
目录
1系统仿真实验概述………………………………………………………1
2系统仿真实验目的………………………………………………………2
3系统仿真实验内容…………………………………………………2
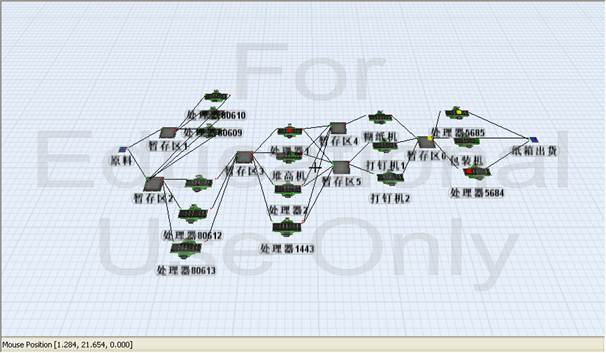
3.1系统仿真实验模型……………………………………………………………2
3.2系统仿真实验模型运行结果…………………………………………………3
3.3系统仿真实验模型数据………………………………………………………4
3.4系统仿真实验问题……………………………………………………………4
4 系统仿真实验改进…………………………………………………………………4
4.1增加压线作业机、印刷裁剪机、堆高机机器及包装机数量后情况………4
4.2改进原料投入间隔时间………………………………………………………5
4.3改进结果………………………………………………………………………6
5 系统仿真实验总结…………………………………………………………………7
1系统仿真实验概述
1.1仿真研究的重点通常是一个流程或者是一类设施,被称为一个系统。为了能科学的研究这个系统,我们必须作出一组关于其如何运作的假设。这些假设通常是系统各部分间的数学关系或逻辑关系,所有的假设构成了一个模型,人们通过这个模型可以了解原始系统的行为方式和特点。如果组成模型的只是简单关系,我们可以通过数学方法(如代数学、微积分和概率)来获取所需要的准确信息;这被称为解析解。然而,现实生活中多数的系统都很复杂,无法用实际模型来解析求解,它们必须用仿真的方法进行研究。仿真是通过使用计算机来对模型进行数值分析,以此获得反映模型真实特征的数据。
举个例子来说明一下仿真的应用。一家制造型企业正在考虑扩建其中的一个工厂,即建造新的厂房,但是不知道由此带来的生产力提高是否值得投入相应的建设费用。有一种方法是先将新厂房建好,如果新建的厂房无法达到预期的生产效率再将其拆除;显然,这种方式是不经济的。但是,仿真研究可以很好的解决这个问题。通过假设需要新建的厂房已经建好并模拟其实际的运作,该公司可以依据仿真结果最终决定是否扩建这个工厂。
仿真是目前使用最广的运筹学及管理科学技术之一,其应用领域很多,范围很广。仿真在用于解决某些特殊问题时非常有效,以下是这些应用问题的列表:
1 设计并分析生产制造系统;
2 评估军事装备系统及其后勤需求;
3 确定通讯网络的硬件要求或通讯协议;
4 确定计算机系统的软硬件要求;
5 设计并运营交通系统,如机场、高速公路、港口和地铁;
6 评估服务设施的设计方案,如电话中心、快餐店、医院和邮局;
