xxxxx机电学院
机电一体化课程设计报告
题目:
专业班级:机械制造及其自动化091
姓 名:
时 间:2012.5.25 ~2012.06.08
指导教师: 丛晓霞 王玉萍
完成日期:2012 年 06月 08 日
××××设计任务书(小三宋体)
1.设计目的与要求(5号黑体)
设计出一个用于控制灯的控制器。准确地理解有关要求,独立完成系统设计,要求所设计的电路具有以下功能:
(1)每段灯的点亮与熄灭可以通过编程来实现(点阵是16×16)。
(2)每间隔一段时间,点亮灯的图样变化一次(自己设定或随机)。
(3)图样变化的间隔时间可以调节。
2.设计内容
(1)画出电路原理图,正确使用逻辑关系;
(2)确定元器件及元件参数;
(3)进行电路模拟仿真;
(4)SCH文件生成与打印输出;
(5)PCB文件生成与打印输出;
3.编写设计报告
写出设计的全过程,附上有关资料和图纸,有心得体会。
4.答辩
在规定时间内,完成叙述并回答问题。
(任务书要求单页打印。1.5倍行间距,标准字间距。)
目 录(四号仿宋、加粗、居中)
1引言……………………………………………………………………………………… 1
2 总体设计方案…………………………………………………………………………… 1
2.1 设计思路……………………………………………………………………………… 1
2.2 总体设计框图………………………………………………………………………… 2
3 设计原理分析…………………………………………………………………………… 2
3.1 电源的选择…………………………………………………………………………… 2
3.2 振荡电路……………………………………………………………………………… 2
3.3 花样脉冲产生、花样脉冲选择与控制电路………………………………………… 3
3.4 驱动显示电路………………………………………………………………………… 4
3.5 总体电路……………………………………………………………………………… 5
4 总结与体会……………………………………………………………………………… 5
参考文献…………………………………………………………………………………… 5
附录1…………………………………………………………………………………… 6
附录2……………………………………………………………………………………… 8
题目(小3号仿宋加粗居中)
摘 要:(5号仿宋)
关键词:(5号仿宋)
1 引言(为四号仿宋加粗,段前、段后间距0.5行)
(内容为小四号仿宋,首行缩进二个字,行距为固定值20。)
2 总体设计方案(为四号仿宋加粗,段前、段后间距0.5行)
(内容为小四号仿宋,首行缩进二个字,行距为固定值20。)
2.1 设计思路(为小四号仿宋加粗,段前、段后间距0.5行)
2.2 总体设计框图(为小四号仿宋加粗,段前、段后间距0.5行)
3 设计原理分析
3.1
3.1.1(为小四号仿宋)
正文全部为小四号仿宋,首行缩进两字。图、表都居中,要有对应的图号、图题、表号和表题。图、表中的文字为5号仿体。图号、图题在图的下面,表号和表题在表的上面居中。页码居中(从正文开始排)。A4纸排版,页边距上、下、右为2cm,左为3cm。行距为固定值20。整个报告一般不超过15页。
3.1.2
3.2
4 总结与体会
参考文献
[1] 叶挺秀.应用电子学[M].杭州:浙江大学出版社,1994
[2] 阎石.数字电子技术基础(第三版)[M]. 北京:高等教育出版社,1989
[3] 李旭东,宗光华,毕树生,等.生物工程微操作机器人视觉系统的研究[J].北京航空航天大学学报,2002,28(3):249~252
附录1
附录2
参考文献著录内容要求及示例
1. 专著著录格式
[序号]著者.书名[M].版本(第一版不写).出版地:出版者,出版年.起止页码
例[1]孙家广,杨长青.计算机图形学[M].北京:清华大学出版社,1995.26~28
