆斯预估校正法临界稳定步长最小。同时,在实验中发现,欧拉法、改进欧拉法及四阶经典龙格库塔法步长稳定区与理论计算相同,但是四阶亚当姆斯预估校正法中,理论计算得,但在实际仿真中发现取时,不稳定,实际中应取,分析可能原因是因为多步法引入了其他误差,导致稳定区间变小。
六、收获
通过这次实验,不仅掌握了四种数值仿真方法的Matlab实现方法,也更清晰明白了这四种数值方法的优劣及特性。同时,在实验中,也学习了很多Matlab的使用技巧,收获了很多。
第二篇:PID仿真实验报告
自动控制系统结构特性及PID参数整定实验
一、实验目的
1、了解FESTO过程控制系统的组成、结构和功能;
2、掌握PID控制器的基本原理;
3、掌握试凑法对系统PID参数进行整定。
二、实验设备
实验设备采用由德国FESTO生产组装的流体控制系统。该系统由液位站、流量站、压力站、温度站和旁通站五个站点构成,其中前四个站可以独立进行水的液位、流量、压力、温度四个物理量测试和控制实验。四个站的水路通过旁通站相连,并通过旁通站与计算机主机进行控制数据的通信。
同时在计算机端使用FESTO检控软件对控制过程进行监控。通过该软件还可以对各个数字控制系统的比例积分微分系数以及设定值、输出值进行设定。并可以曲线形式显示传感器的返回信号。
三、实验内容
1、通过计算机监控软件,按照指导书上设定的参数对压力站进行设定,并观察系统阶跃响应曲线的变化,并记录。
2、对压力站进行PID参数的整定使得其系统的阶跃响应最优。(自立调节目标)
四、实验结果
1、总结实验中液位、流量、压力、温度控制系统的共同特点。
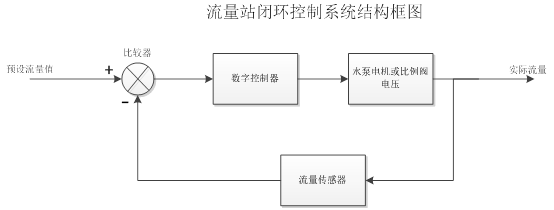
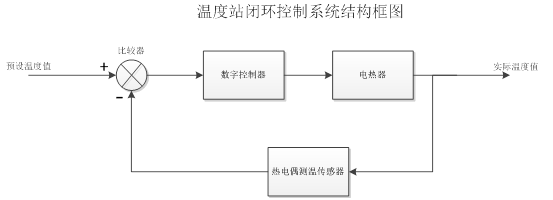
答:(1)四个站点均为对流体的一项物理状态进行检测,并通过检测量与对应物理量预设值的比较结果控制相应的执行环节使得被控制量达到预设值。
(2)四个站点均采用闭环负反馈的控制方法实现了自动控制。
(3)四个站点均具有传感器,数字控制器、电动机、泵等主要元件。
2、分别写出液位、流量、压力、温度站的闭环控制系统结构框图。
根据实验指导书上所述原理,画出四个站点的闭环控制系统结构框图如下:


3、实验数据表格记录
Ⅰ、FESTO监控软件操作练习,对压力站完成以下实验:
1)设定(Kp=1,Tr=0.5,Td=0)设定值W=30,观察系统阶跃响应曲线的变化。

由图线可以看出系统的响应为衰减震荡。调节时间较长。
2)设定(Kp=5,Tr=0.5,Td=0)设定值W=30,观察系统阶跃响应曲线的变化。

由图线可以看出系统发生等幅振荡。
3)设定(Kp=1,Tr=1,Td=0)设定值W=30,观察系统阶跃响应曲线的变化。
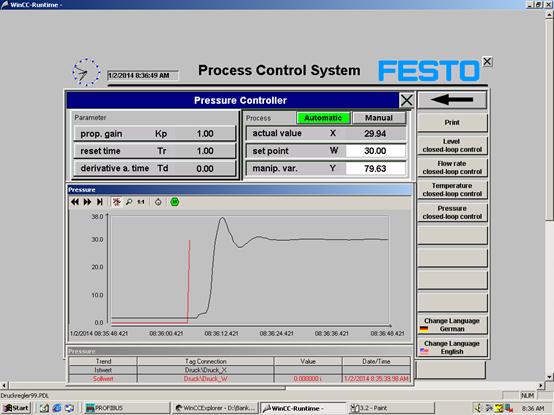
可以看到增大Tr之后,系统的震荡次数大大减少。
4)设定(Kp=0.5,Tr=1,Td=0)设定值W=30,观察系统阶跃响应曲线的变化。