7 商业流程再造
8 确定库存系统的订货策略
9 分析财务或经济系统。
然而,仿真很难被人们进一步的接受和使用,主要是因为其面临了很多的阻碍。首先,用于研究大规模系统的模型通常很复杂,编程实现这些模型是非常费事的。近几年,一些优秀软件的开发使得这个实现过程变得简单许多,这些软件能够自动提供很多用于编程实现仿真模型的特征。
1.2复杂系统仿真的第二个问题是其实现有时需要大量的计算时间。不过,随着计算机变得越来越快、越来越便宜,这个问题正渐渐的不那么严重了。最后,人们对仿真有个很不好的认识,觉得仿真只是一个复杂的计算机编程工作。因此,很多仿真研究都是由启发式模型建立、编程、程序运行一次并记录结果这些步骤组成。这种研究方式忽略了如何用一个已建立的模型与实际系统交互,我们担心正是这种方式会从很多仿真研究中得出错误的结论。仿真方法论是和所使用的软硬件相独立的。
2系统仿真实验目的
2.1 确定仿真模型结构和仿真目标;建立Flexsim模型; 仿真分析与优化;撰写仿真分析报告,系统论述实际系统的特点、矛盾、原因,提出解决方案和预期效果,通过系统仿真来了解某纸箱制造厂作业的瓶颈站的利用率,生产线的投料率(到达率),在制品生产周期与生产效率的关系,为纸箱制造厂内现场管理提供参考。
3系统仿真实验内容
我学号后两位是12,故运行时间=12*30*24*60=518400
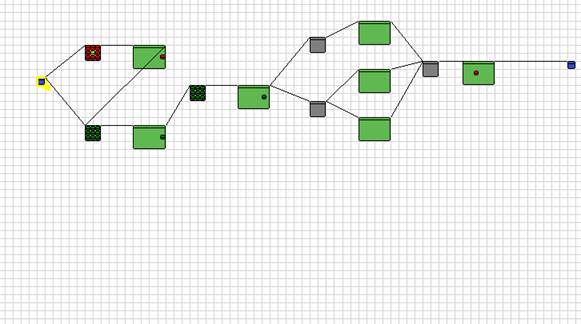
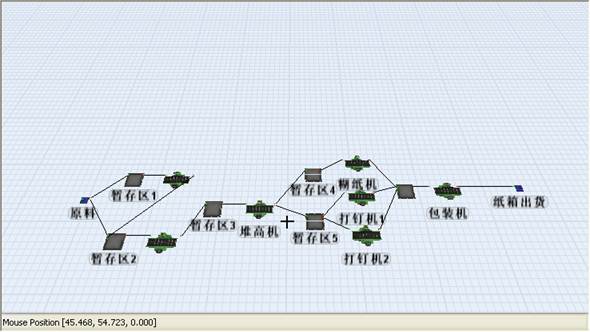
3.1系统仿真实验模型
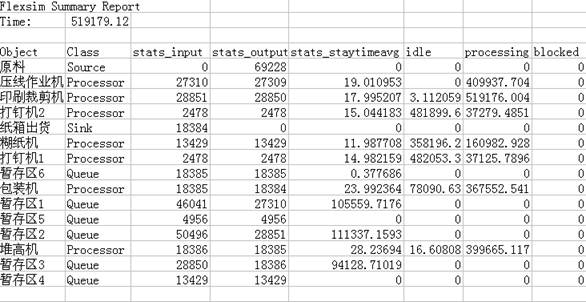
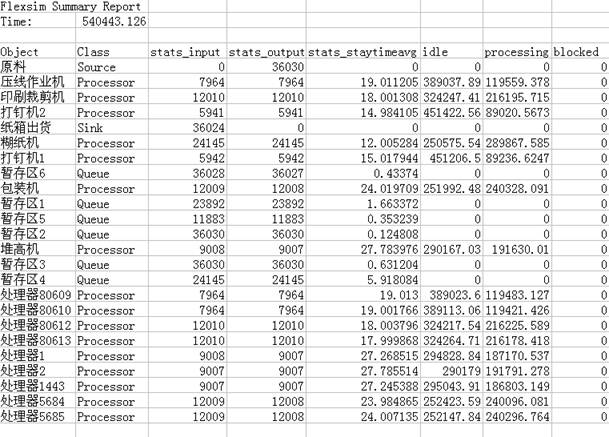
3.2系统仿真实验模型运行结果

3.3系统仿真实验模型数据
3.4系统仿真实验问题
从实验运行数据,由3.2及3.3可以看出,暂存区1和暂存区2以及暂存区3,有大量的原料累积,等待加工时间很长,分别达到了10559.7176、111337.1593、94128.71019,这严重降低了生产线作业效率,可以看出压线作业机和印刷剪裁机堆高机是整个生产线的瓶颈工序,这是后续机器空闲时间过长,例如糊纸机和打钉机,所以需要对压线作业机、印刷裁剪机、堆高机进行改进。
4 系统仿真实验改进
4.1增加压线作业机、印刷裁剪机、堆高机机器及包装机数量后情况。

这样可以看出就算是增加机器数量的情况下,前面机器解决了堆积问题,但后面的机器也要增加机器数量,否则也要造成产品大量堆积,目前并不能作为改善的方法。
4.2改进原料投入间隔时间