Sun Jiaguang, Yang Changqing. Computer graphics[M].Beijing: Tsinghua University Press,1995.26~28(in Chinese)
[2]Skolink M I. Radar handbook[M]. New York: McGraw-Hill, 1990
2. 期刊著录格式
[序号]作者.题名[J].刊名,出版年份,卷号(期号):起止页码
例[3]李旭东,宗光华,毕树生,等.生物工程微操作机器人视觉系统的研究[J].北京航空航天大学学报,2002,28(3):249~252
Li Xudong, Zong Guanghua, Bi Shusheng, et al. Research on global vision system for bioengineering-oriented micromanipulation robot system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2002,28(3):249~252(in Chinese)
3. 论文集著录格式
[序号]作者.题名[A].见(英文用In):主编.论文集名[C].出版地:出版者,出版年.起止页码
例[4]张佐光,张晓宏,仲伟虹,等.多相混杂纤维复合材料拉伸行为分析[A].见:张为民编.第九届全国复合材料学术会议论文集(下册)[C].北京:世界图书出版公司,1996.410~416
[5]Odoni A R. The flow management problem in air traffic control[A]. In: Odoni A R, Szego G,eds. Flow Control of Congested Networks[C]. Berlin: Springer-Verlag,1987.269~298
4. 学位论文著录格式
[序号]作者.题名[D].保存地点:保存单位,年
例[6]金 宏.导航系统的精度及容错性能的研究[D].北京:北京航空航天大学自动控制系,1998
5. 科技报告著录格式
[序号]作者.题名[R].报告题名及编号,出版年
例[7]Kyungmoon Nho. Automatic landing system design using fuzzy logic[R].AIAA-98-4484,1998
6. 国际或国家标准著录格式
[序号]标准编号,标准名称[S]
例[8]GB/T 16159-1996,汉语拼音正词法基本规则[S]
7. 专利著录格式
[序号]专利所有者.专利题名[P].专利国别:专利号,出版日期
例[9]姜锡洲.一种温热外敷药制备方案[P].中国专利:881056073,1989-07-06
8. 电子文献著录格式
[序号]作者.题名[电子文献/载体类型标识].电子文献的出处或可获得地址,发表或更新日期/引用日期
例[10]王明亮.关于中国学术期刊标准化数据系统工程的进展[EB/OL]. http://www.cajcd.edu.cn/pub/wm1.txt/980810-2.html,1998-08-16/1998-10-04
9. 各种未定义类型的文献
[序号]作者.题名[Z].出版地:出版者,出版年
说明:
(1)参考文献应是公开出版物,按在论著中出现的先后用阿拉伯数字连续排序。
(2)参考文献中外国人名书写时一律姓前,名后,姓用全称,名可缩写为首字母(大写),不加缩写点(见例2)。
(3)参考文献中作者为3人或少于3人应全部列出,3人以上只列出前3人,后加“等”或“et al”(见例3)。
(4)在著录中文参考文献时应提供英文著录,见例1、例3。
(5)参考文献类型及其标识见表1,电子参考文献类型及其标识见表2。
(6)电子文献的载体类型及其标识为:磁带——MT, 磁盘——DK, 光盘——CD,
联机网络——OL。
表1 参考文献类型及文献类型标识

表2 电子参考文献类型及其标识

第二篇:机电一体化技术课程设计
课程设计说明书