通过图线可以直观的看到系统的超调量进一步减小,但是系统的调节时间变的更长了。
总体来看,增大Kp的值可以使的系统快速逼近设定值,提高了系统的快速性,但是会带来超调以及稳态误差等问题。减小积分环节系数Tr可以看到,系统能够较快的达到预设值,并减小震荡次数。
Ⅱ、选择压力站,调整PID控制的参数,使得系统的阶跃响应最好。
(1)、设定(Kp=0.5,Tr=1,Td=0)设定值W=30,用配凑法对PID进行整定如下:
(由于在前面的压力站测试中,第四组的结果最为理想,我们直接在第四组数据的基础上进行调试,寻找最佳的系数组合。)

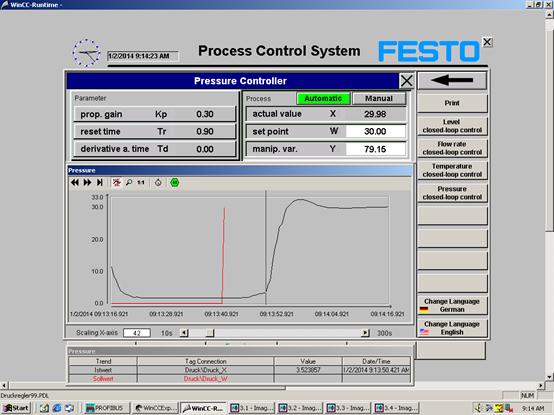
 由于参考值的超调量较大,故将Kp减至0.3,具体阶跃响应如上图所示。经过测量发现,系统的超调量依旧不理想。故打算继续减小Kp值。
由于参考值的超调量较大,故将Kp减至0.3,具体阶跃响应如上图所示。经过测量发现,系统的超调量依旧不理想。故打算继续减小Kp值。

在不断减小Kp和Tr以期望得到较小超调量的过程中,发现响应速度也随之减小,不符合实验预期。因此,为达到超调量较小、响应速度快、稳态误差小的目的,依据Kp,Tr,Td的调节规则进行不断调试。

最终调至Kp=0.35,Tr=1.10,Td=0.10后,得到的曲线基本符合要求,如上图。
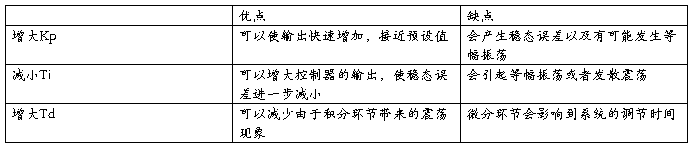
(2)、总结各个参数变化对于系统阶跃响应的影响,列入下表。
五、个人体悟
本次实验中通过试凑法对系统PID参数进行整定,直观地将课本中所学到的PID调节的理论知识运用到实践当中。由于对于理论的认识还不是足,导致调节过程较为缓慢,并且调节的方向不够明确。不过在助教的耐心讲解和本组同学不断摸索下,我们逐渐明确了每一步调节的目的,以及要完成此目的需要调节的参数。在这样的情况下,通过几次调节,我们得到了预期的结果。
总体而言,本次实验还是比较顺利的,个人收获也有不少。通过助教细致地讲解PID在实验中的运用后,我更深刻的认识了朱老师课堂上所讲授的内容。学习这样抽象的理论知识,我认为最为快捷和直观的方式就是通过做实验,而这次实验也确实达到了这样的目的,对我以后的学习有很大的帮助。