这时则需要通过增大原料到来的时间间隔分布来控制改变设备使用率,以达到仿真动态系统的优化。
4.3改进结果
通过增大原料到达时间间隔后以及增加瓶颈工序机器数量后的结果
由上可以得出
1、增大原料到达时间间隔,原料到达间隔时间短使后续机器来不及加工,这样造成了原料的堆积,而一味增加后续机器会使成本剧增,所以增大原料到达间隔很有必要;
2、相应的增加瓶颈工序的机器数量,虽然增加机器数量使生产线成本提高,但是合理的增加机器数量能够使生产线效率得到极大的提高,这样也是另一种降低成本的方式,通过合适的方法找出合理的机器数量。
3、合理的放置设施的位置,合理的机器位置不仅能使作业人员减少走动,降低作业人员没有必要的动作与行走路程,减少了作业人员的疲劳,这也使生产线效率得到提高。
总的来说只是粗糙的找到了改进方法,要使生产线达到最合理的情况,还需要仔细的分析处理才能得到最合理的情况。
5 系统仿真实验总结
本次实验使我初步熟悉了FLEXSIM的操作,以及各项分析的操作步骤,从实验数据中看到了许多可以改进的地方,收获很多。本次课程设计旨于仿真模拟某纸制品制造厂加工作业的动态过程,通过使用软件比较真实的仿真了这一动态过程,并对仿真过程进行了验证,评估了其有效性,通过记录三种纸箱的平均生产周期、月产能、每台机器的使用率、印刷裁剪台的平均等候长度以及系统内的平均在制品数量等数据,找出了整个流物流系统仿真与建模中的瓶颈,从而改进仿真的条件,提出优化方案,达到了提高设备使用率的目标。经过本次课程设计,我能基本熟练掌握软件使用其进行仿真,也了解到了仿真的重要性,特别是其实用意义,加深了对于各加工作业流程的熟悉。
第二篇:信号与系统仿真实验报告3
上机实验三:连续LTI系统频域分析
验证试验
1_3
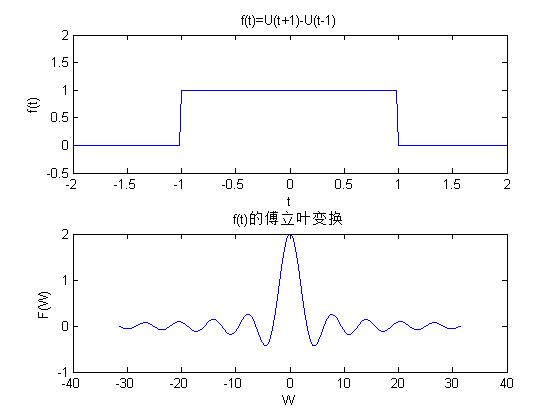
R=0.02;t=-2:R:2;
f=stepfun(t,-1)-stepfun(t,1);
W1=2*pi*5; %频率密度
N=500; %采样数为N
k=0:N;
W=k*W1/N; %W为频率正半轴的采样点
F=f*exp(-j*t'*W)*R; %求F(jw)
F=real(F);W=[-fliplr(W),W(2:501)];
F=[fliplr(F),F(2:501)];
subplot(2,1,1);plot(t,f);xlabel('t');ylabel('f(t)');axis([-2,2,-0.5,2]);title('f(t)=U(t+1)-U(t-1)');
subplot(2,1,2);plot(W,F);xlabel('W');ylabel('F(W)');title('f(t)的傅立叶变换');