课程名称: 机电一体化技术 设计题目: 交通信号灯模拟控制系统的设计 专 业: 机电一体化技术 班 级: 机电083 姓 名: 魏 亚 飞 学 号:指导教师: 设计时间: 2010.12.13~2010.12.20
河南机电高等专科学校
机电工程系
河南机电高等专科学校
一、 课程设计题目: 交通信号灯模拟控制系统的设计
二、 课程设计时间: 2010.12.13~2010.12.20
三、 课程设计技术参数和任务要求:

四、 考核
目录
1 绪论............................................................................................................................ 5
1.1引言................................................................................................................... 5
1.2单片机概述....................................................................................................... 5
2 MSC-8051单片机的结构及原理 .............................................................................. 6
2.1MSC -8051型单片机的基本结构 .................................................................... 6
2.2MSC -8051型单片机的引脚功能 .................................................................... 7
2.3数据存储器....................................................................................................... 9
2.4程序存储器....................................................................................................... 9
2.5单片机的时钟电路与时序............................................................................. 10
2.5.1时钟电路............................................................................................... 10
2.5.2时序定时单位....................................................................................... 10
3 系统设计.................................................................................................................. 12
3.1拟定方案......................................................................................................... 12
3.2系统硬件设计................................................................................................. 12
3.3软件设计......................................................................................................... 13
3.3.1程序流程图如图3-1所示。 ............................................................... 13
3.3.2程序代码............................................................................................... 14
3.3.3电路原理图........................................................................................... 16
4 设计总结.................................................................................................................. 17
1 绪论
1.1引言
当今,红绿灯安装在各个道口上,已经成为疏导交通车辆最常见和最有效的手段。但这一技术在19世纪就已出现了。
1858年,在英国伦敦主要街头安装了以燃煤气为光源的红、蓝两色的机械扳手式信号灯,用以指挥马车通行。这是世界上最早的交通信号灯。1868年,英国机械工程师纳伊特在伦敦威斯敏斯特区的议会大厦前的广场上,安装了世界上最早的煤气红绿灯。它由红绿两以旋转式方形玻璃提灯组成,红色表示“停止”,绿色表示“注意”。1869年1月2日,煤气灯爆炸,使警察受伤,遂被取消。
电气启动的红绿灯出现在美国,这种红绿灯由红绿黄三色圆形的投光器组成,19xx年始安装于纽约市5号大街的一座高塔上。红灯亮表示“停止”,绿灯亮表示“通行”。 19xx年,又出现了带控制的红绿灯和红外线红绿灯。带控制的红绿灯,一种是把压力探测器安在地下,车辆一接近红灯便变为绿灯;另一种是用扩音器来启动红绿灯,司机遇红灯时按一下嗽叭,就使红灯变为绿灯。红外线红绿灯当行人踏上对压力敏感的路面时,它就能察觉到有人要过马路。红外光束能把信号灯的红灯延长一段时间,推迟汽车放行,以免发生交通事故。
信号灯的出现,使交通得以有效管制,对于疏导交通流量、提高道路通行能力,减少交通事故有明显效果。19xx年,联合国《道路交通和道路标志信号协定》对各种信号灯的含义作了规定。绿灯是通行信号,面对绿灯的车辆可以直行,左转弯和右转弯,除非另一种标志禁止某一种转向。左右转弯车辆都必须让合法地正在路口内行驶的车辆和过人行横道的行人优先通行。红灯是禁行信号,面对红灯的车辆必须在交叉路口的停车线后停车。黄灯是警告信号,面对黄灯的车辆不能越过停车线,但车辆已十分接近停车线而不能安全停车时可以进入交叉路口。
1.2单片机概述
单片机微型计算机是微型计算机的一个重要分支,也是颇具生命力的机种。单片机微型计算机简称单片机,特别适用于控制领域,故又称为微控制器。
通常,单片机由单块集成电路芯片构成,内部包含有计算机的基本功能部件:中央处理器、存储器和I/O接口电路等。因此,单片机只需要和适当的软件及外部设备相结合,便可成为一个单片机控制系统。
单片机经过1、2、3、4代的发展,目前单片机正朝着高性能和多品种方向发展,它们的CPU功能在增强,内部资源在增多,引角的多功能化,以及低电压底功耗。
2 MSC-8051单片机的结构及原理
2.1MSC -8051型单片机的基本结构
8051单片机包含中央处理器、程序存储器(ROM)、数据存储器(RAM)、定时/计数器、并行接口、串行接口和中断系统几个部分,其结构框图如图2-1所示。
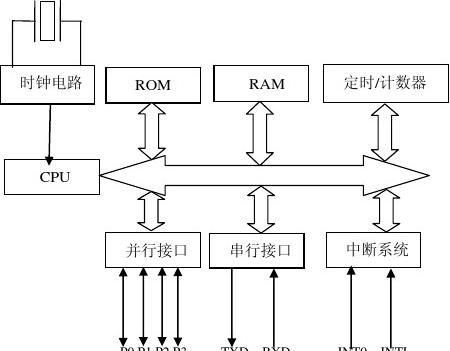
图2-1MSC-8051系统结构框图