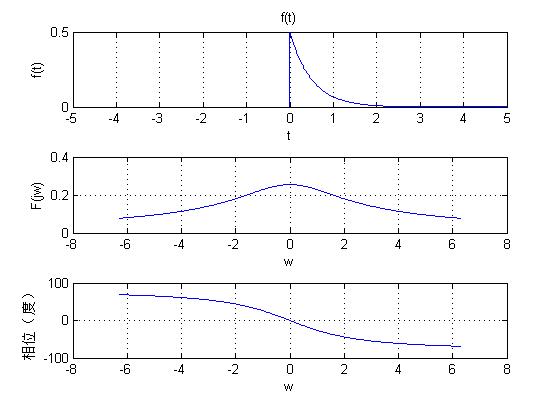
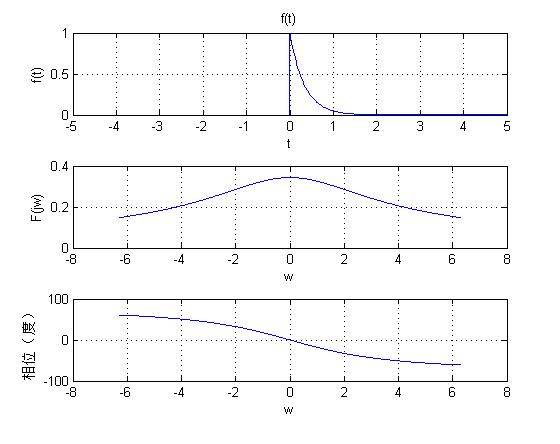
2_1
clear all;
clc;
r=0.02;t=-5:r:5;N=200;Y=2*pi;k=-N:N;w=k*Y/N;
f1=1/2*exp(-2*t).*stepfun(t,0);%f(t)
F=r*f1*exp(-j*t'*w);%f(t)的傅立叶变换
F1=abs(F);P1=angle(F);
subplot(3,1,1);plot(t,f1);grid;xlabel('t');ylabel('f(t)');title('f(t)');
subplot(3,1,2);plot(w,F1);xlabel('w');grid;ylabel('F(jw)');
subplot(3,1,3);plot(w,P1*180/pi);grid;xlabel('w');ylabel('相位(度)');
2_2
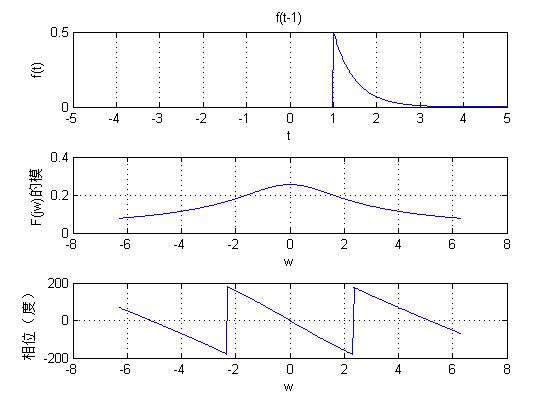
clear all;clc;
r=0.02;t=-5:r:5;N=200
Y=2*pi;k=-N:N;w=k*Y/N;
f1=1/2*exp(-2*(t-1)).*stepfun(t,1);%f(t)
F=r*f1*exp(-j*t'*w); %f(t)的傅立叶变换
F1=abs(F);P1=angle(F);
subplot(3,1,1);plot(t,f1);grid on;xlabel('t');ylabel('f(t)');title('f(t-1)')
subplot(3,1,2);plot(w,F1);grid on;xlabel('w');ylabel('F(jw)的模');
subplot(3,1,3);plot(w,P1*180/pi);grid;xlabel('w');ylabel('相位(度)');
2_3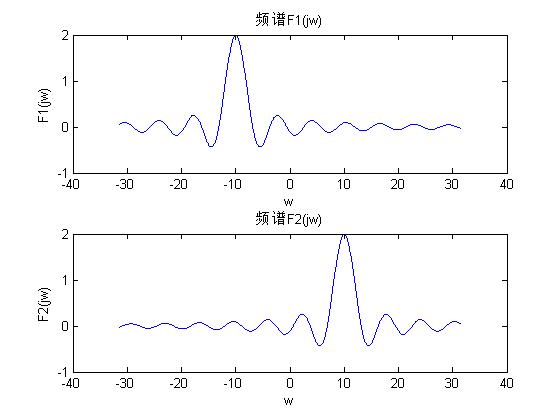
clear all;clc;
R=0.02;t=-2:R:2;f=stepfun(t,-1)-stepfun(t,1);
f1=f.*exp(-j*10*t);
f2=f.*exp(j*10*t);
W1=2*pi*5;
N=500;k=-N:N;W=k*W1/N;
F1=f1*exp(-j*t'*W)*R; %f1(t)傅立叶变换
F2=f2*exp(-j*t'*W)*R; %f2(t)傅立叶变换
F1=real(F1);F2=real(F2);