在一个芯片上集成了一个单片机的各个组成部分,其功能如下:
(1)中央处理器(CPU):是整个单片机的核心部件,是8位数据宽度的处理器,能处理8位二进制数据或代码,CPU负责控制、指挥和调度整个单元系统协调的工作,完成运算和控制输入输出功能等操作。
(2)片外数据存储器(RAM):8051内部有128个8位用户数据存储单元和128个专用寄存器单元,它们是统一编址的,专用寄存器只能用于存放控制指令数据,用户只能访问,而不能用于存放用户数据,所以,用户能使用的RAM只有128个,可存放读写的数据,运算的中间结果或用户定义
(3)片内程序存储器(ROM):8051共有4096个8位掩膜ROM,用于存放用户程序,原始数据或表格。
(4)并行输入输出(I/O)口:8051共有4组8位I/O口(P0、 P1、P2或P3),用于对外部数据的传输。
(5)中断系统:8051具备较完善的中断功能,有两个外中断、两个定时/计数器中断和一
个串行中断,可满足不同的控制要求,并具有2级的优先级别选择。
(6)时钟电路:8051内置最高频率达12MHz的时钟电路,用于产生整个单片机运行的脉冲时序,但8051单片机需外置振荡电容。
2.2MSC -8051型单片机的引脚功能
MCS-51系列单片机中的8051采用40Pin封装的双列直接DIP结构,图2-2是它们的引脚配置,40个引脚中,正电源和地线两根,外置石英振荡器的时钟线两根,4组8位共32个I/O口,中断口线与P3口线复用。
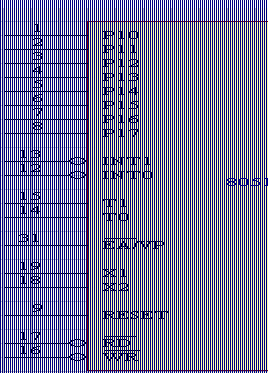
图2-2
1电源引脚VSS和VCC
VCC:电源+5V输入 。
VSS:GND接地。
2外接晶体引脚XTAL1和XTAL2
XTAL1和XTAL2 外接晶振引脚。当使用芯片内部时钟时,此二引脚用于外接石英晶体和微调电容;当使用外部时钟时,用于接外部时钟脉冲信号。
3控制或与其它电源复用引脚RESET/VPD、ALE/PROG、PESN、VE/VPP
RESET/VPD复位信号复用脚,当8051通电,时钟电路开始工作,在RESET引脚上出现24个时钟周期以上的高电平,系统即初始复位。初始化后,程序计数器PC指向0000H,P0-P3输出口全部为高电平,堆栈指针写入07H,其它专用寄存器被清“0”。RESET由高电平下降为低电平后,系统即从0000H地址开始执行程序。然而,初始复位不改变RAM(包括工作寄存器R0-R7)的状态,8051的初始态。
8051的复位方式可以是自动复位,也可以是手动复位,见下图2-3。此外,RESET/VPD还是一复用脚,VCC掉电其间,此脚可接上备用电源,以保证单片机内部RAM的数据不丢失。
图2-3
ALE/PROG当访问外部程序器时,ALE(地址锁存)的输出用于锁存地址的低位字节。而访问内部程序存储器时,ALE端将有一个1/6时钟频率的正脉冲信号,这个信号可以用于识别单片机是否工作,也可以当作一个时钟向外输出。更有一个特点,当访问外部程序存储器,ALE会跳过一个脉冲。如果单片机是EPROM,在编程其间,ALE/PROG将用于输入编程脉冲。
PESN。外部程序存储器读选通信号:在读外部ROM时PSEN低电平有效,以实现外部ROM单元的读操作。
1、内部ROM读取时,PESN不动作;
2、外部ROM读取时,在每个机器周期会动作两次;
3、外部RAM读取时,两个PESN脉冲被跳过不会输出;
4、外接ROM时,与ROM的OE脚相接。
EA/VPP程序存储器的内外部选通线,8051和8751单片机,内置有4kB的程序存储器,当EA为高电平并且程序地址小于4kB时,读取内部程序存储器指令数据,而超过4kB地址则读取外部指令数据。如EA为低电平,则不管地址大小,一律读取外部程序存储器指令。显然,对内部无程序存储器的8031,EA端必须接地。
在编程时,EA/VPP脚还需加上21V的编程电压。
4.输入/输出引脚P0口P1口P2口P3口
P0口有三个功能:
1、外部扩展存储器时,当做数据总线。
2、外部扩展存储器时,当作地址总线。