subplot(2,1,1);plot(W,F1);xlabel('w');ylabel('F1(jw)');title('频谱F1(jw)');
subplot(2,1,2);plot(W,F2);xlabel('w');ylabel('F2(jw)');title('频谱F2(jw)');
设计实验
1_2
clear all;
clc;
r=0.02;t=-5:r:5;N=200;Y=2*pi;k=-N:N;w=k*Y/N;
f1=exp(-3*t).*stepfun(t,0);%f(t)
F=r*f1*exp(-j*t'*w);%f(t)的傅立叶变换
F1=abs(F);P1=angle(F);
subplot(3,1,1);plot(t,f1);grid;xlabel('t');ylabel('f(t)');title('f(t)');
subplot(3,1,2);plot(w,F1);xlabel('w');grid;ylabel('F(jw)');
subplot(3,1,3);plot(w,P1*180/pi);grid;xlabel('w');ylabel('相位(度)');
1_2_2

clear all;clc;
r=0.02;t=-5:r:5;N=200
Y=2*pi;k=-N:N;w=k*Y/N;
f1=exp(-3*(t-4)).*stepfun(t,1);%f(t)
F=r*f1*exp(-j*t'*w); %f(t)的傅立叶变换
F1=abs(F);P1=angle(F);
subplot(3,1,1);plot(t,f1);grid on;xlabel('t');ylabel('f(t)');title('f(t-4)')
subplot(3,1,2);plot(w,F1);grid on;xlabel('w');ylabel('F(jw)的模');
subplot(3,1,3);plot(w,P1*180/pi);grid;xlabel('w');ylabel('相位(度)');
1_2_3
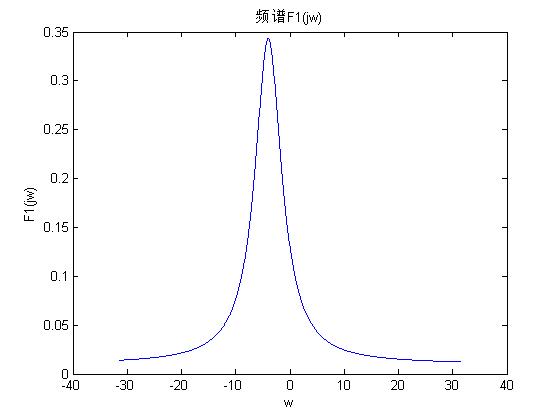
clear all;clc;
R=0.02;t=-20:R:20;f=exp(-3*t).*stepfun(t,0);
f1=f.*exp(-j*4*t);
W1=2*pi*5;
N=500;k=-N:N;W=k*W1/N;
F1=f1*exp(-j*t'*W)*R; %f1(t)傅立叶变换
F1=real(F1);
plot(W,F1);xlabel('w');ylabel('F1(jw)');title('频谱F1(jw)');