3、不扩展时,可做一般的I/O使用,但内部无上拉电阻,作为输入或输出时应在外部接上拉电阻。
P1口 只做I/O口使用:其内部有上拉电阻。
P2口:
1、扩展外部存储器时,当作地址总线使用。
2、做一般I/O口使用,其内部有上拉电阻。
P3口有两个功能:
1、除了作为I/O使用外,还有一些特殊功能,由特殊寄存器来设置。
2、有内部EPROM的单片机芯片,为写入程序需提供专门的编程脉冲和编程电源,这些信号也是由信号引脚的形式提供的。
2.3数据存储器
数据存储器分为内、外两部分,8051内部有128B RAM地址为00H-7FH;片外最多扩展64KB RAM,地址为0000H-FFFFH。内、外RAM地址有重叠。可通过不同的指令来区分;“MOV”是对内部RAM进行读写的操作指令;“MOVX”是对外部RAM进行读写的操作指令。
8051内部128B RAM 的应用最广,可用于暂存运算结果及标志位等。按其用途可以分为三个区域:工作寄存器、位寻地址、用户RAM区。
2.4程序存储器
程序存储器用于存放编好的程序、表格和常数。8051内部有4KB ROM,片外最多可扩展64KB ROM,两者是统一编址的。CPU的控制器专门提供一个控制信号EA来区分内部ROM和外部ROM的公用地址区0000H-0FFFH;当EA接高电平时单片机从片内4KB ROM中取其指令。而当指令地址超过0FFFH后,就自动的向片外ROM取指令。
在程序存储器中,有6个单元具有特殊功能。
0000H-0002H:是所有执行程序的入口地址,8051复活后,CPU总是从0000H单元开始执行程序。
0003H:外部中断0入口。
000BH:定时器0溢出中断口。
0013BH:外部中断1入口。
001BH:定时器1溢出中断入口。
0023BH:串行口中断入口。
2.5单片机的时钟电路与时序
2.5.1时钟电路
时钟电路用于单片机工作所需的时钟信号。时钟信号可以由内部时钟和外部时钟两种方式产生。如图2-4所示。
1.内部时钟方式
8051内部有一个高增益反相放大器。用于构成振荡器,引脚XTAL1和XTAL2分别是此放大器的输入端和输出端。在XTAL1和XTAL2两端跨接晶体或陶瓷谐振器,就构成了稳定的自励振荡器,其发出的脉冲直接送入内部时钟发生器。振荡器频率范围是1.2-12MHz。为了减少寄生电容,更好地保证振荡器稳定可靠地工作,谐振器和电容器应尽可能安装得与单片机芯片靠近。
2.外部时钟方式是采用外部振荡器,外部振荡脉冲信号由XTAL2端接入后直接送至内部时钟发生器,输入端XTAL1应接地。由于XTAL2端的逻辑电平不是TTL的,故建议接一个上拉电阻。
错误!未找到引用源。
图2-4
2.5.2时序定时单位
时序是表达指令执行中各控制信号在时间上的相互关系。时序是用定时单位来说明的,8051时序单位共有4个,从小到大依次是拍、状态、机器周期、指令周期,如图2-5所示。

图2-5
1.拍(P):振荡器脉冲的周期称为拍,它就是晶体的振荡周期,或是外部振荡脉冲的周期,拍实MCS-51单片机中最小的时序单位。
2.状态或时钟周期(S):振荡周期经过二分频后,就得到单片机的时钟信号,把时钟信号的周期称为状态。一个状态包含两个拍,分别称作P1和P2,时钟周期是单片机中最基本的时间单位,在一个时钟周期内,CPU仅完成一个最基本的动作。
3.机器周期:通常把CPU完成一个基本操作所需要的时间称为机器周期。一个机器周期由6个状态(或12拍)组成,可以依次表示为S1P1,S1P2,S2P1,S2P2,?,S6P1,S6P2。 当时钟振荡脉冲频率为12MHz时,一个机器周期为1us;当振荡脉冲频率为6MHz时,一个
机器周期为2us。
4.指令周期:指令周期就是执行一条指令所需的时间。指令周期是MCS-51单片机中最大的时序单位,一半后若干个机器周期组成。指令不同,所需要的机器周期数也不相同,但一条指令的周期应在1-4个机器周期范围内。
3 系统设计
3.1拟定方案
东西、南北两干道交于一个十字路口,各干道有一组红、黄、绿三色的指示灯,指挥车辆和行人安全通行。在此只考虑其中一条干道,红灯亮禁止通行,绿灯亮允许通行。黄灯亮提示人们注意红、绿灯的状态即将切换,且黄灯燃亮时间为东西、南北两干道的公共停车
时间。指示灯交替变换的方案如表3-1。

表3-1
说明:
用红、绿、黄三色发光二极管做信号灯,只考虑一条道路相对的两个方向,每个方向有红、绿、黄三个灯、红灯亮禁止通行,绿灯亮允许通行,每隔30秒红绿黄灯交替变化。在每次由绿灯变成红灯亮或者由红灯亮变成绿灯亮的交替变化转换时间要求黄灯闪烁5秒,给行驶中的车辆有时间停靠到禁行线之外。
3.2系统硬件设计
选用8051单片机一片,8255并行通用接口芯片一片,74LS07两片,MAX692‘看门狗’一片,共阴极的七段数码管两个双向晶闸管若干,7805三端稳压电源一个,红、黄、绿交通灯各两个,开关键盘、连线若干。
3.3软件设计
3.3.1程序流程图如图3-1所示。
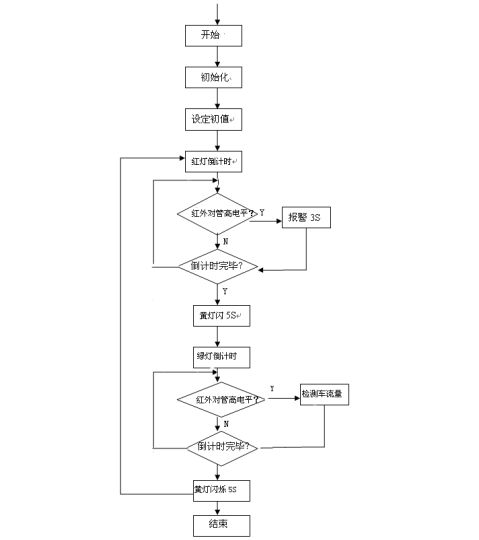
图3-1
3.3.2程序代码
ORG 0000H
LJMP START
ORG 0030H
START: MOV P1,#00H ;信号灯初始状态全灭
SETB P1.2 ;东西方向绿灯亮,东西方向放行
SETB P1.3 ;南北方向红灯亮,南北方向禁止放行 MOV R4 ,#32H;延时30秒
LP1: LCALL DL
DJNZ R4,LP1
CLR P1.2 ;熄灭东西方向绿灯
SETB P1.1 ;东西方向黄灯亮
MOV R4,0AH ;延时5秒
LP2: LCALL DL
DJNZ R4,LP2
MOV P1,00H
SETB P1.0 ;东西方向红灯亮,禁止通行
SETB P1.5 ;南北方向绿灯亮,南北方向放行
MOV R4,#32H ;延时30秒
LP3: LCALL DL
DJNZ R4,LP3
CLR P1.5 ;熄灭南北方向绿灯 SETB P1.4 ;南北方向黄灯亮
MOV R4,0AH ;延时5秒 LP4: LCALL DL
DJNZ R4,LP4
LJNP START;重新开始下一个周期 DL: MOV R7,05H ;0.5秒软件延时子程序 DL1: MOV R6, #0C8H
DL2: MOV R5, #0FAH
DJNZ R5,$
DJNZ R6,DL2
DJNZ R7,DL1
RET
END
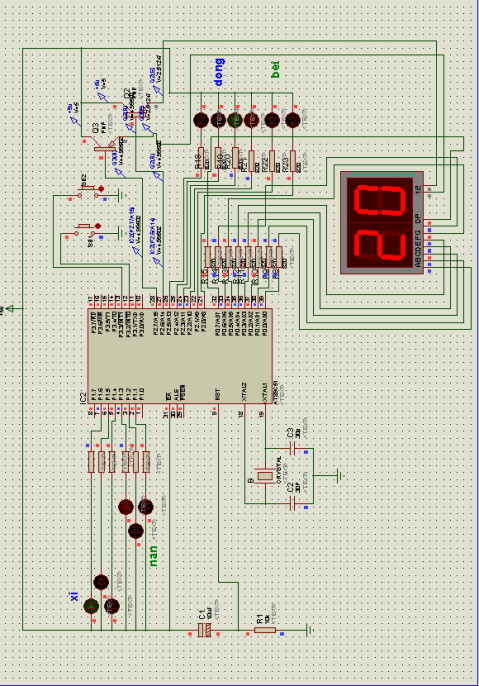
3.3.3电路原理图
4 设计总结
单片机课程设计,是对单片机知识的验证,可以帮助我们理解巩固所学知识,激发我们对单片机课程的兴趣,更锻炼了我们独立思考、开拓创新的能力。
在这次设计中遇到了很多实际性的问题,在实际设计中才发现,书本上理论性的东西与在实际运用中的还是有一定的出入的,所以有些问题不但要深入地理解,而且要不断地更正以前的错误思维。一切问题必须要靠自己一点一滴的解决,而在解决的过程当中你会发现自己在飞速的提升。对于单片机设计,其硬件电路是比较简单的,主要是解决程序设计中的问题,而程序设计是一个很灵活的东西,它反映了你解决问题的逻辑思维和创新能力,它才是一个设计的灵魂所在。因此在整个设计过程中大部分时间是用在程序上面的。很多子程序是可以借鉴书本上的,但怎样衔接各个子程序才是关键的问题所在,这需要对单片机的结构很熟悉。因此可以说单片机的设计是软件和硬件的结合,二者是密不可分的。
通过这次课程设计我也发现了自身存在的不足之处,虽然感觉理论上已经掌握,但在运用到实践的过程中仍有意想不到的困惑,经过一番努力才得以解决。这也激发了我今后努力学习的兴趣,我想这将对我以后的学习产生积极的影响。
其次,这次课程设计让我充分认识到团队合作的重要性,只有分工协作才能保证整个项目的有条不絮。
另外在课程设计的过程中,当我们碰到不明白的问题时,询问同学们和网上查阅资料,给我们的设计以极大的帮助,使我们获益匪浅。
通过这次设计,我懂得了学习的重要性,了解到理论知识与实践相结合的重要意义,学会了坚持、耐心和努力,这将为自己今后的学习和工作做出了最好的榜样。